






一.AVL树的概念
AVL树本质上还是二叉搜索树,但是我们都知道,当插入的数据有序或者接近有序的时候二叉搜索就会退化,时间复杂度会降为O(N)。AVL就是为了解决这种问题而出现的,而后来的红黑树也以avl树为基础实现的。avl树会在当左右子树高度差大于1的时候进行旋转,从而让树的高度下降并保持在logn
二.AVL树的插入
AVL树的节点是由三叉链组成的。外加平衡因子,平衡因子就是用来控制旋转的。在我们插入一个数据的时候,前期和正常的二叉搜索树的插入一样,先通过比较找到插入的位置,再用插入的数据生成新的节点并插入。唯一的区别是要多保存一个指针指向它的父节点。插入新数据后需要更新平衡因子。如果新增在根节点的右子树的话则parent的平衡因子自增,若新增在左子树则平衡因子自减。更新后如果平衡因子变成1或者-1则需要将平衡因子的改变向上传递。若平衡因子变成2或者-2则说明当前树已经不平衡了,需要跳出进行旋转。若平衡因子变成0说明当前左右子树已经平衡,此时不需要继续向上更新。因为平衡因子更新是从下向上进行的。当前子树及以下已经平衡,即使往上更新也不会有任何变化,因为上面也是平衡的。理论上更新后是不会存在大于2和小于-2的值的。(插入过程中平衡因子的更新是重点)
三.AVL树的旋转
AVL树的旋转一共有四种情况:右单旋,左单旋,左右双旋,右左双旋。每次旋转都有六组指针需要处理
右单旋:新节点插入较高子树的左侧时候进行右单旋。这里举个例子。

新增是d,插入d后30的平衡因子变为-1,60的平衡因子变为-2,此时开始进行旋转。 首先我们把60的左指针指向b,如果b不为空的话再把b的父指针指向60.这是两组指针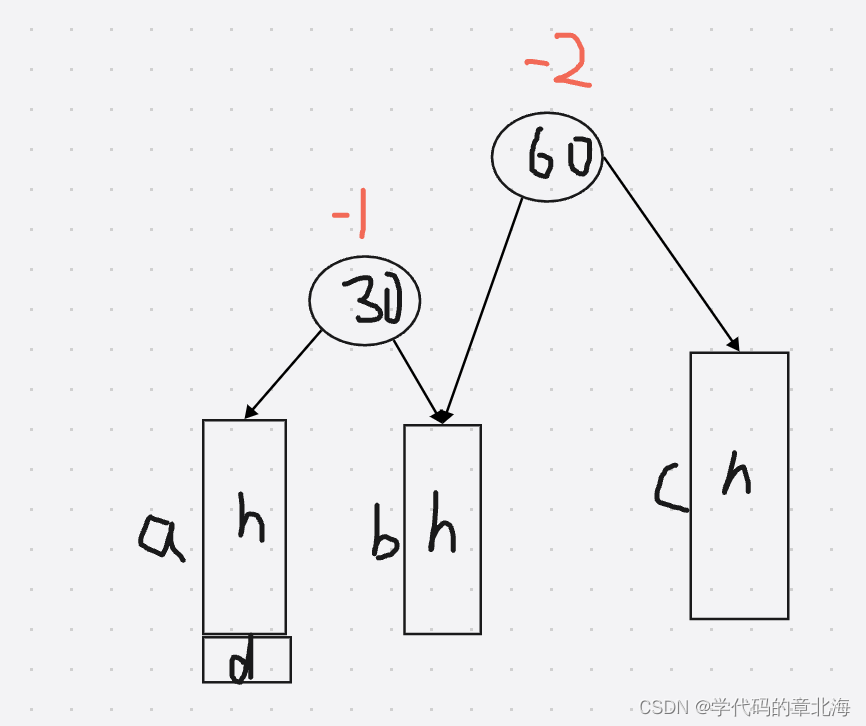
再把30的右指针指向60,再把60的父指针指向30,这里有一点需要注意,需要提前保存60 的父节点,因为60不一定是根节点。这里也处理了两组指针。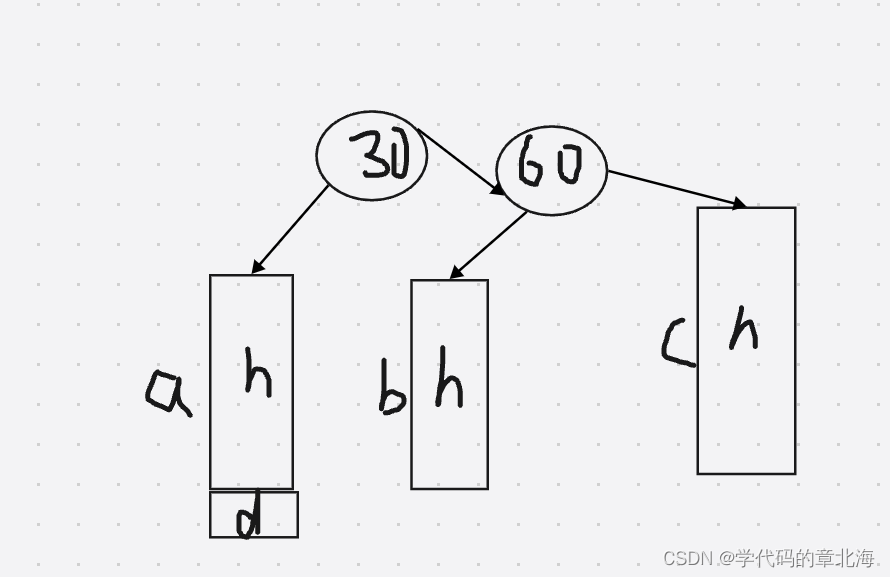
