







 本文综述了柔性作业车间调度问题的研究现状,包括单目标和多目标调度,以及不确定环境下的调度问题。研究方法涉及数学规划、启发式算法和人工智能技术,如遗传算法、禁忌搜索和模拟退火。此外,文章讨论了调度问题的评价指标和析取图模型,并列举了常用的目标函数。未来的研究趋势聚焦于混合算法和应对动态环境的调度策略。
本文综述了柔性作业车间调度问题的研究现状,包括单目标和多目标调度,以及不确定环境下的调度问题。研究方法涉及数学规划、启发式算法和人工智能技术,如遗传算法、禁忌搜索和模拟退火。此外,文章讨论了调度问题的评价指标和析取图模型,并列举了常用的目标函数。未来的研究趋势聚焦于混合算法和应对动态环境的调度策略。
1 柔性作业车间调度问题的研究现状
“柔性”是相对于“刚性”而言的,传统的==“刚性”自动化生产线主要实现单一品种的大批量生产==。而==“柔性”生产线可以在较短的生产周期内,生产出较低成本、较高质量的不同品种产品==。柔性一般主要包括:机器柔性、工艺柔性、产品柔性、维护柔性、生产能力柔性、扩展柔性和运行柔性等。
1.1 单目标柔性作业车间调度
FJSP的目标函数一般包括:最大完工时间最小、总完工时间最小、最大负荷的机器负荷最小、提前/拖期惩罚最小、设备空闲时间最小等。单目标FJSP只是针对其中一个目标进行优化,最常见的是最大完工时间最小。Hurinl、Chen、Kacem利用GA,以最大完工时间最小为目标求解FJSP。Neifar将插入式启发式方法和GA混合进行求解。Pezzella采用多种交叉方法和多种变异方法混合的GA求解FJSP,取得了较好的优化结果。Scrich、Zribi等利用TS求解总拖期最小的FJSP。zhao利用GA,同时引入虚拟和真实工序的概念对拖期最小的FJSP进行求解。Wu利用多代理方法对提前/拖期最小进行优化。Imanipour、Guimaraes求解带有独立时间约束的FJSP问题。Saidi-Mehrabad在考虑有独立安装时间的情况下利用TS对FJSP进行了研究。Rossi在考虑安装时间的情况下增加了运输时间的条件,利用蚁群算法进行求解,直接考虑车间实际的生产情况。Zribi考虑资源约束情况下的FJSP,对机器资源的使用进行研究。天津大学的张维存采用蚁群算法与遗传算法混合的方法,对能力约束下的FJSP进行研究,以设备的最小空闲时间为目标。浙江工业大学的王万良采用改进的蚁群算法,提出机器选择规则,对信息素进行调整使得快速搜索全局最优解。Mastrolilli对FJSP的邻域结构进行研究,设计出较好的邻域结构,对利用TS求解FJSP影响较大。Ong利用免疫算法同时结合无性选择原则求解FJSP,取得了较好的效果。上海理工大学的柳毅将免疫算法与遗传算法相结合求解FJSP。Najid以改进的模拟退火为主,结合启发式规则对FJSP进行了研究。Jansen提出一种线性时间近似算法,对固定了机器数和工件数的抢占式和非抢占式两种情况下的FJSP进行研究。Xu设计一种离散神经网络结合瞬时混沌(transient chaotic)方法进行求解。Imanipour建立混合整数模型,设计了两种版本的TS算法,对文中产生的带有交货期的实例进行求解。杨晓梅、余琦玮、陈皓和席位东等分别利用改进的GAGA对FJSP的最大完工时间进行优化。中国科学技术大学的卢冰原和谷峰对模糊环境下的FJSP进行了研究,模糊加工时间用三角模糊数表示,优化目标是最大完工时间,并且在卢冰原的博士论文中研究了加工时间不确定的模糊环境下柔性作业车间调度问题。谷峰将病毒机制引入遗传算法中,以增强局部搜索能力,来克服遗传算法早熟和收敛慢的缺点。
1.2 多目标柔性作业车间调度问题
实际中的调度问题通常不止一个优化目标,而需要同时考虑多个性能指标,因此在研究柔性作业车间调度问题的过程中,很多学者把研究的方向转向了多目标柔性作业车间调度问题。多目标柔性作业车间调度问题和单目标柔性作业车间调度问题相比,存在以下几个问题.
