







文章目录
一、读、写队列
如下图所示,我们通过控制台查看RocketMQ默认创建的Topic配置时,发现Topic属于哪个Broker、读写队列数量等。perm:2不能订阅不能写 4 能订阅 不能写 6:能订阅能写

我们可以通过${user_home}/store/config/Topics.json文件查看到Topic的配置
"TopicTest":{
"order":false,
"perm":6,
"readQueueNums":4,
"topicFilterType":"SINGLE_TAG",
"topicName":"TopicTest",
"topicSysFlag":0,
"writeQueueNums":4
}
队列介绍:
写队列是会真实创建存储文件的,负责数据的写入。读队列会记录consumer消费的offset,负责消息的读取,这其实是一种读写分离思想,然后MessageQueue会根据路由策略选择对应的队列进行写和读,所以读写队列的数量是比较关键的。
通常情况下读队列和写队列是一一对应的,因为在往写队列里写Message时,会同步写入到一个对应的读队列中。
- 如果写队列比读队列多时:因为读写队列是一一对应的,如果写比多时,那么就会导致一些写队列中的一些无法被消费掉,造成消息积压和丢失。
- 读队列比写队列多时:这样就会导致读队列没有消息写入,如果一些消费者分配到了这些没有消息的读队列,就会导致一些consumer的空转,造成性能的浪费
二、消息持久化
RocketMQ的消息是直接是在磁盘上保存的,我们可以通过默认路径${user_home}/store下查看都有哪些文件,并且简单介绍一下这些文件分别有什么作用

这里存储文件主要分为三个:
-
Commitlog:主要存储消息的元数据,commitlog内会有多个大小为1G的文件组成,所有生成的消息都会按照顺序存入到commitlog文件中,这样的好处就是可以减少查找目标文件的时间,消息落盘非常快。对比kafka文件,还需要寻找消息所属partition文件,然后在完成写入,但是当Topic比较多时,这样的寻找partition就会浪费比较长时间。
然后因为每次消息的大小不是固定的,所以每次写入commitlog时都会判断当前commitlog 文件空间是否足够,如果不够就会重新创建一个commitlog文件,文件名为当前消息的偏移 量。 -
Consumerqueue:存储消息在commitlog的索引,可以由下图可以看出文件内部存储的是每个Topic下每个队列的信息,主要记录这些Messagequeue被哪些消费者组消费到了哪一条commitlog。但是消费者的消费进入是存储在config/consumeroffset.json文件中
文件结构是由30w个大小为20byte的数据块组成,每个数据块内容有msgPhyoffset(消息在文件中的其实位置)+msgsize(消息在文件中的长度)+msgTagCode(消息tag的hash值)

-
index:提供了一种通过key或者时间区间来查询消息的方法
另外几个文件主要起到辅助作用: -
Checkpoint:主要记录commitlog、consumequeue、index这些文件最后一次刷盘的时间戳
-
Config:主要记录一些关键配置,例如上面介绍Topic的配置,还有消费者组的配置、消费者组偏移量offset等信息

-
abort:存在的意义就是判断程序是否是正常关闭的(例如:服务器宕机等),如果是这不存在,如果不是这存在。后续可以通过这个文件来判断上次如果是非正常关闭的,就会做一些数据恢复的操作。
整体消息存储结构

构建消息文件:
RocketMQ会启动一个定时任务ReputMessageService定时调用(间隔1ms)来生成consume queue和index
此处有一个关键参数:reputFromOffset
消息允许重复:reputFromOffset = commitlog的提交指针
消息不允许重复:reputFromOffset = commitlog中内存的最大偏移量
三、高效文件写
我们从上面可以看出消息是最终写入到commitlog中,那么RocketMQ文件写入相对于普通的文件写入做了哪些优化呢?
3.1 零拷贝
零拷贝是操作系统为了加速文件读写提供的一种操作机制,使用零拷贝确实可以提升IO操作的性能,在Java语言层面总共有mmap和sendFile两种方式。
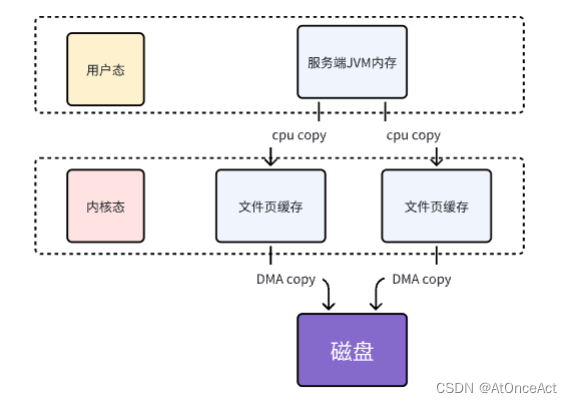
3.1.1 CPU拷贝和DMA拷贝
在讲解mmap方式我们要先介绍一下CPU拷贝和DMA拷贝。
-
CPU拷贝
在操作系统层面,内存空间可以分为用户态和内核态,用户态是无法直接操作操作系统硬件资源的(网卡、磁盘),需要进行用户态到内核态的转换的。但是进行转换后,那么用户态当时的数据就需要复制到内核态,那这些操作就是有CPU来进行任务的分配和调度的,所以当发生大量数据读写时CPU的占用率就会比较高。

