






机械臂
#include<myhead.h>
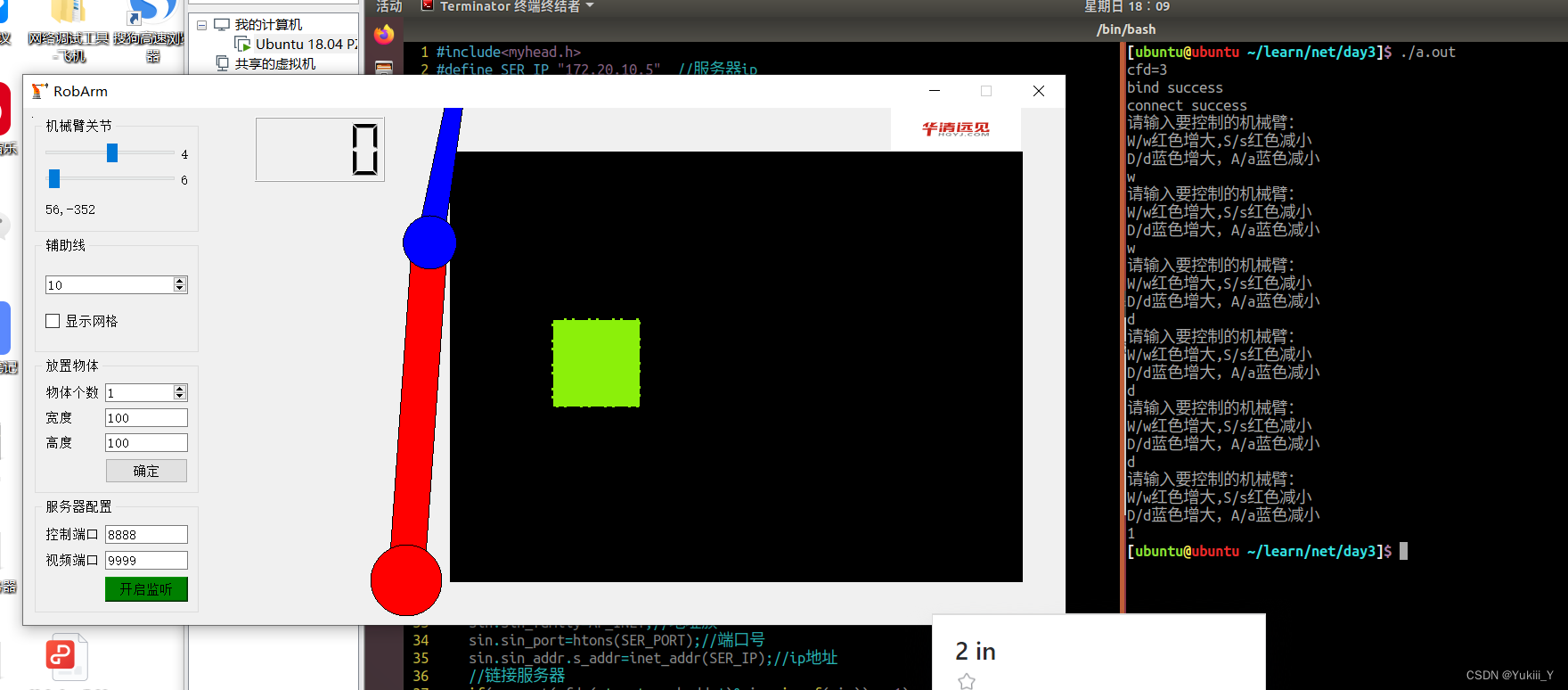
#define SER_IP "172.20.10.5" //服务器ip
#define SER_PORT 8888 //服务器端口号
#define CLI_IP "192.168.111.154" //客户端IP
#define CLI_PORT 9999 //客户端端口号
int main(int argc, const char *argv[])
{
int cfd;
//创建用于通信的套接字文件描述符
if((cfd=socket(AF_INET,SOCK_STREAM,0))==-1)
{
perror("socket error");
return -1;
}
printf("cfd=%d\n",cfd);
//绑定
//填充地址信息结构体
struct sockaddr_in cin;
cin.sin_family=AF_INET;
cin.sin_port=htons(CLI_PORT);
cin.sin_addr.s_addr=inet_addr(CLI_IP);
//绑定
if(bind(cfd,(struct sockaddr*)&cin,sizeof(cin))==-1)
{
perror("bind error");
return -1;
}
printf("bind success\n");
//链接服务器
//填充要链接的服务器地址信息结构体
struct sockaddr_in sin;
sin.sin_family=AF_INET;//地址族
sin.sin_port=htons(SER_PORT);//端口号
sin.sin_addr.s_addr=inet_addr(SER_IP);//ip地址
//链接服务器
if(connect(cfd,(struct sockaddr*)&sin,sizeof(sin))==-1)
{
perror("connect error");
return -1;
}
printf("connect success\n");
//数据收发
char rbuf[5]={0xff,0x02,0x00,0x00,0xff};
unsigned char bbuf[5]={0xff,0x02,0x01,0x00,0xff};
//发送给服务器当做初始值
send(cfd,rbuf,sizeof(rbuf),0);
sleep(1);
send(cfd,bbuf,sizeof(bbuf),0);
char key=0;
while(1)
{
printf("请输入要控制的机械臂:\nW/w红色增大,S/s红色减小\nD/d蓝色增大,A/a蓝色减小\n");
scanf("%c",&key);
getchar();
switch(key)
{
case 'W':
case'w':
{
rbuf[3]+=2;//每次操作的角度偏移2
if(rbuf[3]>=90)
{
rbuf[3]=90;
}
send(cfd,rbuf,sizeof(rbuf),0);
}
break;
case 'S':
case 's':
{
rbuf[3]-=2;//红色减小
if(rbuf[3]>=90)
{
rbuf[3]=90;
}
send(cfd,rbuf,sizeof(rbuf),0);
}
break;
case 'D':
case'd':
{
bbuf[3]+=2;//每次操作的角度偏移2
if(bbuf[3]>=90)
{
bbuf[3]=90;
}
send(cfd,bbuf,sizeof(bbuf),0);
}
break;
case 'A':
case 'a':
{
bbuf[3]-=2;
if(bbuf[3]>=90)
{
bbuf[3]=90;
}
send(cfd,bbuf,sizeof(bbuf),0);
}
break;
default:goto A;
}
}
close(cfd);
A:;
return 0;
}
文件的上传和下载
#include<myhead.h>
#define SER_IP "172.20.10.5"
#define SER_PORT 69
int main(int argc, const char *argv[])
{
//创建套接字
int cfd=socket(AF_INET,SOCK_DGRAM,0);
if(cfd==-1)
{
perror("socket error");
return -1;
}
