







项目简介
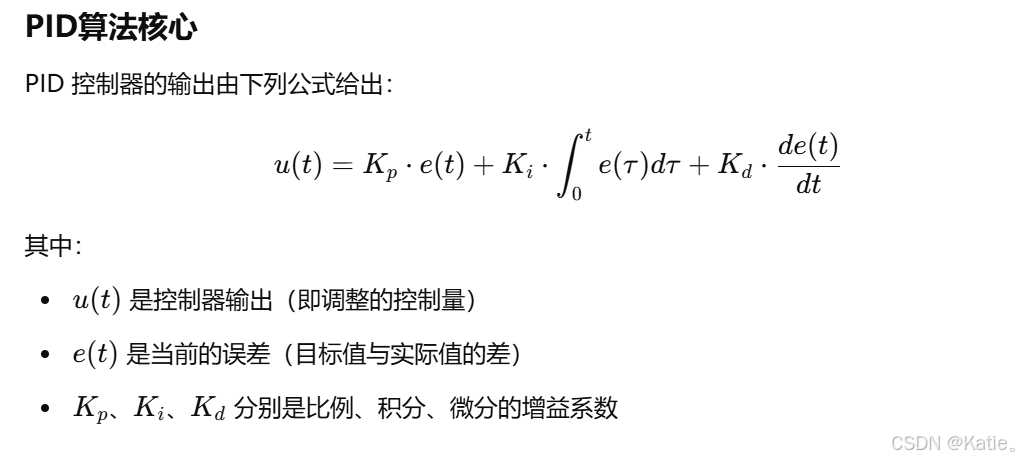
PID控制算法(比例-积分-微分控制,Proportional-Integral-Derivative)是一种常见的反馈控制算法,用于在各种自动化控制系统中实现稳定的控制。PID 控制器通过计算控制误差的三种成分:比例(P)、积分(I)、微分(D)来调节系统输出,从而使得系统的输出达到目标值。
- 比例项(P):与当前误差成正比,用于减小误差的大小。
- 积分项(I):与过去的误差累积成正比,用于消除系统长期的偏差。
- 微分项(D):与误差变化率成正比,用于预测未来的误差,并防止系统震荡。
项目目标
本项目的目标是实现一个简化版的 PID 控制算法,并通过 C++ 编写代码,模拟一个简单的控制系统。我们将实现 PID 控制器来调节系统的状态,保持其稳定并尽量使其达到目标值。
项目实现
C++代码实现PID控制器,并模拟控制目标值变化的过程,输出每个时间点的控制器输出和误差。
C++实现代码
#include <iostream>
#include <vector>
#include <cmath>
using namespace std;
// PID 控制器类
class PIDController {
public:
// PID 控制器的增益系数
double Kp, Ki, Kd;
// 存储当前的误差、误差的累计值和误差的变化率
double prevError = 0.0;
double integral = 0.0;
// 构造函数,初始化增益系数
PIDController(double _Kp, double _Ki, double _Kd)
: Kp(_Kp), Ki(_Ki), Kd(_Kd) {}
// 计算PID输出
double compute(double setpoint, double currentValue) {
// 计算误差
double error = setpoint - currentValue;
// 积分项:累积误差
integral += error;
// 微分项:误差的变化率
double derivative = error - prevError;
// PID控制公式
double output = Kp * error + Ki * integral + Kd * derivative;
// 更新前一个误差
prevError = error;
return output;
}
// 重置PID控制器的状态(误差、积分项等)
void reset() {
prevError = 0.0;
integral = 0.0;
}
};
// 仿真系统(例如温度控制系统)
class System {
public:
double currentState; // 当前状态值(例如温度、速度等)
System(double initialState) : currentState(initialState) {}
// 更新系统状态(这里模拟控制目标接近目标状态)
void update(double controlSignal) {
// 假设系统的状态变化与控制信号成正比
currentState += controlSignal;
}
};
int main() {
// PID控制器参数
double Kp = 2.0, Ki = 1.0, Kd = 0.5;
// 创建PID控制器实例
PIDController pid(Kp, Ki, Kd);
// 创建仿真系统,假设目标值是100,初始状态为0
System system(0.0);
double setpoint = 100.0; // 目标值
// 模拟过程,控制系统状态达到目标值
int iterations = 50; // 模拟50个时间步长
for (int i = 0; i < iterations; ++i) {
// 计算PID输出(控制信号)
double controlSignal = pid.compute(setpoint, system.currentState);
// 更新系统状态
system.update(controlSignal);
// 输出当前状态和控制信号
cout << "Time step " << i+1 << ": "
<< "Current State = " << system.currentState
<< ", Control Signal = " << controlSignal
<< ", Error = " << setpoint - system.currentState << endl;
}
return 0;
}
代码解读
-
PIDController类:
Kp,Ki,Kd是 PID 控制器的增益系数(比例、积分、微分系数)。prevError用于存储上一个时间步的误差,以计算微分项。integral用于存储误差的累积值,以计算积分项。compute()方法根据目标值和当前状态值计算并返回控制信号。该方法根据 PID 算法公式计算比例、积分和微分项,最终得到控制输出。reset()方法用来重置 PID 控制器的状态(例如在某些情境下需要重置误差和积分项)。
-
System类:
currentState是系统的当前状态值,可以表示温度、速度等控制目标。update()方法根据控制信号来更新系统的状态。在实际应用中,系统的状态变化通常受到多个因素的影响,这里我们假设它与控制信号成正比。
-
main():
- 初始化 PID 控制器和仿真系统。
- 使用
compute()方法计算每个时间步的控制信号,并将其应用到系统中更新系统状态。 - 每个时间步输出当前状态、控制信号和误差。
运行示例
假设我们设置:
- 目标值(setpoint)为 100
- PID 增益系数:
程序的输出可能类似于:
Time step 1: Current State = 2.0, Control Signal = 2.0, Error = 98
Time step 2: Current State = 6.0, Control Signal = 4.0, Error = 94
Time step 3: Current State = 12.0, Control Signal = 6.0, Error = 88
Time step 4: Current State = 18.0, Control Signal = 8.0, Error = 82
...
Time step 50: Current State = 97.99, Control Signal = 0.42, Error = 2.01
可以看到,随着时间的推移,系统状态逐渐接近目标值 100,PID 控制器逐渐减小控制信号,以使得误差趋于 0。
项目总结
-
PID 控制原理:
- PID 控制算法基于比例、积分、微分三种成分的组合,通过调整控制信号来使系统输出接近目标值。
- 在实际应用中,PID 控制器非常有效,尤其适用于要求系统稳定、精确控制的场合。
-
PID 调节:
- PID 控制器的效果在于其对误差的即时响应(比例)、对误差积累的修正(积分)以及对误差变化趋势的预测(微分)。
- 实际应用中,需要根据具体系统的特性调节 Kp、Ki、Kd 参数,以实现最优控制。
-
应用场景:
- 温度控制:通过调节加热器的功率来使温度接近目标值。
- 速度控制:在电动机控制中,通过 PID 控制调节速度。
- 航向控制:在自动驾驶和机器人控制中,PID 控制用于调节航向和位置。
通过本项目的实现,我们理解了 PID 控制的基本概念,并掌握了如何在 C++ 中实现一个简单的 PID 控制器。

















 7983
7983

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