-
DMA拷贝
由上图所示,为了防止IO操作过多,让CPU调度被占用。所以就引入了DMA(直接存储器操作),由DMA来负责这些频繁IO操作,DMA是一套操作指令值,不会占用CPU的计算资源,这样CPU就不用参与具体的数组复制操作,只需要管理DMA的权限就行。这样可以极大的释放CPU的性能,这样的拷贝速度会比CPU拷贝快很多。

并且DMA也在不断的优化,因为引入DMA拷贝后,虽然CPU不需要参与具体的数据复制工作,直接由DMA就可以完成,但是复制过程中需要数据总线(DMA控制器和内存之间、以及DMA控制器和外设之间传输数据的通道),过了反之占用过多的数据总线,就引入了channel通道的方式。channel是一个完全独立的处理器,专门负责IO操作,channel有自己的IO指令与CPU无关,所以channel更适合IO操作,性能更高。
Java中的零拷贝相关的操作都是通过channel的子类来实现的,而所谓的零拷贝并不是不拷贝,而是减少了copy的次数。
3.1.2 mmap文件映射
由上文我们知道所谓的零拷贝就是减少文件copy的次数,而mmap文件映射就是减少copy次数的一种方式。主要是通过nio包下java.nio.channels.FileChannel的map方法完成映射。
JAVA中可通过FileChannel的map方法创建内存映射文件。在Linux服务器中由该方法创建的文件使用的是操作系统的pagecache,即页缓存。
-
普通读写
我们可以从下图可以虽然内核态到磁盘的copy虽然优化成了DMA copy,但是用户态到内核态的copy还是CPU拷贝。那么零拷贝考虑的优化就是用户态到内核态的copy
-
mmap映射
上面cpu copy每次复制的都是存储的文件内容的copy,而mmap的copy只是保存文件的映射(文件的内存地址、文件大小),所以真实的数据也不需要在用户态进行留存,直接通过操作映射在内核态完成数据复制
暂时无法在飞书文档外展示此内容
这个过程是在操作系统完成的,在Java代码层是无法直观看到的,我们可以通过看JDK源码,在JDK的nio包里,java.nio.HeapByteBuffer映射的就是一块JVM内存(会通过byte[]数组缓存数据),所有的读写都是通过直接操作byte[],这个是没有使用零拷贝的普通读写。
public ByteBuffer put(int i, byte x) {
hb[ix(checkIndex(i))] = x;
return this;
}
而在JDK的nio包里,另一个java.nio.DirectByteBuffer包里,则映射的一块堆外内存,在DirectByteBuffer里,并没有用一个数据结构来保存数据内容,而是保存了一个内存地址,所有的读写操作都是通过unsafe魔法值直接交于内核完成,这个就是mmap的读写机制。这种机制适合小文件,如果文件过大映射信息也会过多,容易造成问题。
public ByteBuffer put(int i, byte x) {
try {
UNSAFE.putByte(ix(checkIndex(i)), ((x)));
} finally {
Reference.reachabilityFence(this);
}
return this;
}
3.1.3 sendFile方式
早期的sendFile方式是通过cpu copy来进行页缓存与socket缓存区的数据拷贝,后期的优化中并不会直接copy文件内容,而是通过拷贝一个带有位置信息和长度新的文件描述符FD,这样就减少了需要拷贝的数据,而真是的数据通过DMA,从页缓存打包异步发送到socket。在Linux2.6.33版本以前out_fd只能是一个socket,现在版本已经没有了这个限制。