接下来又分为两种情况,若原来60为根节点的时候。我们需要让现在的30变成根节点,并让30的父节点置成空(如果是这种情况的话实际是处理了五组指针,最后一组指针因为是空不能解引用所以少一组。)另一种情况是60之上还有节点,此时我们需要判断原来的parent是他上级节点的右子树还是左子树。并和30连接起来。并让30指向他。到此一共处理了六组指针。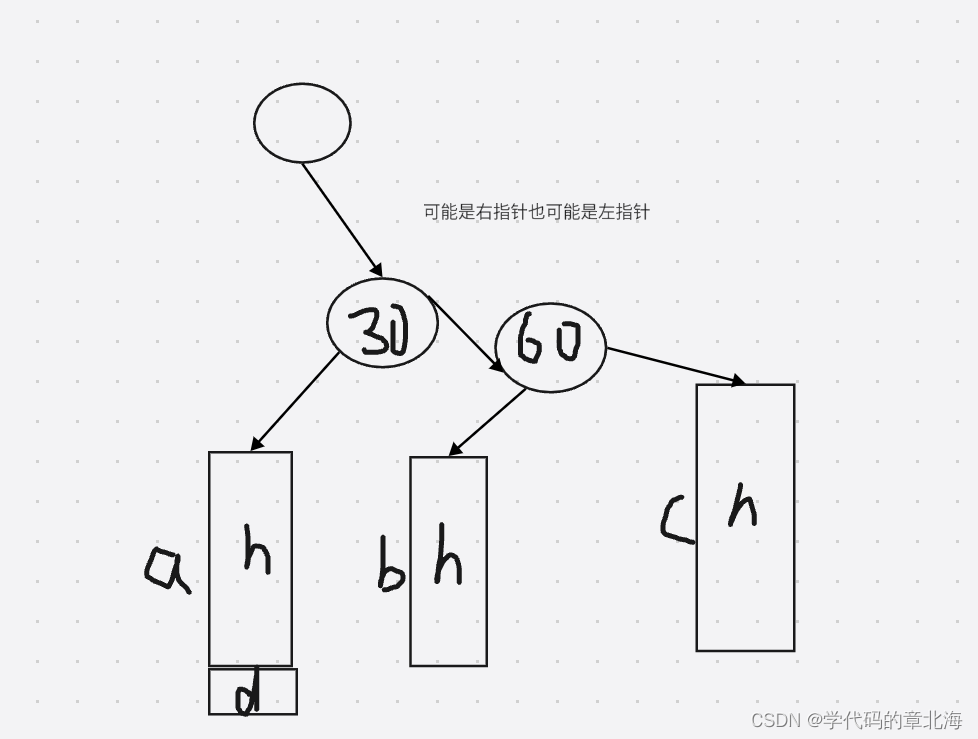
目前为止我们实现了插入功能,但我们还有平衡因子没有处理,从图上可以看到原来的根节点的平衡因子应该置为0,同时新的根节点平衡因子也应该设置成0。
左单旋:新增节点在较高右子树的右侧
左旋和右旋的逻辑是完全一样的不过是反方向旋转。这里就不详细说明了,通过画图来演示。新增为d。
第一二组指针在b和60之间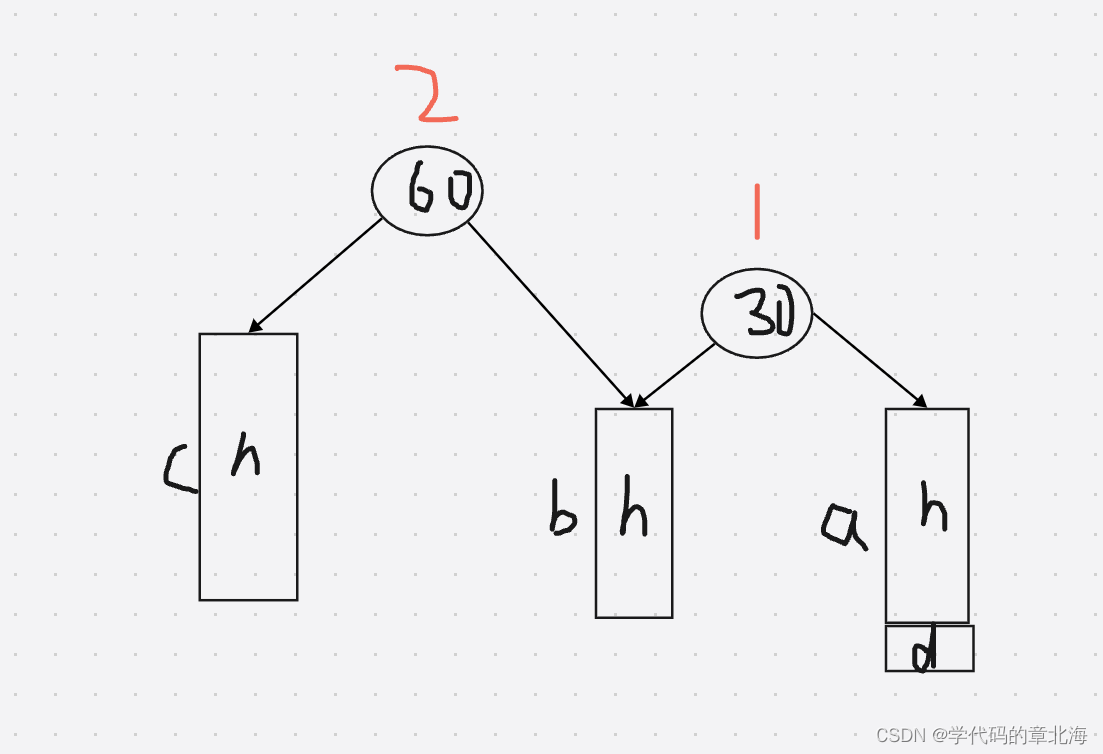
第三四组指针在30和60之间

第五六组指针处理根节点和上层节点的关系
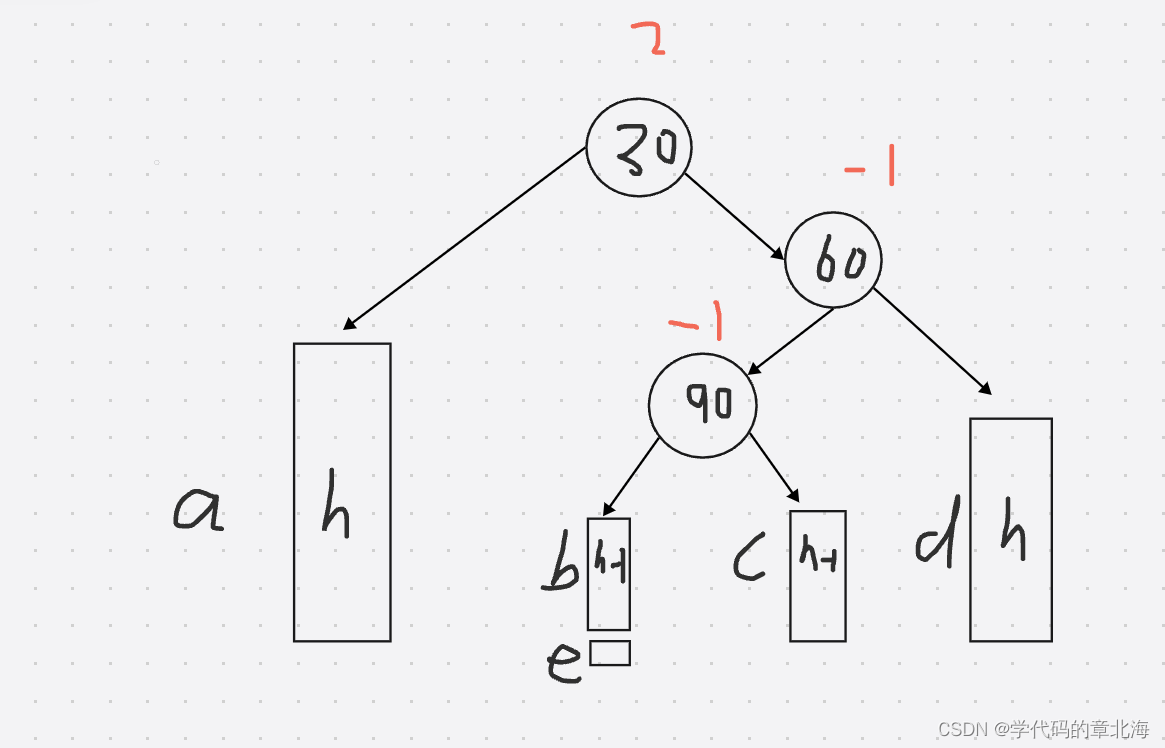
左右双旋:新增在较高左子树的右侧,也就是b的下边或者c的下边。这种情况我们需要先对30为根节点的这棵树进行左旋
左旋后变成这个样子,让较高的部分变成整棵树的左子树,这时候再对整棵树进行右旋
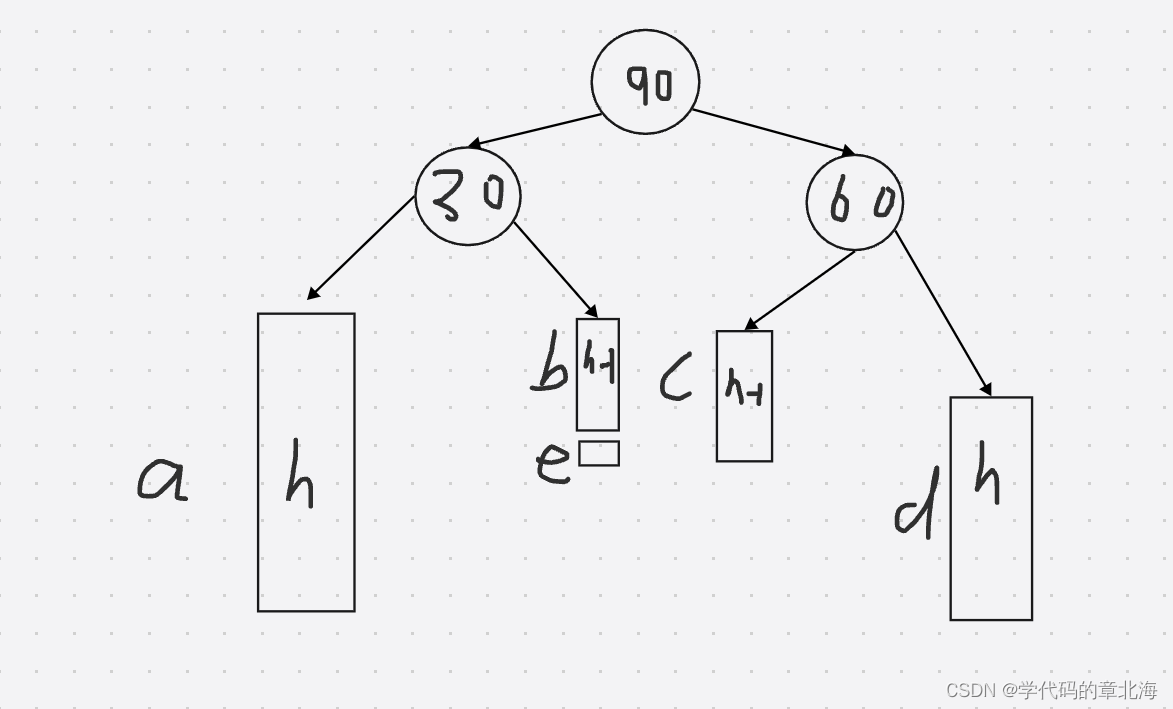
右旋后整棵树就平衡了。
双旋本质上就是对单旋的复用。双旋的难点不在于旋转的过程,而是在于平衡因子的处理。一共有三种情况,因为e可能新增在b或者c也有可能a,b,c,d都是空新增就是60,这会导致每种情况60这个位置的平衡因子都会不同。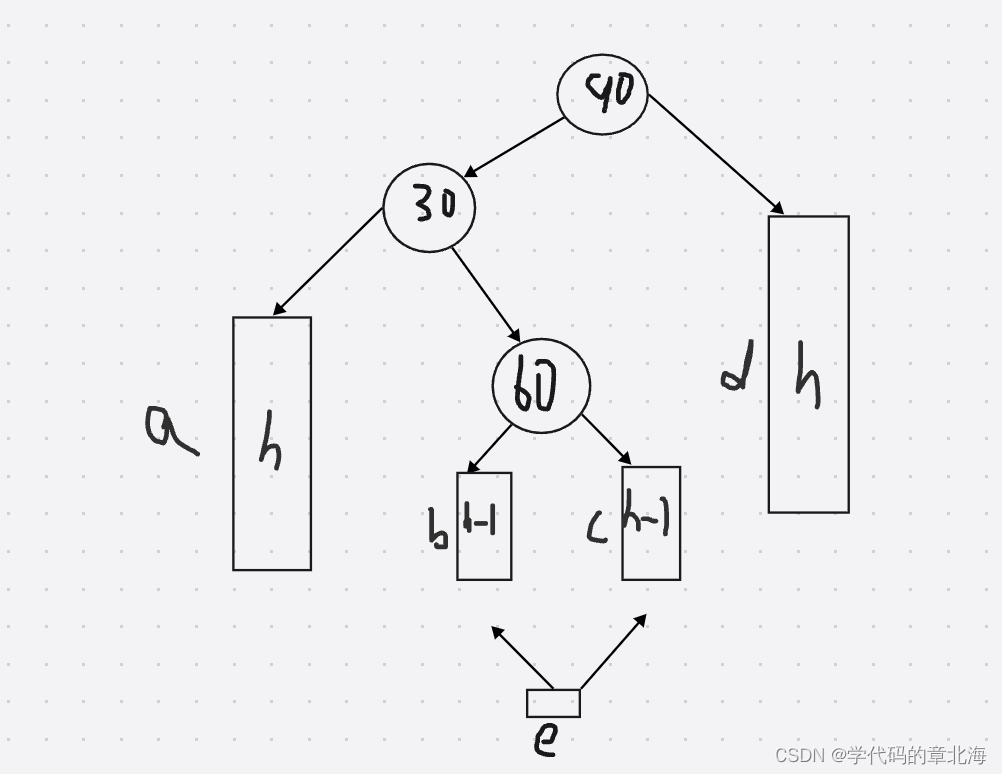
首先说新增在b时的情况:这时60的平衡因子会变成-1,我们可以通过这个平衡因子来判断属于哪种情况。旋转后由上图可知,新的根节点平衡因子为0,原根节点平衡因子为1,原来的左子树平衡因子为0
新增在c的时候:会变成下图的形式,通过观察可发现后来的根节点平衡因子一直为0 ,两种情况的不同之处在于旋转后新增的节点可能会在左子树的右边,或者在右子树的左边,导致左子树可能为0或-1,右子树可能为1或0
当60就是新增时,最后会旋转成如图,都为0,这种情况算是特殊情况。