(1)目标之间具有不可公度性也就是说不同目标的取值范围和量纲常常不同。
(2)目标之间存在矛盾性也就是说目标之间可能相互冲突,一个目标的性能得到改善的同时可能导致其他目标性能的恶化
唐国春已经证明,如果问题1‖γ1是NP难的,那么多目标调度问题1‖(γ1,γ2)和线性权函数的多目标调度问题1‖αγ1+βγ2也是NP难的。
Brandimarte将分派规则与禁忌搜索结合求解多目标FJSP,首先用分派规则求解机器选择问题,然后利用禁忌搜索求解调度问题。Kacem等采用局部启发式方法进行初始化,再利用GA对初始解进行多目标优化。Kacem等利用模糊集的概念处理目标的关系,根据Pareto解的多样性进行Pareto前沿解的优化。Kacem设计初始化方法,提出最坏边界分析来估算启发式方法产生调度方案的性能。Ho和Tay利用GP算法对分派规则进行组合并应用于FJSP问题,随后利用CDRs方法,结合文化算法提出GENACE;接着又提出LEGA;综合以上方法采用CDRs、遗传算法和学习机制对三个目标函数进行优化求解。Vilcot采用TS与GA相混合的方法对最大完工时间和延迟成本两目标进行优化。南京航空航天大学的潘全科等采用小脑模型对多目标调度系统进行了研究。Zribi等采用分步法,首先采用定位法和禁忌搜索确定最佳机器选择方案,再采用GA求解工序调度问题。Tamaki等提出混合整型规划建模FJSP,问题特征包括机器的安装准备工件时间,并采用GA算法进行优化。Saad等利用Chouquet积分方法对各个目标进行决策分析再综合,设计多目标GA算法,考虑更多的目标进行优化。上海交通大学的夏蔚军等研究了基于粒子群优化与模拟退火混合方法解决多目标FJSP,其中粒子群优化求解机器选择问题和模拟退火求解排序问题。西北工业大学的吴秀丽和余建军以GA为主结合免疫算法等局部搜索算法求解多目标问题。Liu将变邻域搜索和PSO算法进行混合优化。Gao分别在遗传算法加入移动瓶颈和变邻域搜索方法,增强局部搜索能力,实验结果表明混合算法的可行性和有效性。Wang和陈亮等提出过滤定向搜索方法对多个规则及多个目标的权重进行不同深度和广度的搜索,取得了良好的效果.
