






一、 总览
BM3D是2007年TIP的文章,题目是Image denoising by sparse 3D transform-domain collaborative ltering,论文、项目的地址是http\://www.cs.tut.fi/\~foi/GCF-BM3D/,提供matlab代码;http://www.ipol.im/pub/art/2012/l-bm3d/为C++的实现,这篇论文里面有对BM3D实现的更为详细的说明。
处理灰度图的BM3D以及它的变体CBM3D(彩色图)、VBM3D(时域)是图像去噪领域公认的去噪效果(PSNR)最好的,而BM4D、VBM4D等也都是沿袭BM3D的基于块处理(block-wise estimate)的思想,但其计算时间复杂度极大,或许只能用于离线处理(offline),当然后续有文章进行优化(代码、算法),这里就不再提及。
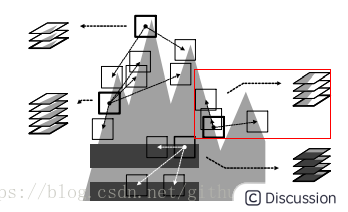
找相似块,得到块集合
BM3D算是NLM(non-local mean)的升级版本,因为它主要用到了非局部块匹配的思想,首先找相似块,不同于传统NLM使用L2距离,它用了硬阈值线性变换(见节二-2)降低了L2距离的复杂度;找到相似块后,NLM是做一个均值处理,而BM3D则是将相似块域转换,提出Collaborative filtering降低相似块自身含有的噪声(NLM做均值,引入了相似块的噪声)(见节二-2),并在aggregation处对相似块加权处理(见节二-3),得到降噪后的目标块。
BM3D的复杂之处在于,首先找相似块,其次是采用了两次block-wise estimate,复杂度相比NLM翻了1倍,且含有域变换操作。
二、 算法说明
1. 流程图
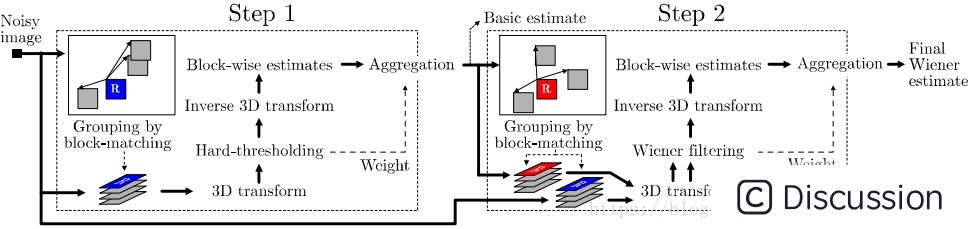 \ 分为两步,Basic estimate与Final estimate,两步除Collaborative filtering不同外,其余子步骤近似。其中:
\ 分为两步,Basic estimate与Final estimate,两步除Collaborative filtering不同外,其余子步骤近似。其中:
-
S1 Basic estimate:
-
S11 Block-wise estimate
-
S111 Grouping 为目标块找到相似块,块集合无顺序限制;
-
S112 Collaborative hard-thresholding 使用某种域变换方法,得到“变换后的相似块集合”,采用协同(由相似块共同确定)硬阈值策略“弱化”相似块的噪声,后反变换回原始块域;
-
S12 Aggregation 加权平均相似块(S112处理后),叠加后得到basic estimate后的目标块;
-
-
S2 Final estimate:
-
S21 Block-wise estimate
-
S211 Grouping 使用S111步的块集合,以及已由S1处理后的图像重新计算块集合
-
S212 Collaborative Wiener filtering 域变换后,使用维纳滤波
-
S22 Aggregation
-
2. S111 Grouping 找相似块
本文使用L2距离判断,采用a normalized 2D linear transform与hard-thresholding对块距离进行预处理操作,公式如下:\  \ 因为含有噪声的图像,计算L2距离,噪声使两个相似块的差异变大,可能找到错误的相似块。\ 其中,
\ 因为含有噪声的图像,计算L2距离,噪声使两个相似块的差异变大,可能找到错误的相似块。\ 其中,
- x为像素点,X为图像
 目标块,
目标块,  搜索块
搜索块 是S1中的块大小
是S1中的块大小 硬阈值操作,阈值设为
硬阈值操作,阈值设为
 是归一化后的二维线性变换
是归一化后的二维线性变换
根据距离就可以找到相似块集合,由式(5)所示,\  \ 其中,