右左双旋:新增节点在较高右子树的左侧,这种情况进行右左双选,先把60为根节点的树进行右旋

再对整棵树进行左旋
同样右左双旋也面临着平衡因子的三种情况。 当新增在e的时候,原来根节点变为0,根节点的右节点变为1,新的根节点变为0.当新增在c时,原来根节点变为-1,根节点的右节点变为0,新的根节点变为0。当60就是新增时,和左右双旋一样都为0.
四.代码模拟实现
template <class T>
struct AVLTreeNode
{
AVLTreeNode(const T& data = T())
: _pLeft(nullptr)
, _pRight(nullptr)
, _pParent(nullptr)
, _data(data)
, _bf(0)
{
}
AVLTreeNode<T>* _pLeft;
AVLTreeNode<T>* _pParent;
AVLTreeNode<T>* _pRight;
T _data;
int _bf; //节点的平衡因子
};
template <class T>
class AVLTree
{
typedef AVLTreeNode <T> Node;
public:
AVLTree()
:_root(nullptr)
{}
bool IsAVLTree()
{
return _IsAVLTree(_root);
}
bool Insert(const T& data)
{
if (_root == nullptr) //处理当树为空时
{
_root = new Node(data);
return true;
}
Node* parent = nullptr;
Node* cur = _root;
//寻找插入位置
while (cur)
{
if (cur->_data < data)
{
parent = cur;
cur = cur->_pRight;
}
else if (cur->_data > data)
{
parent = cur;
cur = cur->_pLeft;
}
else
{
return false;
}
}