1.3 不确定环境下柔性作业车间调度问题
随着全球经济一体化程度的不断加深,国际竞争日趋激化,产品更新换代的速度越来越快,不可预测的竞争环境的变化,使得企业生产通常面临很多不确定性因素,如工件的到达时间具有不确定性、工件实际的加工时间具有模糊性、客户交货期具有模糊性等,即生产过程中不可预料的事件具有动态性。目前,很多不确定性制造系统中的调度问题集中在动态的事件处理、不确定的加工时间和交货期综合起来的柔性作业车间调度问题。
动态调度的概念出现较早,Jackson在1957年便对静态调度和动态调度的概念做了区分。在不同文献中,动态调度有时也称为反应调度、自适应调度等。Suresh等对动态调度事件分成了四类:与工件相关,与机器相关,与工序相关,其他事件等。Matsuura首先用分支定界法产生一个调度,当工况发生变化时,再用调度规则来分配工件。Abumizar等提出一种重调度算法,当扰动发生时,仅仅重新调度那些直接或间接受扰动影响的工件,从而减少由于扰动引起的全局改变。Liu等利用仿真的方法进行动态调度研究。Sim等利用神经网络专家系统确定各子网的输入,进行车间动态调度研究。Chu等提出一种基于神经网络和仿真的鲁棒自适应调度器。Jones等提出一种解决实时排序和调度问题混合方法的框架,但只是一个框架而已。Lee等利用遗传算法和机器学习来解决单机车间的动态调度问题。Jian等提出一种FMS的调度和重调度算法,考虑了四种动态事件,即机器损坏、订单优先级提高、订单插入和订单取消。Kouiss等利用多Agent方法,对车间中每个加工中心配备一个Agent,用于解决对应加工中心内的调度问题。南京航空航天大学的潘全科等改进调度策略,对车间动态调度问题进行研究。上海交通大学的杨红红根据建立的动态数据库管理模块和GA模块,并引入约束解决机制,对动态环境下的调度问题进行研究。上海交通大学的李岩论述了综合事件机制及时间机制优点的动态调度机制,通过重调度修订工序集,以减少人为干预。西北工业大学的余建军采用免疫模拟退火混合算法,利用基于概率突跳特性的爬山性能来避免早熟。随着模糊数学的发展及模糊数学规划思想在调度领域的成功应用,很多研究人员对具有模糊加工时间和模糊交货期的模糊调度问题展开了研究。IshiiH.等首次提出用模糊数表示交货期,对开环车间的双机调度问题和并行机调度问题进行了研究。HanS.等人研究了具有模糊交货期的单机调度问题。WangG.Y.等对具有模糊加工时间的带有准备时间的单机调度问题进行了研究。PengJ.和LiuD.B.对具有模糊加工时间的并行机调度问题进行了研究。IshibuchiH.等人研究了模糊流水车间调度问题,对模糊流水车间中的模糊加工时间问题进行了描述。TsujimuraY.等运用遗传算法求解了具有模糊加工时间的作业车间调度问题。王玮和汪定伟研究了制造业中的模糊交货期下的准时化生产计划问题。MurataT等研究了具有模糊交货期的多目标调度问题。AdamopulosG.I等人提出了一种基于邻域搜索的混合方法。求解了具有模糊交货期和加工时间不确定的单机调度问题。LamS.S.和CaiX.对模糊交货期下带有非线性附加惩罚的单机调度问题进行了研究。吴悦和汪定伟研究了模糊加工时间的单机提前/拖期调度问题。王成尧等对多个工件叠加的联合隶属函数所对应的性质进行了研究,并提出了一种具有模糊加工时间的单机调度模型。王成尧和汪定伟对具有模糊加工时间的最迟开工时间单机调度问题进行了研究,给出了问题在特殊情况下的最优解,并给出了一般情况下获得最优解的必要条件。Linf.T对具有模糊加工时间的单件作业车间调度问题进行了研究,对确定型的单件作业车间调度问题进行了模糊化处理。从现有研究来看:有关模糊流水车间调度问题的研究较多,但也主要集中在模糊交货期方面;对具有模糊加工时间的调度问题的研究大部分还停留在描述性阶段;将模糊加工时间和交货期一起考虑的调度研究还很少。
