







 本文介绍了避障传感器的工作原理,如何通过电位器调节灵敏度,并提供了Arduino接线图和实验代码示例,展示了传感器在无阻和有障碍物时LED状态的变化,可用于智能小车避障等应用。
本文介绍了避障传感器的工作原理,如何通过电位器调节灵敏度,并提供了Arduino接线图和实验代码示例,展示了传感器在无阻和有障碍物时LED状态的变化,可用于智能小车避障等应用。
资料下载
链接:https://pan.baidu.com/s/1OfaxDexNl3Lwj1GnbxnQnw?pwd=lx88
1.1 项目介绍:
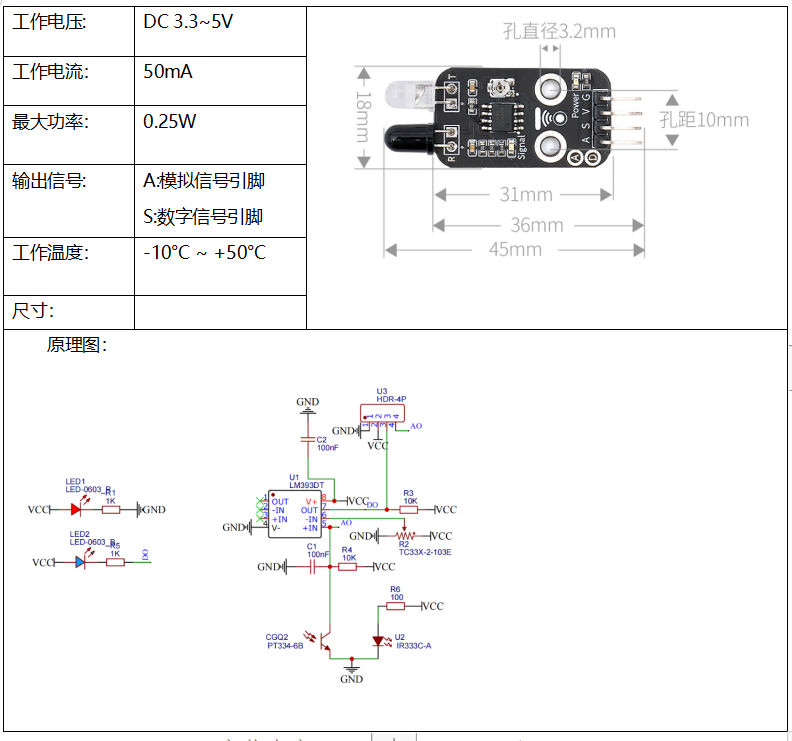
避障传感器感应到物体时信号端S输出0,未感应到时信号端S输出1。它可通过调节电位器用来调节感应灵敏度。它速度快,适合智能小车避障、黑白线循迹、防跌落等。传感器自带2个3mm定位孔,方便你将传感器固定在其他设备。
1.2 模块相关资料:
1.3 实验组件:

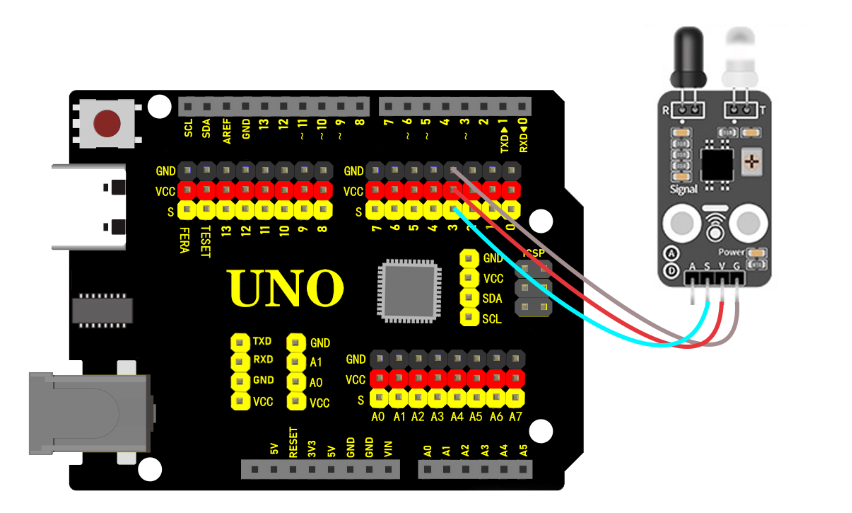
1.4模块接线图:
1.5 实验代码:
/*
避障传感器
https://sourl.cn/HAZnEH
*/
int sensorPin = 3; //定义数字口13
int ledPin = 13; //定义数字口3
int sensorState = 0; //定义数字变量sensorState,并设为0
void setup()
{
pinMode(ledPin, OUTPUT); //将ledPin设置为输出
pinMode(sensorPin, INPUT);//将sensorPin设置为输入
}
void loop()
{
sensorState = digitalRead(sensorPin);
//读取到数字口3的数值,并赋值给sensorState
if (sensorState == LOW) //当sensorState为低电平时,LED亮起
{
digitalWrite(ledPin, HIGH);//LED亮起
}
else
{
digitalWrite(ledPin, LOW);//LED变暗
}
}
1.6实验结果:
按照上图接好线,烧录好代码,上电后,通电后,靠近红外发射头的电位器顺时针调到尽头,再调节靠近红外接收头的电位器,观察D1灯,使D1灯关闭,并且保持将要亮起的临界点,此时感应距离最长。没有障碍物挡住红外避障传感器时,红外避障传感器上的D1灯关闭,板上的 D13 的指示灯关闭;当用障碍物挡住红外避障传感器,红外避障传感器上的D1灯亮起,板上的 D13 的指示灯亮起。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