cur = new Node(data); //找到位置插入节点
cur->_pParent = parent; //调整新插入节点的两个指针指向。
if (parent->_data < data)
{
parent->_pRight = cur;
}
else if (parent->_data > data)
{
parent->_pLeft = cur;
}
//处理平衡因子
while (parent) //从当前节点依次向上传导
{
if (cur == parent->_pRight) //当前子树处于右子树,负载因子自增
{
parent->_bf++;
}
else if (cur == parent->_pLeft) //当前子树位于左子树,负载因子自减
{
parent->_bf--;
}
if (parent->_bf == 0) //当前负载因子为0.不需要继续向上传递了。
{
break;
}
else if (abs(parent->_bf) == 1) //若负载因子变成1则需要传递到上一层
{
parent = parent->_pParent;
cur = cur->_pParent;
}
else if (abs(parent->_bf) == 2) //已经不平衡了不需要再传递了,需要进行旋转处理
{
if ((parent->_bf == 2) && cur->_bf == 1)
{
RotateL(parent);
}
else if ((parent->_bf == -2) && cur->_bf == -1)
{
RotateR(parent);
}
else if ((parent->_bf == 2) && cur->_bf == -1)
{
RotateRL(parent);
}
else if ((parent->_bf == -2) && cur->_bf == 1)
{
RotateLR(parent);
}
break;
}
else
{
assert(false);
}
}
return true;
}
void InOrder()
{
_InOrder(_root);