2 柔性作业车间调度问题的研究方法
从Johnson揭开调度问题研究的序幕以来,调度问题一直是极其困难的组合优化问题,调度模型从简单到复杂,研究方法也随着调度模型的变迁从开始的数学方法到启发式的智能算法。目前解决调度问题的方法主要分为两类:精确方法(exact method)和近似方法(approximation method)。精确方法也可称为最优化方法,能够保证得到全局最优解,但只能解决较小规模的问题,而且速度很慢。近似方法求解时,可以很快地得到问题的解,但不能保证得到的解是最优的,不过对于大规模问题是非常合适的,可以较好地满足实际问题的需求。下图为近年来求解调度问题的主要研究方法。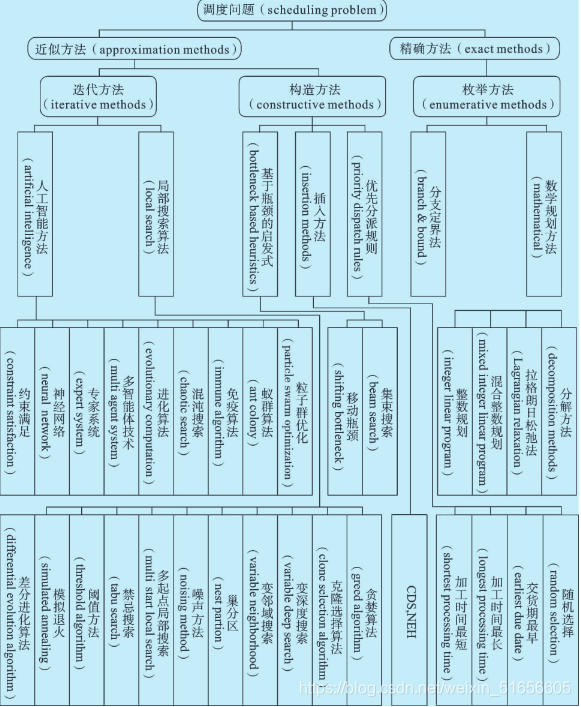
2.1 精确方法
精确方法主要包括整数规划、混合整数规划、拉格朗日松弛法、分解方法及分支定界法等。
1.数学规划方法
数学规划方法中求解调度问题的最常见方法是混合整数规划。混合整数规划有一组线性约束和一个线性目标函数,该方法限制决策变量都必须是整数。导致在运算中出现的整数个数以指数规模增长,即便使用更好更简洁的公式表述,也需要大量的约束条件。较多成功的数学模型的建立都归功于拉格朗日松弛法(Lagrangian relaxation)和分解方法(decomposition method)。拉格朗日松弛法用非负拉格朗日乘子将工艺约束和资源约束进行松弛,最后将惩罚函数加入目标函数中。上海交通大学的刘学英用拉格朗日松弛法解决车间调度问题。分解方法将原问题分解为多个小的易于解决的子问题,然后对子问题寻找最优。
2.分支定界法
分支定界法(branch&bound,B&B)用动态树结构来描述所有的可行解排序的解空间,树干的分支隐含有要被搜索的可行解。Balas在1969年提出基于析取图的枚举算法是最早应用于调度问题求解的B&B方法。B&B非常适合解决总工序数小于250的问题,对于大规模的调度问题,它需要很多的计算时间,限制了它的使用。目前,对这种方法研究的重心是如何与智能算法相结合,减少最初的搜索阶段中的节点,提高搜索效率和求解效果。
2.2 近似方法
1.构造方法
构造方法主要包括优先分派规则法、插入方法和基于瓶颈的启发式方法等。
优先分派规则法(priority dispatch rules,PDR)是最早的近似方法。该方法给所有的被加工工序分派一个优先权,然后优先权最高的加工工序被最先选出排序,接下来按优先权次序依次进行排序。该方法非常容易实现,而且计算复杂性低,在实际的调度问题中常常被使用。Panwalkar和Iskander对各种不同规则进行了归纳和总结。在实际中常用的规则有SPT、LPT、EDD、MOR和FCFS等。大量该领域的研究表明:对于大规模的车间调度问题,多种优先分派规则组合起来使用更具有优势;另外,该方法具有短视的缺点,如它只考虑机器的当前状态和解的质量等级等问题。
一般而言,基于瓶颈的启发式方法(bottleneck based heuristic BBH)主要包括瓶颈移动方法(shifting bottleneck procedure ,SBP)和射束搜索方法。SBPP是目前求解调度问题最有效的构造方法之一,由Adams在1988年提出,也是第一个解决FT10标准测试实例的启发式算法。SBP的主要贡献是:提供了一种用单一机器确定将要排序的机器的排序途径。用SBP实际求解时,把问题化为多个单一机器问题,每次解决一个子问题,把每个子问题的解与所有其他子问题的解比较,每个机器依解的好坏排列,有着最大下界的机器被认为是瓶颈机器。而单一机器问题的排序用Carlier的方法通过迭代来解决,这个方法可以快速给出一个精确的解。当每次瓶颈机器排序后,每个先前被排定的有改进能力的机器,通过解决单一机器问题的方法,再次被局部重新最优化。虽然SBP可以得到比优先分派规则法质量更好的解,但是计算时间较长,而且实现比较复杂。
