







FPFH(Fast Point Feature Histogram)是由PFH(Point Feature Histogram)改进而来。
以下代码调用PCL库版本为1.12.1。
基于FPFH进行粗配准:
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/features/normal_3d.h>
#include <pcl/features/impl/normal_3d.hpp>
#include <pcl/features/fpfh.h>
#include <pcl/features/impl/fpfh.hpp>
#include <pcl/registration/icp.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/registration/sample_consensus_prerejective.h>
#include <pcl/point_representation.h>
int main(int argc, char** argv) {
if (argc != 3) {
std::cout << "Usage: feature_extraction_and_registration <source_cloud.pcd> <target_cloud.pcd>" << std::endl;
return -1;
}
// 加载源点云和目标点云
pcl::PointCloud<pcl::PointXYZ>::Ptr source_cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr target_cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile(argv[1], *source_cloud);
pcl::io::loadPCDFile(argv[2], *target_cloud);
// 体素化降采样
pcl::PointCloud<pcl::PointXYZ>::Ptr source_downsampled(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr target_downsampled(new pcl::PointCloud<pcl::PointXYZ>);
pcl::VoxelGrid<pcl::PointXYZ> voxel_grid;
voxel_grid.setLeafSize(0.05f, 0.05f, 0.05f);
voxel_grid.setInputCloud(source_cloud);
voxel_grid.filter(*source_downsampled);
voxel_grid.setInputCloud(target_cloud);
voxel_grid.filter(*target_downsampled);
// 计算表面法向量
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> normal_estimation;
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);
normal_estimation.setSearchMethod(tree);
normal_estimation.setRadiusSearch(0.1);
pcl::PointCloud<pcl::Normal>::Ptr source_normals(new pcl::PointCloud<pcl::Normal>);
normal_estimation.setInputCloud(source_downsampled);
normal_estimation.compute(*source_normals);
pcl::PointCloud<pcl::Normal>::Ptr target_normals(new pcl::PointCloud<pcl::Normal>);
normal_estimation.setInputCloud(target_downsampled);
normal_estimation.compute(*target_normals);
// 计算FPFH特征
pcl::FPFHEstimation<pcl::PointXYZ, pcl::Normal, pcl::FPFHSignature33> fpfh_estimation;
fpfh_estimation.setSearchMethod(tree);
fpfh_estimation.setRadiusSearch(0.2);
