







最后
🍅 硬核资料:关注即可领取PPT模板、简历模板、行业经典书籍PDF。
🍅 技术互助:技术群大佬指点迷津,你的问题可能不是问题,求资源在群里喊一声。
🍅 面试题库:由技术群里的小伙伴们共同投稿,热乎的大厂面试真题,持续更新中。
🍅 知识体系:含编程语言、算法、大数据生态圈组件(Mysql、Hive、Spark、Flink)、数据仓库、Python、前端等等。
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
无人机通过图传将航拍到的图像存储并实时传送回地面站几乎已经是标配。如果想来点高级的——在无人机上直接处理拍摄的图像并实现自动控制要怎么实现呢?其实视觉跟踪已经在一些高端的消费级无人机上有了应用,不过玩现成的永远没有自己动手来劲;)。前段时间DIY了一个无人机三轴云台的视觉跟踪系统,除去云台花了¥370,本文将设计思路与实验效果分享出来。
一、基本配置
1.1 硬件
- 计算平台:树莓派3 (¥219.00)
- 摄像头:USB网络摄像头(¥108.00)
- 云台:参考上一篇博文FY650的组装
- JoyStick摇杆:用于测试和干预云台(¥8.00)
- Arduino UNO开发板:用于JoyStick输出信号的采集与AD转换并与树莓派串口通信(¥35.00)
1.2 软件
- 编程语言:Python
- 集成开发环境1:Eclipse,在windows平台上的视觉算法编程调试
- 集成开发环境2:Geany,在Linux平台上的算法与云台联调
1.3 准备知识
前面的几篇博文分别介绍了这个系统用到的基本知识:
二、设计步骤
2.1 云台调试
(1) 搭建一个用JoyStick控制云台转动的系统
因为树莓派GPIO没有模拟输入口,因此JoyStick接Arduino完成输入模拟信号的AD转换,并将转换后的信号通过串口发送给树莓派。通过这个系统结合示波器,搞清楚了所用云台转动控制的原理和控制信号特征。云台调试阶段系统连接图如下所示。最终通过树莓派的GPIO控制云台俯仰和水平转动。一开始想用Gopro作为视频采集设备,但查了很多资料也尝试了各种方法发现暂时没法实现(如果有的话请留言告诉我:),因此换了个便宜的网络摄像头。
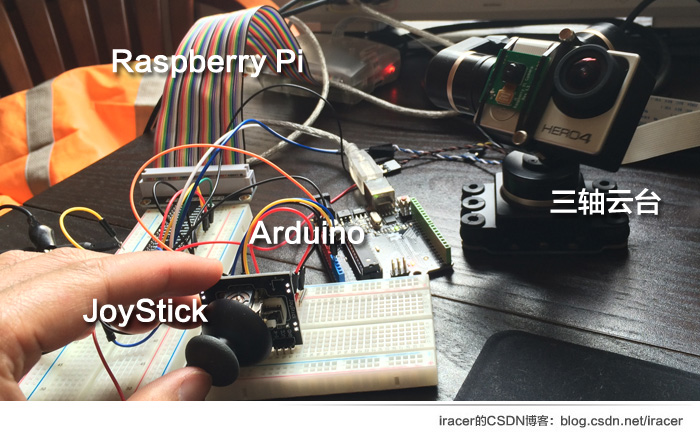

Gopro可以通过wifi将图像实时传给手机或pad,就是不能传给树莓派。
(2) 编写云台控制算法
根据上一步得到的云台控制信号特征,编写云台控制算法。输入是目标中心与图像中心的偏移量△x,△y,输出为云台俯仰、水平的控制变量dx,dy。
是的,摄像头外壳是纸糊的-_-。
2.2 算法调试
(1) 在windows平台上写跟踪算法
USB摄像头接上电脑用Eclipse写跟踪算法,输出偏差量等参数调试。
(2) 拷贝算法到树莓派调试
因为树莓派有多个GPIO可连云台,因此云台跟踪控制必须要在树莓派上调试。Python多平台部署的优点在这就体现出来了,直接将算法拷贝到树莓派即可运行调试。调试过程稍有点复杂,一开始的效果不好,耐心调,耐心改算法,效果也就慢慢出来了。