cout << endl;
}
private:
// 根据AVL树的概念验证pRoot是否为有效的AVL树
bool _IsAVLTree(Node* pRoot)
{
if (pRoot == nullptr)
{
return true;
}
int leftHT = _Height(pRoot->_pLeft); //手动计算左右子树高度差并和平衡因子比较
int rightHT = _Height(pRoot->_pRight);
int dif = rightHT - leftHT;
if (dif != pRoot->_bf)
{
cout << "平衡因子异常" << endl;
return false;
}
return abs(dif) < 2 && _IsAVLTree(pRoot->_pLeft) && _IsAVLTree(pRoot->_pRight);
}
size_t _Height(Node* pRoot)
{
if (pRoot == nullptr)
{
return 0;
}
return max(_Height(pRoot->_pLeft), _Height(pRoot->_pRight)) + 1;
}
// 右单旋
void RotateR(Node* Parent) //一共有六组指针需要处理
{
Node* subl = Parent->_pLeft;
Node* sublr = subl->_pRight;
Parent->_pLeft = sublr; //sublr和subl之间的两个指针
if (sublr)
{
sublr->_pParent = Parent;
}
Node* pparent = Parent->_pParent;
subl->_pRight = Parent; //subl和parent之间的两个指针
Parent->_pParent = subl;
//处理成为新的parent节点和其上级之间的两个指针
if (_root == Parent) //当原节点是根节点的时候特殊处理
{
_root = subl;
subl->_pParent = nullptr;
