







目录
1 系统函数及其与系统性质的关系
系统函数的定义:线性时不变系统的输出z变换与输入z变换之比为系统函数。
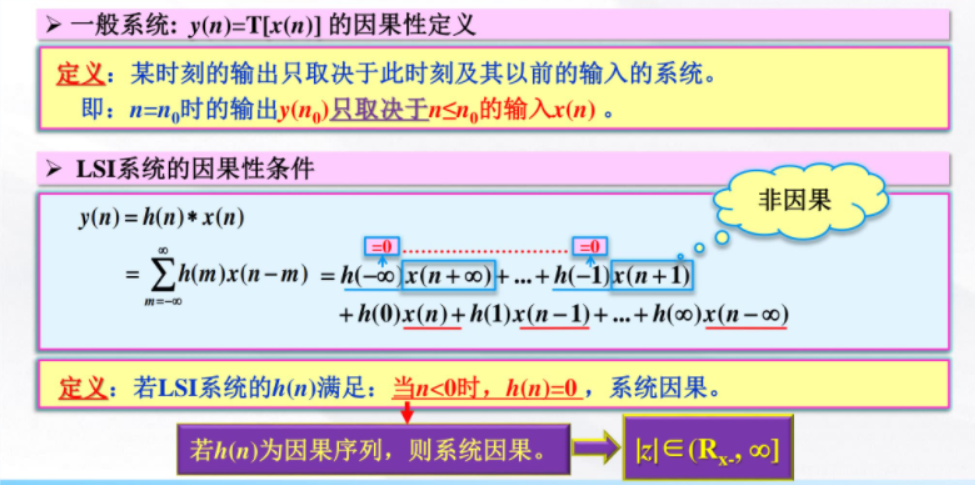
问题引入:为什么要判断系统的因果稳定性?

归纳:
同时一个线性时不变系统,常可用常系数线性差分方程描述。


z=1可以取得到,此时为频域。


反过来说则 极点都在单位圆内未必有系统因果稳定。

零点个数多于极点个数,系统将是非因果系统。此时z会有正值,对应h会有负值。





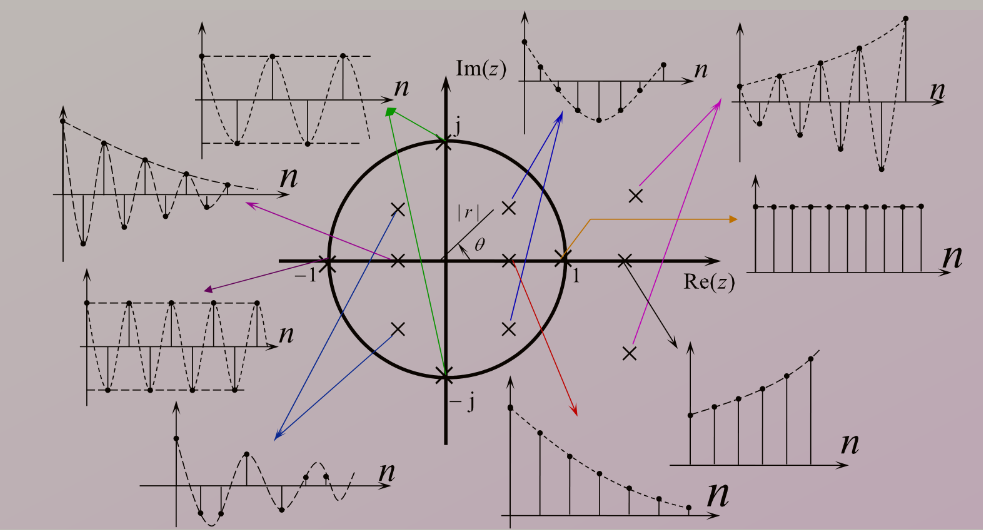
2 系统函数的零极点分布对系统特性的影响
离散系统的H(z)的零极点与 h(k)的关系:







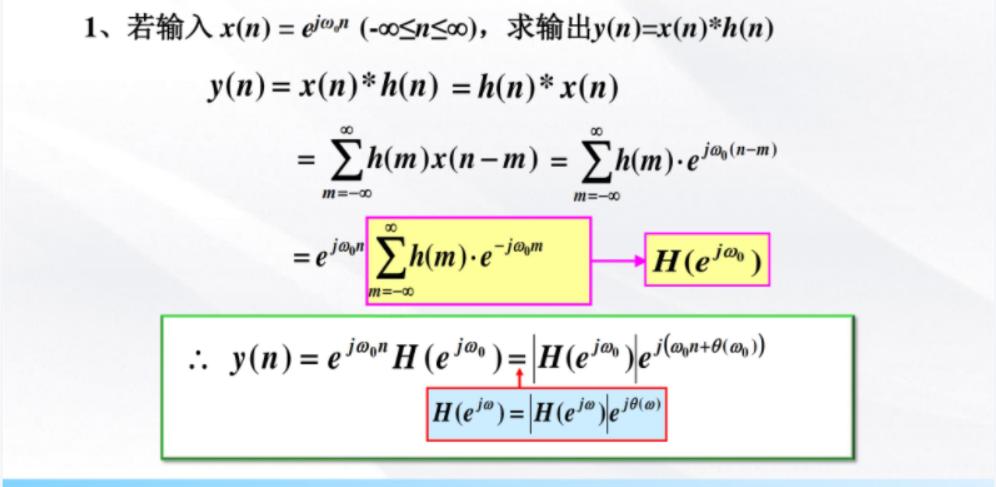
3 频率响应
数学意义:
系统频率响应是系统的单位脉冲响应的傅里叶变换,是系统函数在单位圆上的值。
问题:频率响应的物理意义?




深入理解:分幅频响应和相频响应



时域卷积定理证明:





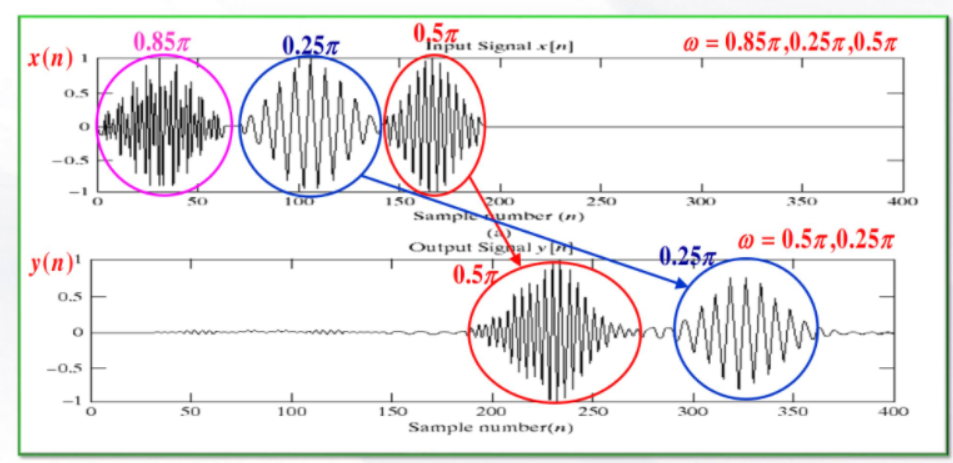
固定频率输入信号下的系统输出

案例分析:
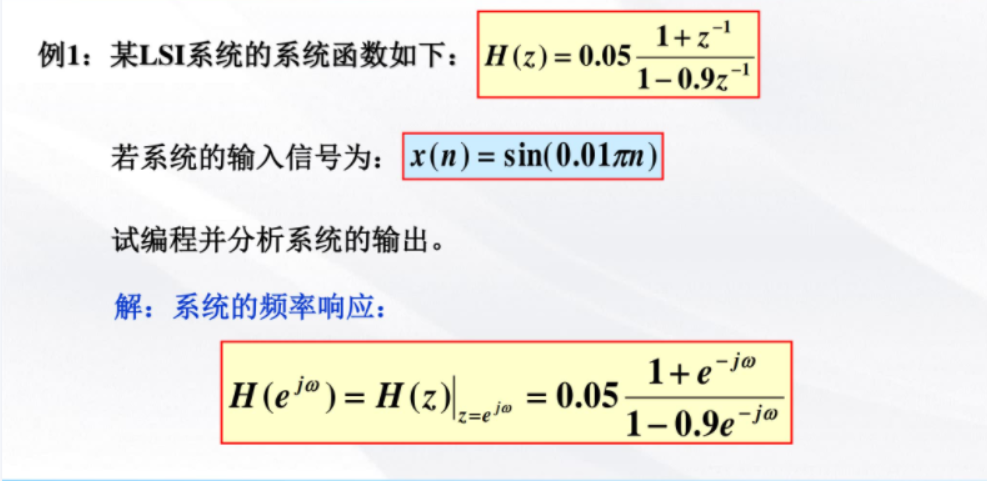


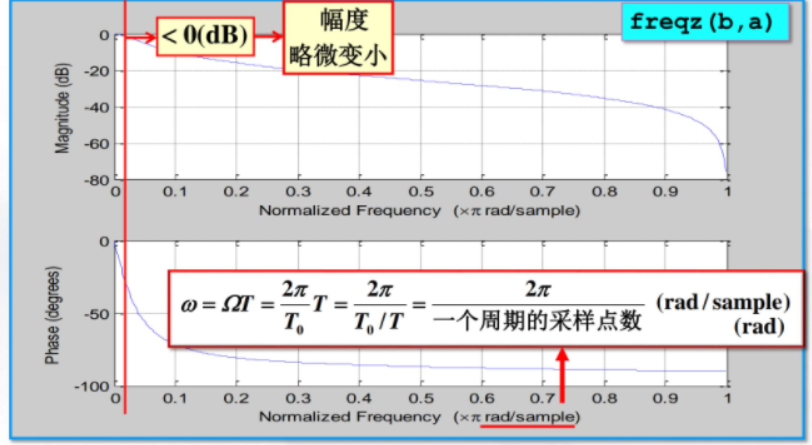
sample没有单位,最后还是弧度的单位。


等比序列求和的方式,特殊的配凑,为了幅频与相频分开。

为了使得幅频响应全为正,对相频做“手脚”,相频分段加了π,因此补了负号。