动起来的效果我们来看看下面的内容。
三、跟踪演示

http://www.tudou.com/programs/view/68JDFqex1yM/
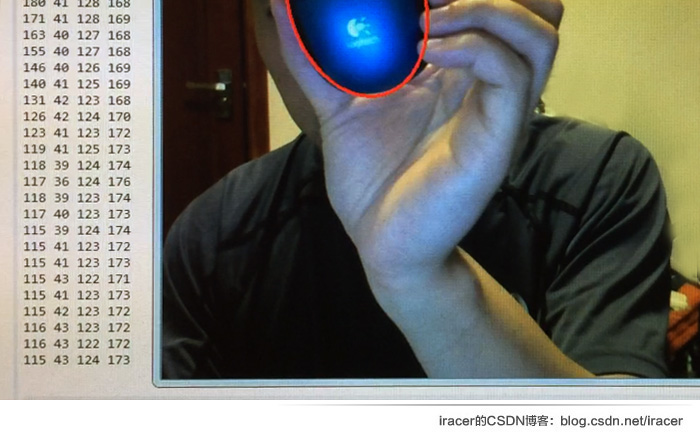
跟踪效果截图:



目前云台和摄像头已经装上650无人机,航拍时的效果还有待实验。欢迎留言或邮件iracer@163.com讨论:)

转载请注明出处(本文更新链接):http://blog.csdn.net/iracer/article/details/54837636
版权声明:本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/iracer/article/details/54837636
DIY一个基于树莓派和Python的无人机视觉跟踪系统

无人机通过图传将航拍到的图像存储并实时传送回地面站几乎已经是标配。如果想来点高级的——在无人机上直接处理拍摄的图像并实现自动控制要怎么实现呢?其实视觉跟踪已经在一些高端的消费级无人机上有了应用,不过玩现成的永远没有自己动手来劲;)。前段时间DIY了一个无人机三轴云台的视觉跟踪系统,除去云台花了¥370,本文将设计思路与实验效果分享出来。
一、基本配置
1.1 硬件
- 计算平台:树莓派3 (¥219.00)
- 摄像头:USB网络摄像头(¥108.00)
- 云台:参考上一篇博文FY650的组装
- JoyStick摇杆:用于测试和干预云台(¥8.00)
- Arduino UNO开发板:用于JoyStick输出信号的采集与AD转换并与树莓派串口通信(¥35.00)
1.2 软件
- 编程语言:Python
- 集成开发环境1:Eclipse,在windows平台上的视觉算法编程调试
- 集成开发环境2:Geany,在Linux平台上的算法与云台联调
1.3 准备知识
前面的几篇博文分别介绍了这个系统用到的基本知识:
二、设计步骤
2.1 云台调试
(1) 搭建一个用JoyStick控制云台转动的系统
因为树莓派GPIO没有模拟输入口,因此JoyStick接Arduino完成输入模拟信号的AD转换,并将转换后的信号通过串口发送给树莓派。通过这个系统结合示波器,搞清楚了所用云台转动控制的原理和控制信号特征。云台调试阶段系统连接图如下所示。最终通过树莓派的GPIO控制云台俯仰和水平转动。一开始想用Gopro作为视频采集设备,但查了很多资料也尝试了各种方法发现暂时没法实现(如果有的话请留言告诉我:),因此换了个便宜的网络摄像头。
如果你也是看准了Python,想自学Python,在这里为大家准备了丰厚的免费学习大礼包,带大家一起学习,给大家剖析Python兼职、就业行情前景的这些事儿。
一、Python所有方向的学习路线
Python所有方向路线就是把Python常用的技术点做整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照上面的知识点去找对应的学习资源,保证自己学得较为全面。

二、学习软件
工欲善其必先利其器。学习Python常用的开发软件都在这里了,给大家节省了很多时间。

三、全套PDF电子书
书籍的好处就在于权威和体系健全,刚开始学习的时候你可以只看视频或者听某个人讲课,但等你学完之后,你觉得你掌握了,这时候建议还是得去看一下书籍,看权威技术书籍也是每个程序员必经之路。
四、入门学习视频
我们在看视频学习的时候,不能光动眼动脑不动手,比较科学的学习方法是在理解之后运用它们,这时候练手项目就很适合了。
四、实战案例
光学理论是没用的,要学会跟着一起敲,要动手实操,才能将自己的所学运用到实际当中去,这时候可以搞点实战案例来学习。

五、面试资料
我们学习Python必然是为了找到高薪的工作,下面这些面试题是来自阿里、腾讯、字节等一线互联网大厂最新的面试资料,并且有阿里大佬给出了权威的解答,刷完这一套面试资料相信大家都能找到满意的工作。

成为一个Python程序员专家或许需要花费数年时间,但是打下坚实的基础只要几周就可以,如果你按照我提供的学习路线以及资料有意识地去实践,你就有很大可能成功!
最后祝你好运!!!
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