2.人工智能方法
主要包括:约束满足技术、神经网络、专家系统、多智能体技术,以及后来人们通过模拟或揭示某些自然现象、过程和规律而发展的元启发式算法(如遗传算法、免疫算法、蚁群优化算法和粒子群优化算法等)。
约束满足(constraint satisfaction,CS)是指通过运用约束来减少搜索空间的有效规模的方法。这些约束限制了选择变量的次序和分配到每个变量可能值的排序,在一个值被分配给一个变量后,不一致的情况被剔除。去掉不一致的过程称为一致性检查(consistency checking),但是这需要进行回访修正。当所有的变量都得到分配的值,并且不与约束条件冲突时,约束满足问题就得到了解决。Pesch和Tetzlaff指出,该方法只是在一定程度上给调度者高水平的指导方针,较少应用于实际调度。
神经网络(neural networks ,NN)通过一个Lyaplmov能量函数来构造网络的极值,当网络迭代收敛时,能量函数达到极小,使与能量函数对应的目标函数得到优化。用NN解决旅行商问题(TSP)是其在组合优化问题中最成功的应用之一。Foo和Takefuji最早提出用Hopfield模型求解车间调度问题。之后大量研究人员进行了改进性研究。除了Hopfield模型之外,BP(back propagation)模型也较多地应用于求解车间调度问题。Remus最早利用BP模型求解调度问题,之后大量研究人员对此模型进行研究。目前,神经网络仅能解决规模较小的调度问题,而且计算效率非常低,以至于不能较好地用于求解实际大规模的调度问题。
2.3 专家系统
专家系统(expert system,ES)是指一种能够在特定领域内模拟人类专家思维来解决复杂问题的计算机程序。专家系统通常由人机交互界面、知识库、推理机、解释器、综合数据库和知识获取等六个部分构成。它将传统的调度方法与基于知识的调度评价相结合,根据给定的优化目标和系统当前状态,对知识库进行有效的启发式搜索和并行模糊推理,避开烦琐的计算,选择最优的调度方案,为在线决策提供支持。比较著名的专家系统有:ISIS,OPIS,CORTES,SOJA等。由于专家系统需要丰富的调度经验和大量知识的积累,使得开发周期较长,成本昂贵,对新环境的适应能力较差,因此专家系统一般对领域的要求非常严格,非常特定。
为了解决复杂问题,克服由于单一的专家系统所造成的知识有限、处理能力弱等问题,出现了分布式人工智能(distributed artificial intelligence,DAI)。多个智能体的协作正好符合分布式人工智能的要求,因此出现了多智能体系统(multi-agent system,MAS)。由于MAS对开放和动态的实际生产环境具有良好的灵活性和适应性,因此MAS在实际生产中不确定因素较多的车间调度等领域中获得越来越多的应用。不过,MAS和专家系统具有相同的不足:需要丰富的调度经验和大量知识的积累等
进化算法(evolutionary algorithm EA)通常包括遗传算法(genetic algorithm GA)、遗传规划(genetic programming,GP)、进化策略(evolution strategies ES)和进化规划(evolutionary programming EP)。它们都是模仿生物遗传和自然选择的机理,用人工方式构造的一类优化搜索算法。侧重点不一样,GA主要发展自适应系统,是应用最广的算法;EP主要求解预期问题;ES主要解决参数优化问题。1985年,Davis最早将GA应用到调度问题,通过一个简单的20×6的车间调度问题验证了采用GA的可行性。此后,Falkenauer和Bouffouix进一步改进提高。1991年,Nakano首先将GA应用到了一系列的JSP的典型问题中。Yamada和Nakano在1992年提出了一种基于Giffler和Thompson的算法GA/GT。自Holland教授1975年提出GA以来,国内对其在求解车间调度问题的文献非常多,其中清华大学的王凌和郑大钟较好地对GA及其在调度问题中的应用进行了分析和总结