3.2 顺序写
- 随机写:通常程序往磁盘写文件时都是随机写,因为磁盘空间不是连续的,会有碎片,所以我们去写一个文件时也没法把一个文件写到一个连续的磁盘空间中,所以为了写文件其中有大量的寻址操作,会严重影响了性能。
- 顺序写:而顺序写是先在磁盘提前申请一块连续的空间,为了避免大量的寻址操作,所以可以直接在之前写入的地址后面追加就可以了。
而RocketMQ选择的就是顺序写,我们可以通过源码中org.apache.rocketmq.store.CommitLog # DefaultAppendMessageCallback的doAppend方法,这个方法就是以追加的方式写入到一个堆外内存byteBuffer中,然后通过FileChannel写入磁盘
3.3 刷盘时机
在操作系统中通常不会直接写入到磁盘中,而是会先写入到一个缓存pageCache中。但是这些操作对于应用程序来说相当于已经落盘成功了,可以进行修改、查看、复制等操作,但是page cache依旧是内存状态,因为还没有落盘。如果在还没落盘前,如果操作系统发生宕机,那么这些信息就可能丢失。而将数据从pageCache写入到磁盘中的过程被称为刷盘。
操作系统会在某些特定的情况下才会把数据写入到磁盘,例如我们正常关机。平常pageCache中被修改过的页被称为Dirty(脏页),当脏页达到一定阈值后也会触发刷盘。我们可以通过 proc/meminfo文件查看PageCache状态。
RocketMQ刷盘机制有两种,同步刷盘,异步刷盘。
- 同步刷盘:当生产者发送消息到Broker时,在返回写成功状态前,消息写入到pageCache后,会立即通知刷盘线程进行刷盘操作,等刷盘成功后,会唤醒等待的线程,返回成功状态。
- 异步刷盘:消息只是写到了pageCache中,等积累到一定程序后在进行刷盘操作。
所以异步刷盘相对于同步刷盘来说,吞吐量更大一些,返回速度更快些,对于如何选择同步或者异步,我们可以通过更改下方broker.conf配置文件中的flushDiskType来选择。ASYNC_FLUSH代表异步,SYNC_FLUSH代表同步

四、消息主从复制
如果broker是以集群方式进行部署的话,那么主从节点的消息是怎么复制的。在RocketMQ中,通过会配置conf下的2m-2s-async等文件下文件,具体选择可以通过想配置的集群类型来选择。

- 同步复制:同步复制就是当master和slave都写入成功后,才返回写入成功状态
- 异步复制: 异步复制就是写入master后就可以返回写入成功状态,然后再异步复制给从节点。但是这样就会由一个问题就是,如果还没写入从节点成功,但是master节点故障了,那么就可以发生消息丢失
同步复制/异步复制我们可以通过broker配置文件中的brokerRole来配置,ASYNC_MASTER、SYNC_MASTER、SLAVE三个值中的任意一个。
五、过期文件删除
消息既然可以持久化,那么肯定要有对应的删除机制,下图是RocketMQ安装目录下 conf/broker.conf配置信息

- 如何判断消息是否过期
如上图可以看出对应的配置,fileReservedTime = 48,就是当文件保留时间超过48小时,就会被认为是过期文件,随时可以删除。RocketMQ判断是否过期的唯一标准就是保留时间,并不会关心文件中的消息是否被消费。 - 如何删除文件
RocketMQ内部有一个定时任务,会对文件进行扫描,并且会触发删除操作,就想配置文件中deleteWhen = 04 (默认值)就是凌晨四点进行删除,另外RocketMQ还会对服务器磁盘空间进行删除,如果使用率达到一定阈值的话也会进行删除操作。
六、负载均衡
6.1 producer负载均衡
producer发送消息时,默认会轮询目标Topic下所有的messagequeue,并采用递增取模的方式往不同的message queue发送消息,以达到消息可以平均落到不同的message queue上。

