







实验硬件及原理图:
1. 野火 IMX6ULL-MINI开发板
2.MPU6050G51模块
3.原理图

驱动实现:
1.更改设备树:
(一)&i2c2节点添加MPU6050设备修改IO复用
&i2c2 {
clock_frequency = <100000>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_i2c2>;
status = "okay";
MPU6050: mpu6050@68 {
compatible = "fireMini,mpu6050";
reg = <0x68>;
};
};
pinctrl_i2c2: i2c2grp {
fsl,pins = <
MX6UL_PAD_UART5_TX_DATA__I2C2_SCL 0x4001b8b0
MX6UL_PAD_UART5_RX_DATA__I2C2_SDA 0x4001b8b0
>;
};(二)编译设备树文件,启动开发板
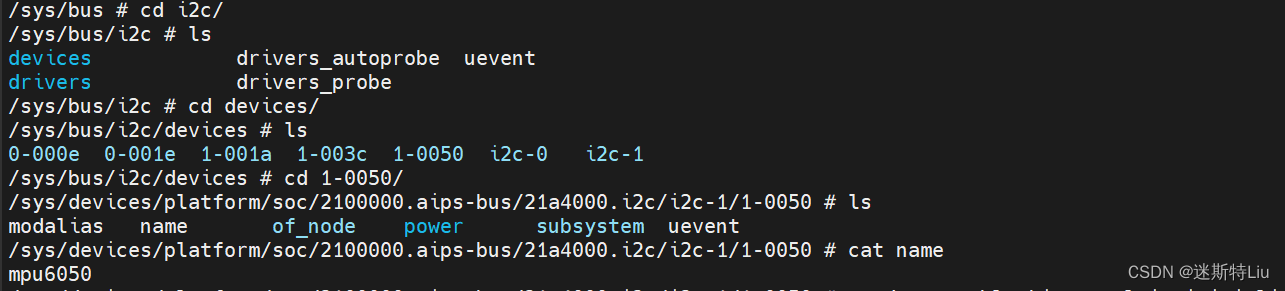
当看到设备添加成功后就可以开始驱动程序的编写
(三)mpu6050.h
#ifndef MPU6050REG_H
#define MPU6050REG_H
typedef unsigned char uint8_t;
/* register define */
#define MPU6050_SMPLRT_DIV 0x19 /*陀螺仪采样率,典型值:0x07(125Hz) */
#define MPU6050_CONFIG 0x1A /*低通滤波频率,典型值:0x06(5Hz)*/
#define MPU6050_GYRO_CONFIG 0x1B /*陀螺仪自检及测量范围,典型值:0x18(不自检,2000deg/s)*/
#define MPU6050_ACCEL_CONFIG 0x1C /*加速计自检、测量范围及高通滤波频率,典型值:0x01(不自检,2G,5Hz)*/
#define MPU6050_ACCEL_XOUT_H 0x3B /**/
#define MPU6050_ACCEL_XOUT_L 0x3C
#define MPU6050_ACCEL_YOUT_H 0x3D
#define MPU6050_ACCEL_YOUT_L 0x3E
#define MPU6050_ACCEL_ZOUT_H 0x3F
#define MPU6050_ACCEL_ZOUT_L 0x40
#define MPU6050_TEMP_OUT_H 0x41
#define MPU6050_TEMP_OUT_L 0x42
#define MPU6050_GYRO_XOUT_H 0x43
#define MPU6050_GYRO_XOUT_L 0x44
#define MPU6050_GYRO_YOUT_H 0x45
#define MPU6050_GYRO_YOUT_L 0x46
#define MPU6050_GYRO_ZOUT_H 0x47
#define MPU6050_GYRO_ZOUT_L 0x48
#define MPU6050_PWR_MGMT_1 0x6B /*电源管理,典型值:0x00(正常启用) */
#define MPU6050_WHO_AM_I 0x75 /* IIC地址寄存器(默认数值0x68,只读) */
#define MPU6050_SlaveAddress 0xD0 /*IIC写入时的地址字节数据,+1为读取*/
#define MPU6050_IIC_ADDR 0x68 /*MPU6050 IIC 器件地址*/
/* 中断状态寄存器*/
#define MPU6050_INT_STATUS 0x3A
# 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 817
817











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