}
else //当原parent之上有节点的时候,需要判断原parent是上级的左子树还是右子树。
{
if (pparent->_pLeft == Parent)
{
pparent->_pLeft = subl;
}
else if (pparent->_pRight == Parent)
{
pparent -> _pRight = subl;
}
subl -> _pParent = pparent;
} //修改平衡节点
subl->_bf = 0;
Parent->_bf = 0;
}
// 左单旋
void RotateL(Node* Parent)
{
Node* subr = Parent->_pRight;
Node* subrl = subr->_pLeft;
Parent->_pRight = subrl;
if (subrl)
{
subrl->_pParent = Parent;
}
Node* pparent = Parent->_pParent;
subr->_pLeft = Parent;
Parent->_pParent = subr;
if (_root == Parent)
{
_root = subr;
subr->_pParent = nullptr;
}
else
{
if (pparent->_pLeft == Parent)
{
pparent->_pLeft = subr;
}
else if (pparent->_pRight == Parent)
{
pparent->_pRight = subr;
}
subr->_pParent = pparent;
}
subr->_bf = 0;
Parent->_bf = 0;
}
// 右左双旋
void RotateRL(Node* Parent)
{
Node* subr = Parent->_pRight;
Node* subrl = subr->_pLeft;
int bf = subrl->_bf; //需要保存右左子树的平衡因子,因为需要通过这个值来更新平衡因子
RotateR(Parent->_pRight); //对右子树右旋再对整棵树左旋