pcl::PointCloud<pcl::FPFHSignature33>::Ptr source_features(new pcl::PointCloud<pcl::FPFHSignature33>);
fpfh_estimation.setInputCloud(source_downsampled);
fpfh_estimation.setInputNormals(source_normals);
fpfh_estimation.compute(*source_features);
pcl::PointCloud<pcl::FPFHSignature33>::Ptr target_features(new pcl::PointCloud<pcl::FPFHSignature33>);
fpfh_estimation.setInputCloud(target_downsampled);
fpfh_estimation.setInputNormals(target_normals);
fpfh_estimation.compute(*target_features);
// 使用样本共识预射进行粗配准
pcl::SampleConsensusPrerejective<pcl::PointXYZ, pcl::PointXYZ, pcl::FPFHSignature33> sac_pr;
sac_pr.setInputSource(source_downsampled);
sac_pr.setSourceFeatures(source_features);
sac_pr.setInputTarget(target_downsampled);
sac_pr.setTargetFeatures(target_features);
sac_pr.setMaximumIterations(1000);
sac_pr.setNumberOfSamples(3);
sac_pr.setCorrespondenceRandomness(5);
sac_pr.setSimilarityThreshold(0.9);
sac_pr.setMaxCorrespondenceDistance(0.2);
pcl::PointCloud<pcl::PointXYZ>::Ptr coarse_registered_cloud(new pcl::PointCloud<pcl::PointXYZ>);
sac_pr.align(*coarse_registered_cloud);
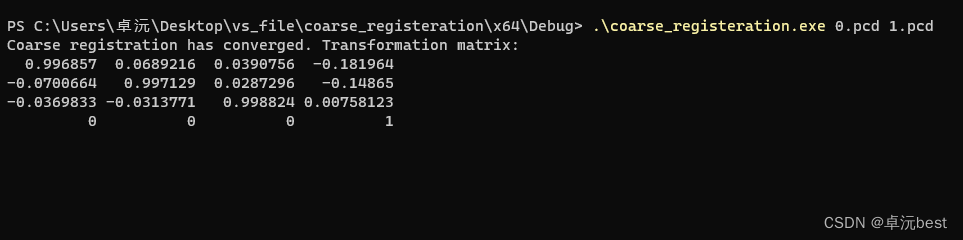
if (sac_pr.hasConverged()) {
std::cout << "Coarse registration has converged. Transformation matrix:" << std::endl;
std::cout << sac_pr.getFinalTransformation() << std::endl;
}
else {
std::cout << "Coarse registration did not converge." << std::endl;
return -1;
}
// 可视化结果
pcl::visualization::PCLVisualizer viewer("Cloud Registration");
viewer.addPointCloud(source_cloud, "original_source");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1, 0, 0, "original_source");
viewer.addPointCloud(target_cloud, "target");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 1, 0, "target");
viewer.addPointCloud(transformed_original_source, "transformed_original");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 0, 1, "transformed_original");
while (!viewer.wasStopped()) {
viewer.spinOnce(100);
}
return 0;
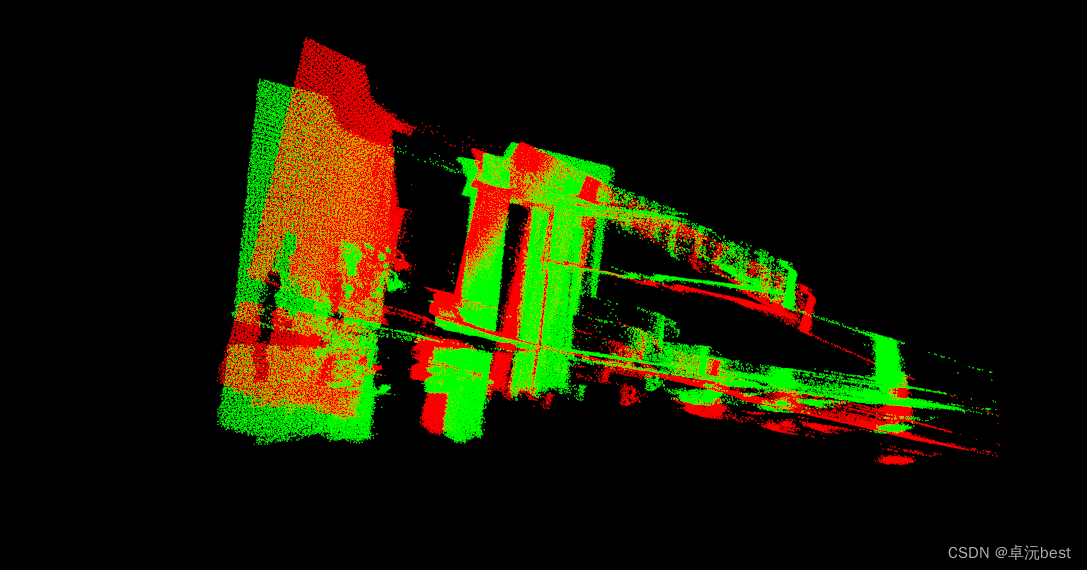
}配准前:
运行程序:
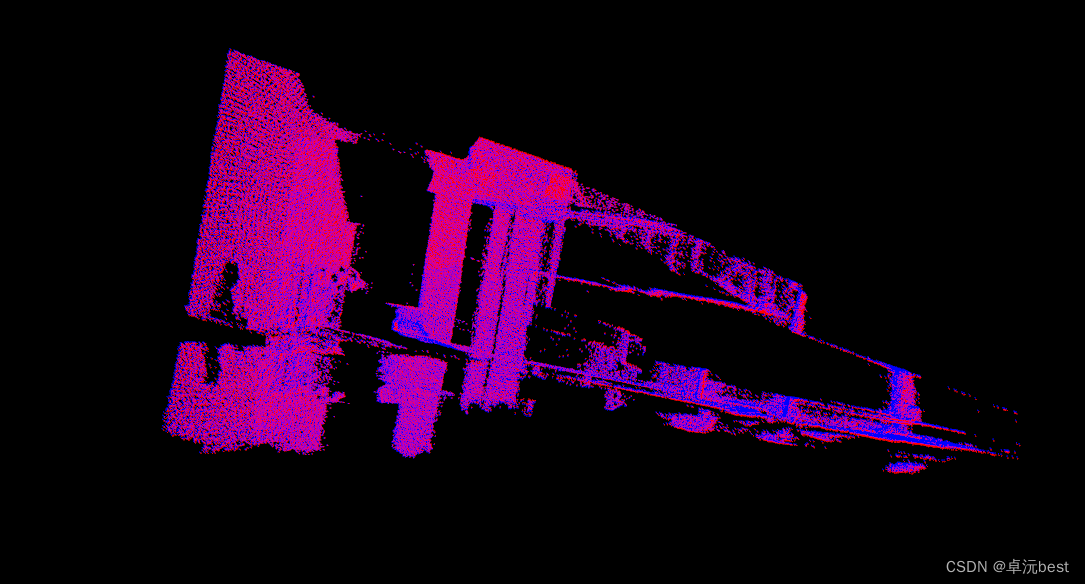
.\coarse_registeration.exe 0.pcd 1.pcd配准后:

前后对比:

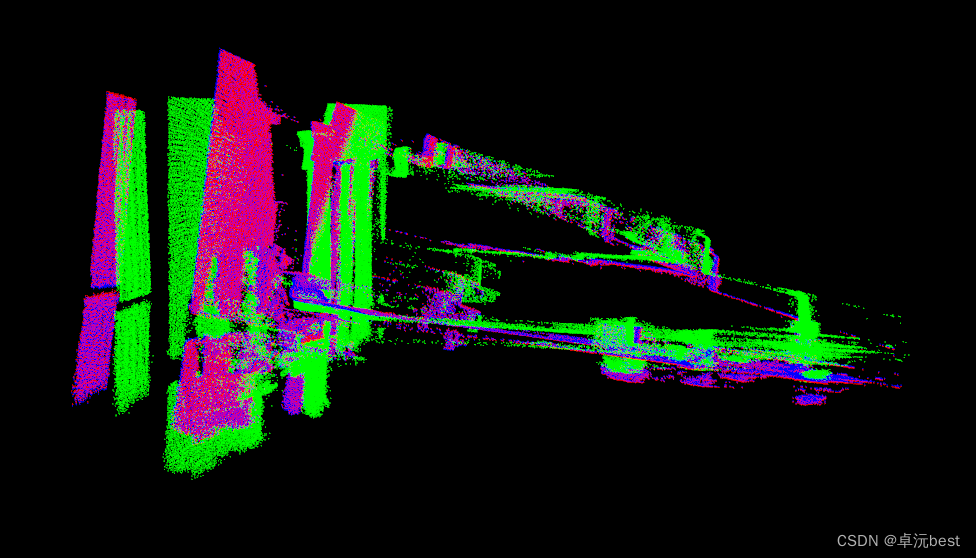
这种一般是需要两段配准,粗配准为精配准提供有利条件,提高后续精配准精度,下面加一个ICP(Iterative Closest Point)精配准看看 。
//插到粗配准程序下面
// Perform registration using ICP (Iterative Closest Point) algorithm(精配准)
pcl::IterativeClosestPoint<pcl::PointXYZ, pcl::PointXYZ> icp;
icp.setInputSource(coarse_registered_cloud);
icp.setInputTarget(target_downsampled);
icp.setMaxCorrespondenceDistance(0.2);
icp.setMaximumIterations(50);
icp.setTransformationEpsilon(1e-8);
icp.setEuclideanFitnessEpsilon(1);
pcl::PointCloud<pcl::PointXYZ>::Ptr registered_cloud(new pcl::PointCloud<pcl::PointXYZ>);
icp.align(*registered_cloud);
if (icp.hasConverged()) {
std::cout << "ICP has converged. Score: " << icp.getFitnessScore() << std::endl;
std::cout << "ICP transformation: " << std::endl << icp.getFinalTransformation() << std::endl;
}
else {
std::cout << "ICP did not converge." << std::endl;
return -1;
}结果对比:
















 467
467











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