\ 其中,
 确定是否相似的超参数
确定是否相似的超参数 为
为  的相似块集合
的相似块集合
3. S112 Collaborative hard-thresholding 相似块降噪
此处使用归一化的3D线性变换(normalized 3D linear transform) 来降低相似块的噪声,然后使用反变换
来降低相似块的噪声,然后使用反变换  得到S112步处理后的相似块
得到S112步处理后的相似块  ,如下式(6)所示,\
,如下式(6)所示,\  \ 其中,
\ 其中,
 为归一化的3D线性变换,
为归一化的3D线性变换,  为其反变换
为其反变换 硬阈值操作,阈值设为
硬阈值操作,阈值设为 
 为处理后的相似块集合
为处理后的相似块集合
a) 为什么要这么做
文中ⅡC中提到,传统方法,如NLM,由空域得到近似块,然后对近似块的每个像素一一对应去平均,作为目标块每个像素的值。但是,上述策略对于如下场景并不合适:
i. 某些相似块拥有的噪声更小,相比其它相似块,该块的“权重”应更大,而不是简单取平均
ii. 相似块图像信息冗余,从空域上看,两个有重叠区域的相似块,简单平均会造成目标块信息重复。
因此采用“Collaborative ltering by shrinkage in transform domain”的方式,能够加强相似块的稀疏性,同时降低相似块的噪声。\ 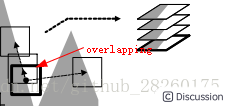
4. S12 Aggregation 加权生成目标块
同样是为了降低相似块的信息冗余与自身噪声,所以我认为与S112的目的一致。加权平均后得到目标块的像素值,如式(12)(10)所示:\ 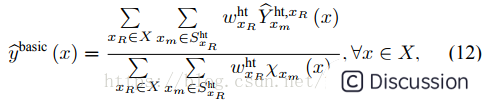

其中,
 为权重
为权重 为公式(6)硬阈值操作后的非0系数的个数
为公式(6)硬阈值操作后的非0系数的个数 ,在实际搜索相似块时,需要对原图padding,由padding得到的相似块不纳入加权平均中
,在实际搜索相似块时,需要对原图padding,由padding得到的相似块不纳入加权平均中
5. S211 Grouping
由S1初步处理后的图像,重新计算L2距离,得到相似块集合,此处不再使用硬阈值处理,公式如式(7)所示:

其中,
 为S2步的判断是否相似的超参数
为S2步的判断是否相似的超参数 为相似块集合
为相似块集合
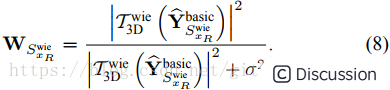
6. S212 Collaborative Wiener filtering
由S211步得到的相似块集合  ,经过某个域变换后,使用维纳收缩系数(Wiener shrinkage coefcients)
,经过某个域变换后,使用维纳收缩系数(Wiener shrinkage coefcients)  加权,后经过反变换,得到块集合
加权,后经过反变换,得到块集合  。如式(9)、(8)所示。
。如式(9)、(8)所示。
 \
\ 
7. S22 Aggregation
S12已经说明过了,S22与S12近似,公式如式(11)所示,而最终结果,与式(9)的计算步骤一致。

三、 结论
1. 加速
在实际操作中,为加快BM3D的计算速度,在寻找相似块的步骤后,得到的块实际上已经进行了2D变换处理,然后再加上一个1D变换(文中使用1D-Haar离散小波变换),成为3D变换,使用2D+1D的变换方法替代直接3D变换。
2. 难点
文中提到的2D变换与各种超参数,并没有一个确定值,对于真实视频去噪,使用的2D变换与超参数可能与文章实验设置不同,因此需要进行微调,也就是需要大量实验的积累。
最终的去噪结果如下图所示,可以发现,噪声被很好地去除了,图像边缘保留完整,图像纹理得到了很好的还原。\  \ 但这些都是自行添加高斯白噪声产生的测试图像,若实际运用在图像降噪中,原始图像不会有这么多噪声,因此就不需要BM3D两步去噪。那么可以将BM3D的两步拆开,采用前步的硬阈值、2D变换寻找相似块、1D变换升至3D域再加权平均,或后步直接使用维纳滤波,或许就已经有很好的效果了。