蚁群优化算法(ant colony optimization ACO)是意大利学者Dorigo等于1991年提出的,模拟蚂蚁在寻找食物过程中发现路径的行为。蚂蚁在寻找食物过程中,会在它们经过的地方留下一些化学物质“外激素(stigmergy)”或“信息素(pheromone)”,这些物质能被同一蚁群中后来的蚂蚁感受到,并作为一种信号影响后来者的行动,而后来者也会留下外激素对原有的外激素进行修正,如此反复循环下去,外激素最强的地方形成一条路径。Colorin等首先将蚁群优化算法求解车间调度问题,国内也有许多学者进行此方面研究。蚁群优化算法在求解复杂组合优化方面有一定的优越性,不过容易出现停滞现象,收敛速度慢。
粒子群优化(particle swarm optimization PSO)算法由Eberhart博士和Kennedy博士在1995年提出,源于对鸟群捕食行为的模拟研究。在PSO算法中,系统初始化为一组随机解,称为粒子。每个粒子都有一个适应值表示粒子的位置,还有一个速度来决定粒子飞行的方向和距离。在每一次迭代中,粒子通过两个极值来更新自己:一个极值是粒子自身所找到的最优解,称为个体极值;另一个极值是整个种群目前找到的最优解,称为全局极值。PSO算法在车间调度中的应用国内研究较多,作者在PSO算法应用方面做了大量工作。PSO算法最初应用于连续问题优化,如何较好的离散化应用于组合优化问题是一个研究热点.
3 局部搜索算法
局部搜索(local search,LS)是人们从生物进化、物理过程中受到启发用于求解组合优化问题的方法,是从早期的启发式算法变化而来的。以模拟退火、禁忌搜索为代表,应用广泛。局部搜索必须依据问题设计优良的
邻域结构,产生较好的邻域解来提高算法的搜索效率和能力。
3.1 模拟退火
模拟退火(simulated annealing ,SA)是Kirtpatrick等在1983年提出的,源于模拟退火的过程并且结合Metropolis准则。模拟退火算法在进行局部搜索过程中,当某个解的目标函数值即使变坏时,仍可以采用Metropolis准则以一定的概率接受新的较差解或继续在当前邻域内搜索,以免陷入局部最优解,整个过程由一个称为温度的参数t来控制。Laarhoven和Matsuo在1988年首先将SA算法用于求解车间调度问题。此后Laarhoven对SA算法进行改进,取得了较好的求解结果。由于SA算法是一般的随机搜索算法,搜索过程没有记忆功能,求解调度问题时不能非常迅速地得到较好解。不过,SA算法与其他算法相结合可以增强局部搜索能力,可以在结果和计算时间上都有明显改善
禁忌搜索(tabu search,TS)由Golver和Hansen在1986年提出。TS在运行时,按照某种方式产生一个初始解,然后搜索其邻域内的所有可行解,取其最优解作为当前解。为了避免重复搜索,引入了灵活的存储结构和相应的禁忌准则(即禁忌表和禁忌对象);为了避免陷入局部最优,而引入特赦准则,允许一定程度地接受较差解。1996年,Nowicki和Smutnicki设计了一种基于关键路径的邻域结构,对用TS算法求解调度问题影响非常大。TS算法求解速度快而且应用较为广泛,然而它依赖于问题模型和邻域结构等,可以与其他算法结合提高局部搜索能力。
除了上述方法以外,还有很多种方法对调度问题进行求解,如Petri网和仿真调度法、文化算法(cultural algorithm,)、DNA算法、Memetic算法、分散搜索(scatter search)等。每一种算法都有一定的优势,却也存在一定的缺点,如何将它们取长补短的混合在一起进行使用是当前及未来研究的热点.