4 系统的频率响应的几何确定法

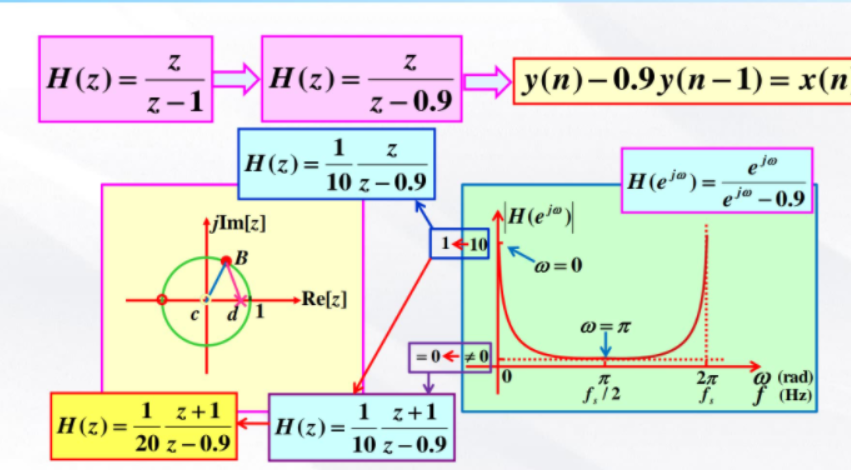
引入:累计器系统的的分析



累加和系统的改造:因为不稳定。
且最大幅度归一化。
LSI系统频率响应的几何确定法:
因式分解






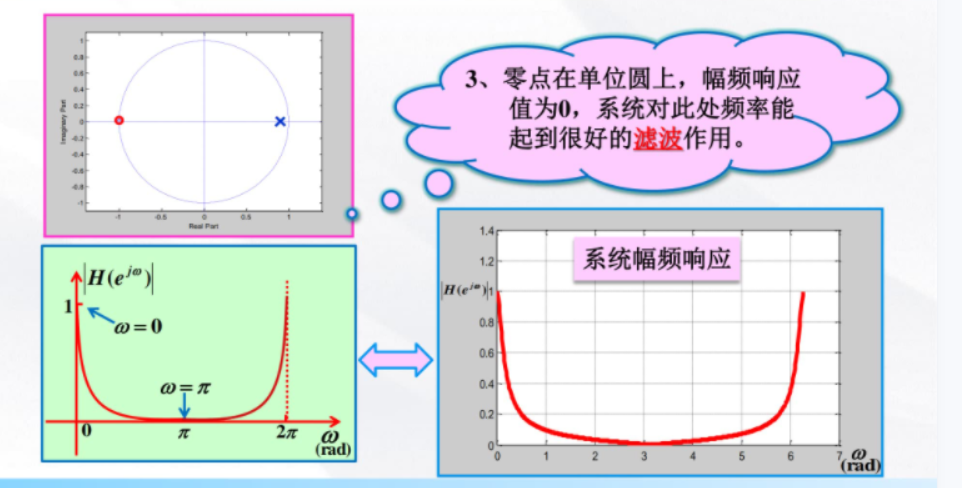
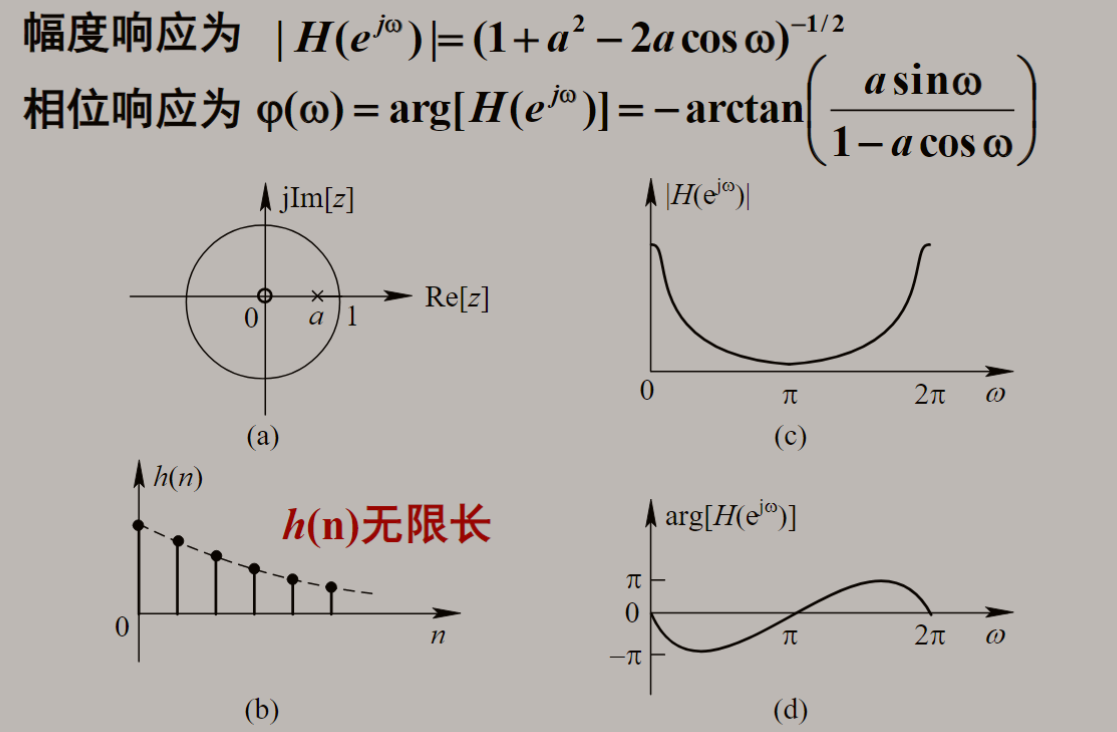
零极点位置与系统频率响应的关系小结:


实例:


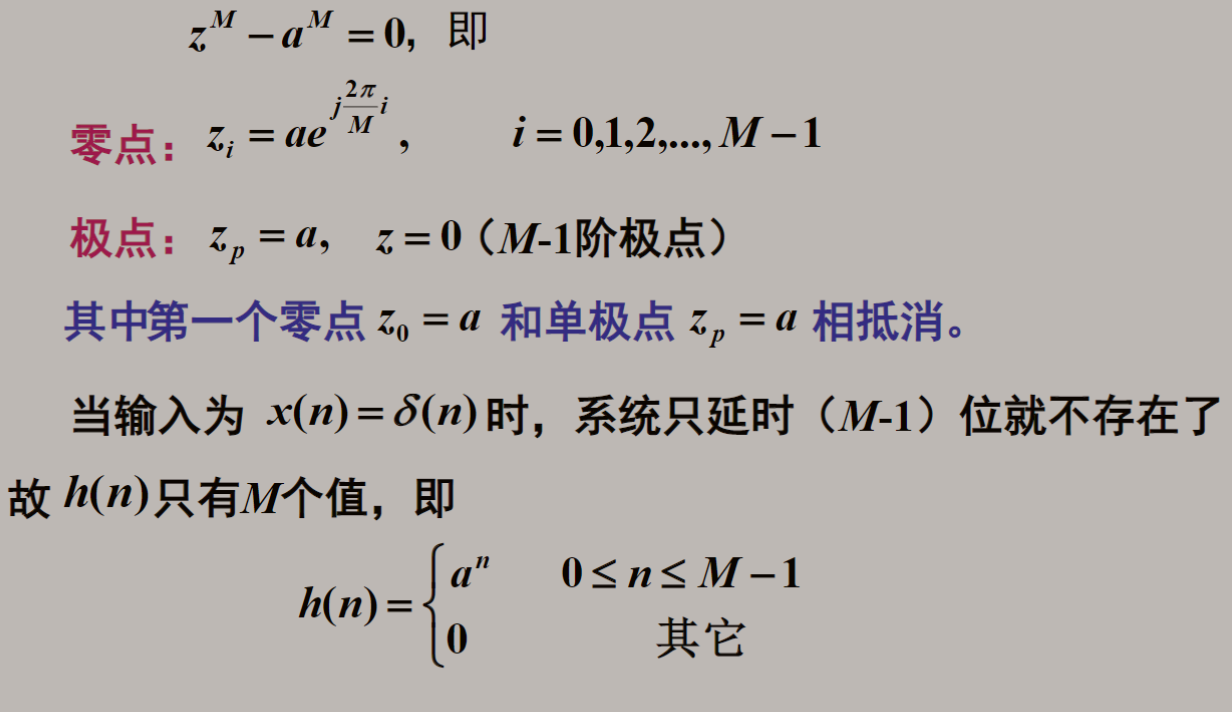
梳状滤波器:
z是复数。
峰值在两零点之间。



零极点抵消,7个零点,少1个。

5 IIR系统与FIR系统的概念
IIR系统与FIR系统的引出:


没有反馈回路,只有前向。
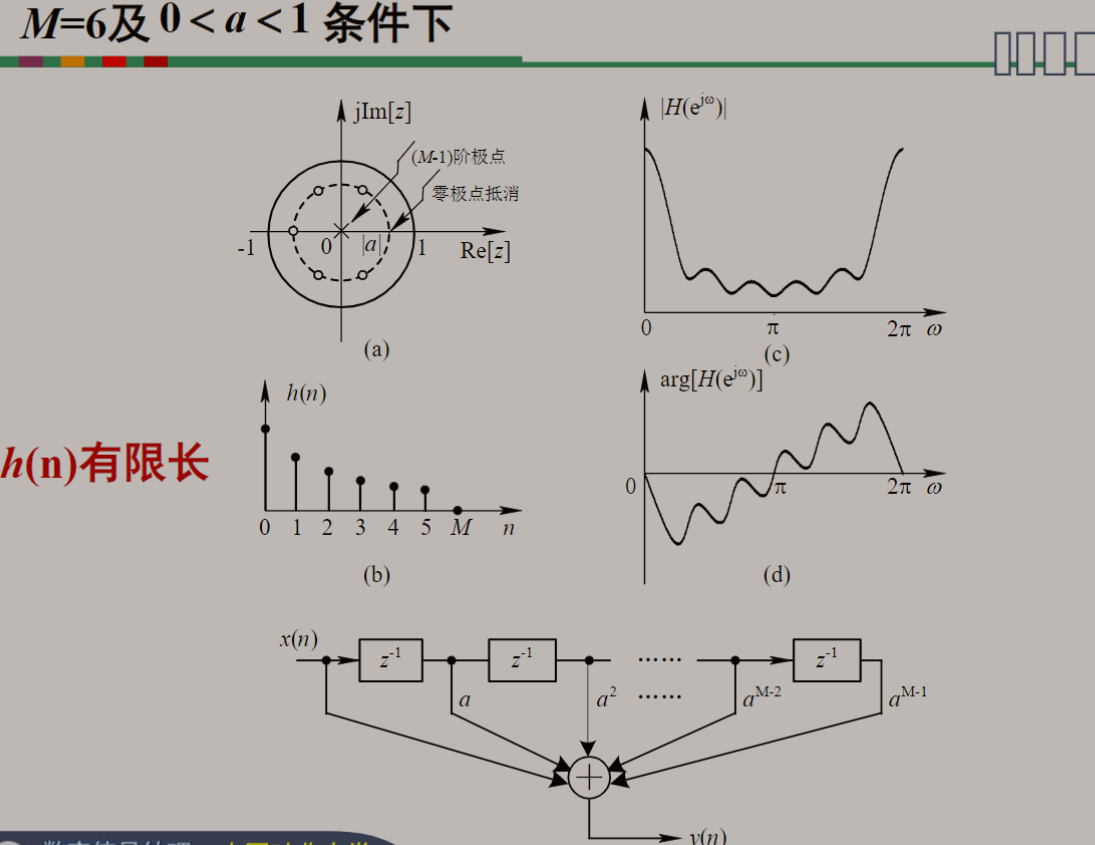
IIR系统与FIR系统:


此时系统函数至少有一个非零极点。















 5972
5972











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