\ 但这些都是自行添加高斯白噪声产生的测试图像,若实际运用在图像降噪中,原始图像不会有这么多噪声,因此就不需要BM3D两步去噪。那么可以将BM3D的两步拆开,采用前步的硬阈值、2D变换寻找相似块、1D变换升至3D域再加权平均,或后步直接使用维纳滤波,或许就已经有很好的效果了。
下一步会总结BM4D、VBM4D的东西。
四、 C-BM3D
针对彩色图,本文将图像的RGB色彩空间转换为YUV色彩空间,因为YUV的Y分量拥有较其余分量更多的图像信息(边缘、材质、纹理等),并且拥有更高的SNR(信噪比),而U、V分量拥有更多的低频信息。\ 因此对于C-BM3D,本文使用Y分量搜寻相似块,U、V分量使用Y分量的相似块位置信息。\ 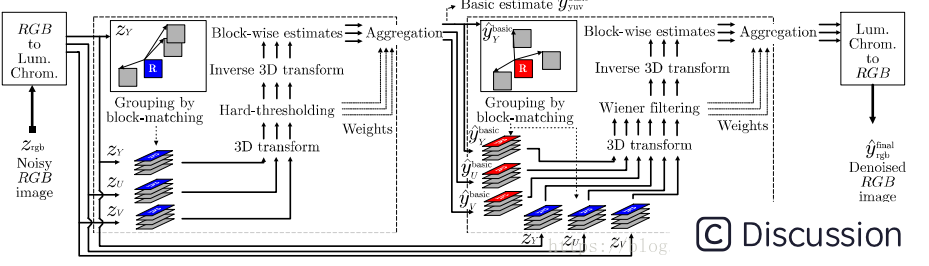 \ 可以仿照他转换色彩空间、从Y分量搜索相似块的方法,来对彩色图像进行降噪处理。
\ 可以仿照他转换色彩空间、从Y分量搜索相似块的方法,来对彩色图像进行降噪处理。
五、 VBM3D
对于视频去噪,一是可以将视频转化为单帧图像,然后使用图像去噪算法对单帧进行处理,然后融合还原成已去噪的视频;二是根据视频前后帧信息,某个像素点,前帧没有噪声,或噪声较少,那么就可以作为后帧的值,但视频中物体是运动的,如果按前后帧的同一位置的像素处理是不合理的,因此会引入运动补偿、跟踪的算法,对于实时处理来说,条件就有点苛刻。
VBM3D不含运动补偿,对中间帧的目标块搜索相似块,搜索对象是前后帧与中间帧,提出了predictive-search block-matching(PS-BM) ,用于前后帧的相似块搜索。具体而言,PS-BM,先以中间帧的目标块为中心、搜索半径NS的区域寻找相似块,然后在该块对应的前后帧的位置为中心、搜索半径NPR的区域寻找相似块,中间帧、前后帧的相似块构成块集合。其余步骤与BM3D无异。\ 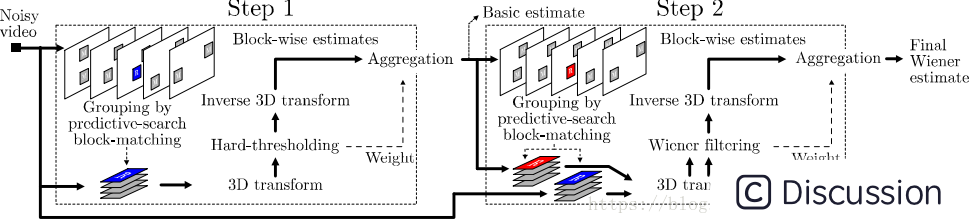
html
``` clear all;clc ;
pauseTime = 1;
filePaths = 'cameraman256.png';
noise_leval = [10,15,20,25,30,35,40,45,50,55,60,65,70];
for i = 1:length(noise_leval)
PSNRs = [];
SSIMs = [];
sigma = noise_leval(i);
for j = 1:length(filePaths)
y = imread(filePaths);
if length(size(y)) > 2
y = rgb2gray(y);
end
y = im2double(y);
z = y + (sigma/255)*randn(size(y));
% 生成噪声图像
[PSNR,SSIM,y_est] = BM3D(y, z, sigma, 'np', 0);
PSNRs(j) = PSNR;
SSIMs(j) = SSIM;
imshow(cat(2,im2uint8(y),im2uint8(z),im2uint8(y_est)));
title([num2str(sigma),num2str(PSNR,'%2.2f'),'dB',' ',num2str(SSIMs(j),'%2.4f')])
drawnow;
pause(pauseTime)
end
disp(['sigma:', sigma,' psnr:', mean(PSNRs),' ssim:', mean(SSIMs)]);
end ```
















 768
768











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