6.2 consumer负载均衡
consumer可以选择集群模式和广播模式,在不同的模式下选择也是不一样的
6.2.1 集群模式
集群模式下一条消息只需要被一个消费者组consumer group中的一个consumer实例消费,在采用拉取方式时,消费者需要指定拉取哪个message queue下的消息。
当consumer实例的数量有变化后,就会触发一次负载均衡,就会按照message queue数量和consumer数量从新分配。把message queue和消费者进行排序后,在根据不同的算法进行分配,算法总共有六种。
//源码在下面路径下,然后不同实现就是不同的策略
org.apache.rocketmq.client.consumer
public interface AllocateMessageQueueStrategy {
/**
* Allocating by consumer id
*
* @param consumerGroup current consumer group
* @param currentCID current consumer id
* @param mqAll message queue set in current topic
* @param cidAll consumer set in current consumer group
* @return The allocate result of given strategy
*/
List<MessageQueue> allocate(
final String consumerGroup,
final String currentCID,
final List<MessageQueue> mqAll,
final List<String> cidAll
);
/**
* Algorithm name
*
* @return The strategy name
*/
String getName();
}
- AllocateMessageQueueAveragely(平均分配):将所有MessageQueue平均分给每一个消费者
- AllocateMessageQueueAveragelyByCircle(轮询分配): 轮流的给一个消费者 分配一个MessageQueue。
- AllocateMessageQueueByConfig( 不分配):直接指定一个messageQueue列 表。类似于广播模式,直接指定所有队列。
- AllocateMessageQueueByMachineRoom:按逻辑机房的概念进行分配。又是对BrokerName和ConsumerIdc有定制化的配置
- AllocateMessageQueueConsistentHash。源码中有测试代码 AllocateMessageQueueConsitentHashTest。这个一致性哈希策略只需要指定 一个虚拟节点数,是用的一个哈希环的算法,虚拟节点是为了让Hash数据在换上 分布更为均匀
- AllocateMachineRoomNearby: 将同机房的Consumer和Broker优先分配在 一起
6.2.2 广播模式
因为广播模式下消息会发送到每一个订阅了Topic的consumer实例上,所以也没有对应的均衡模式。广播模式的关键是将消费者的消息偏移量不再保存在broker上,而是保存客户端中,由客户端自己维护自己的偏移量
七、消息处理
那么消费者进行消息处理时是不能保证消息100%被消费成功,那么消费失败,consumer会怎么处理呢?消费失败我们通过设置返回状态达到重试的效果。但是广播模式下是不支持重试的,即使消费失败了消息也不会重新发送,而是会继续消费新的消息。
7.1 消息重试
重试消息会进入到一个“%RETRY%”+ConsumerGroup的队列中,然后默认的重试次数是为16次
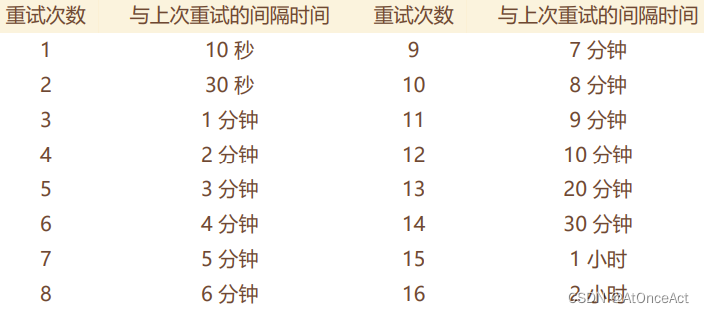
messageDelayLevel=1s 5s 10s 30s 1m 2m 3m 4m 5m 6m 7m 8m 9m 10m 20m 30m 1h 2h
7.2 死信队列
如果消息重试次数超过了最大的重试次数,那么RocketMQ就会把这个消息丢到死信队列中。RocketMQ默认的重试次数是16次。见源码 org.apache.rocketmq.common.subscription.SubscriptionGroupConfig中的retryMaxTimes属性。 这个重试次数可以在消费者端进行配置。 例如 DefaultMQPushConsumer实例中有个setMaxReconsumeTimes方法 指定重试次数。
- 一个死信队列对应的消费者组,而且会包含这个消费者组的所有死信消息,而不会区分该消息属于哪个topic
- 如果消费者组没有产生死信消息,RocketMQ就不会为其创建相应的死信队列
- 默认创建的死信队列,消息是无法被读取的,因为权限perm默认为2,如果想要被消费,需要更改perm的值















 4250
4250











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