printf("cfd=%d\n",cfd);
//收发数据
char pack[516]="";
//定义容器,记录服务器的地址信息结构体
struct sockaddr_in sin;
sin.sin_family=AF_INET;
sin.sin_port=htons(SER_PORT);
sin.sin_addr.s_addr=inet_addr(SER_IP);
//下载
short *p1=(short *)pack;
*p1=htons(1);//设置操作码
char *p2=(char *)p1+1;
//输入文件名
char name[50]="";
puts("请输入文件名:");
fgets(name,sizeof(name),stdin);
strcpy(p2,name);//文件名
char *p4=p2+strlen(p2)+1;
strcpy(p4,"octet");
int packlen=4+strlen(p2)+strlen(p4);//请求包的大小
//向服务器发送请求包
sendto(cfd,pack,packlen,0,(struct sockaddr*)&sin,sizeof(sin));
while(1)
{
//收取数据包,每次以512大小进行读取,直到读取结束
puts("1.上传");
puts("2.下载");
puts("请输入你想要进行的操作:");
int option;
scanf("%d",&option);
getchar();
switch(option)
{
case 1://上传
{
struct sockaddr_in cin;
socklen_t socklen = sizeof(cin); //计算结构体的大小
//以只读的方式打开文件
int rfd = -1;
if((rfd = open(name,O_RDONLY|O_CREAT|O_TRUNC,0664)) == -1)
{
perror("open error");
return -1;
}
short num = 0;
while(1)
{
//清空协议包
bzero(pack,sizeof(pack));
//接受发来的应答包
int res = recvfrom(cfd,pack,sizeof(pack),0,(struct sockaddr*)&cin,&socklen);
if(*p1 == ntohs(4))
{
//发送一个数据包
*p1 = htons(3);
num++;
*(p1 + 1) = htons(num);
//读取数据
res = read(rfd, p1+2,512);
sendto(cfd, pack, sizeof(pack),0,(struct sockaddr*)&cin,sizeof(cin));
if(res == 0)
{
printf("upload success\n");
break;
}
}
}
close(rfd);
}
break;
case 2:
{
struct sockaddr_in cin;
socklen_t socklen = sizeof(cin);
//打开文件
int wfd = -1;
if((wfd = open(name,O_WRONLY|O_CREAT|O_TRUNC,0664)) == -1)
{
perror("open error");
return -1;
}
while(1)
{
//清空协议包
bzero(pack, sizeof(pack));
int res = recvfrom(cfd, pack, sizeof(pack), 0, (struct sockaddr*)&cin,&socklen);
//判断操作码是否为3 数据内容是否为512字节
if(*p1 == ntohs(3))
{
//写入文件
write(wfd, pack+4, res-4);
//回复
sendto(cfd, pack, 4, 0,(struct sockaddr*)&cin, sizeof(cin));
//数据内容小于512字
if(res-4 < 512)
{
printf("download success\n");
break;
}
}
}
close(wfd);
}
break;
}
}
close(cfd);
return 0;
}















 820
820











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