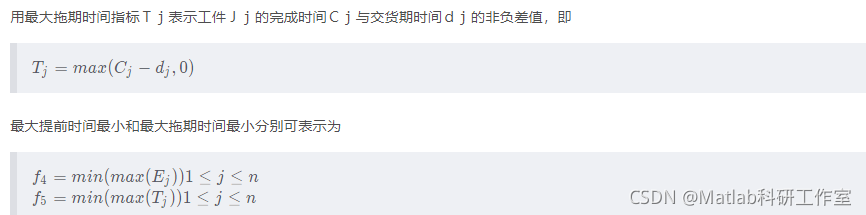
3 FJSP评价指标
在FJSP的求解过程中,调度方案优劣的评价需要通过一定的目标函数来判断,目标函数也就是常用的评价指标。FJSP不仅包括经典JSP的评价指标,而且还有其他的评价指标。如下为文献中常

4 FJSP的析取图模型
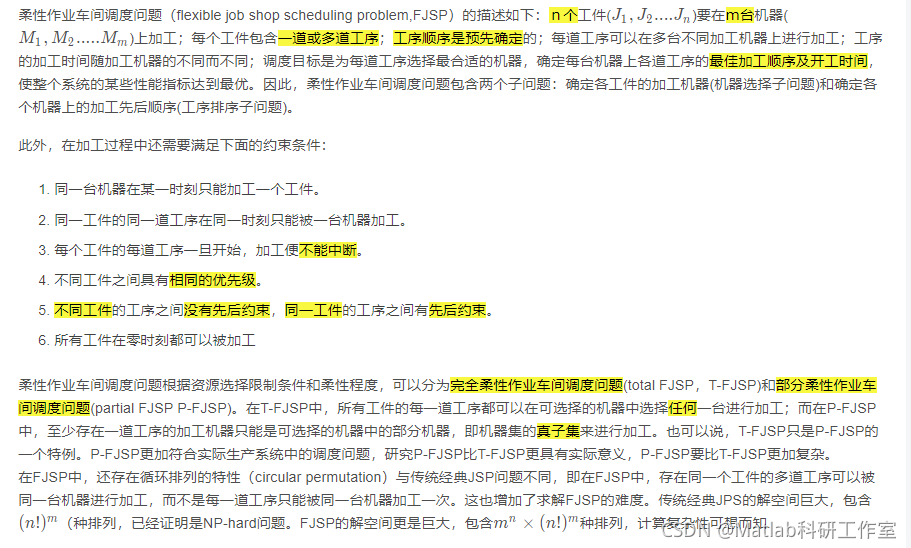
在FJSP中,存在循环排列的特性,即同一个工件的多道工序可以在同一台机器上连续或间隔加工。当FJSP中每道工序确定了加工机器之后,即转变为一般的作业车间调度问题。而析取图(disjunctive graph)模型是描述车间调度问题的一种重要形式。
析取图模型定义
G=(N,A,E)
- N是所有工序组成的节点集,其中0和*表示两个虚设的起始工序和终止工序,每个节点的权值等于此节点工序在对应机器上的加工时间
- A是连接同一个工件的邻接工序间的有向弧集,表示工序之间的先后加工顺序约束
- E是连接在同一台机器上相邻加工工序间的析取弧集。
下图是三个工件、三台机器和九道工序。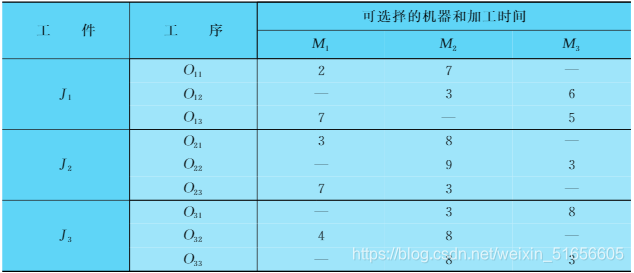

5 柔性作业车间调度问题描述


















 442
442

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