RotateL(Parent);
subrl->_bf = 0; //新的根节点的平衡因子更新为0
//平衡因子的更新有三种情况
if (bf == 0) //右左子树一开始为空
{
Parent->_bf = 0;
subr->_bf = 0;
}
else if (bf==1) //新增节点在右左子树的右侧
{
Parent->_bf = -1;
subr->_bf = 0;
}
else if (bf == -1)//新增节点在右左子树的左侧
{
Parent->_bf = 0;
subr->_bf = 1;
}
else
{
assert(false);
}
}
// 左右双旋
void RotateLR(Node* Parent)
{
Node* subl = Parent->_pLeft ;
Node* sublr = subl->_pRight;
int bf = sublr->_bf;
RotateL(Parent->_pLeft);
RotateR(Parent);
sublr->_bf = 0;
if (bf == 0)
{
Parent->_bf = 0;
subl->_bf = 0;
}
else if (bf == 1)
{
Parent->_bf = 0;
subl->_bf = -1;
}
else if (bf == -1)
{
Parent->_bf = 1;
subl->_bf = 0;
}
else
{
assert(false);
}
}
void _InOrder(Node* root)
{
if (root == nullptr)
{
return;
}
_InOrder(root->_pLeft);
cout << root->_data<<":" << root->_bf << endl;
_InOrder(root->_pRight);
}
private:
Node* _root;
};














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









