






一. 设备通信的两种方式
1.并行通信
传输原理:数据各个位同时传输。
优点:速度快。
缺点:浪费IO口资源。
2.串行通信
传输原理:数据按位顺序传输。
优点:占用IO口资源少。
缺点:速度慢。
二. 串行通信
1.数据传输方向的分类
单工:数据只支持在一个方向传输。
半双工:可以在两个方向传输,但是,在同一时刻,只能在一个方向上传输。
全双工:可以同时在两个方向上传输,,要求发送设备和接收设备都具有独立的接收和发送能力。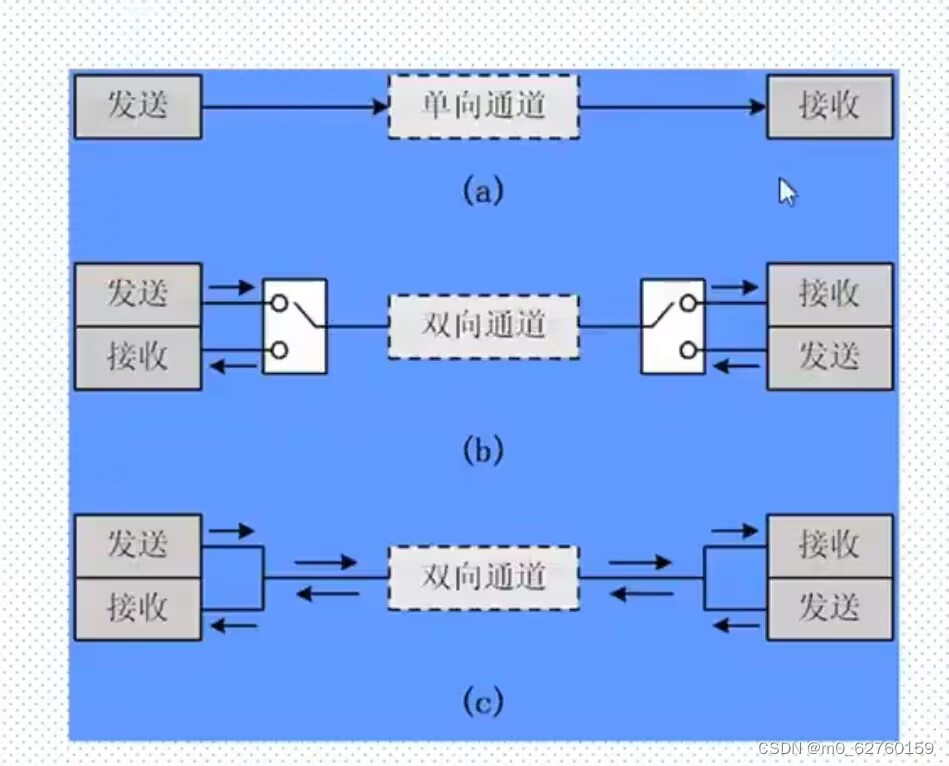
2.通信方式的分类
同步通信:带时钟同步信号传输。比如:SPI,I2C通信接口
异步通信:不带时钟同步信号 。比如:(通用异步收发器)UART,单总线。
易记:带时钟信号是同步,不带时钟信号是异步。
3.UART的接口图
RXD:数据输入引脚。数据接收。 TXD:数据输出引脚,数据发送。
GND:共地。 两电路板可以通过RS232,RS485,TTL接口。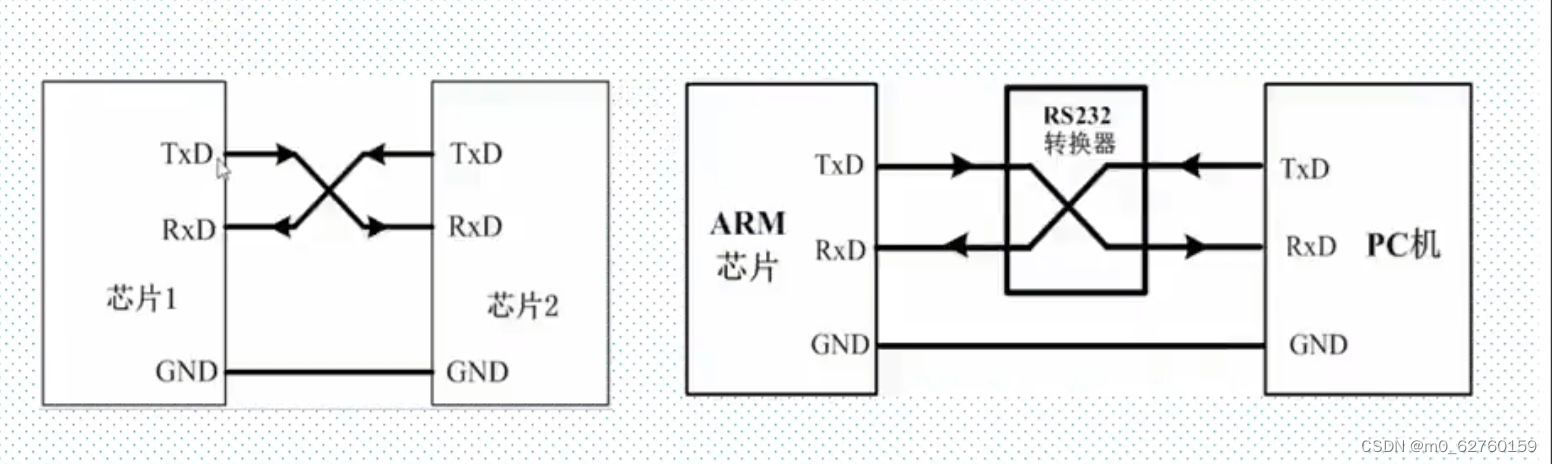
三. 系统框图
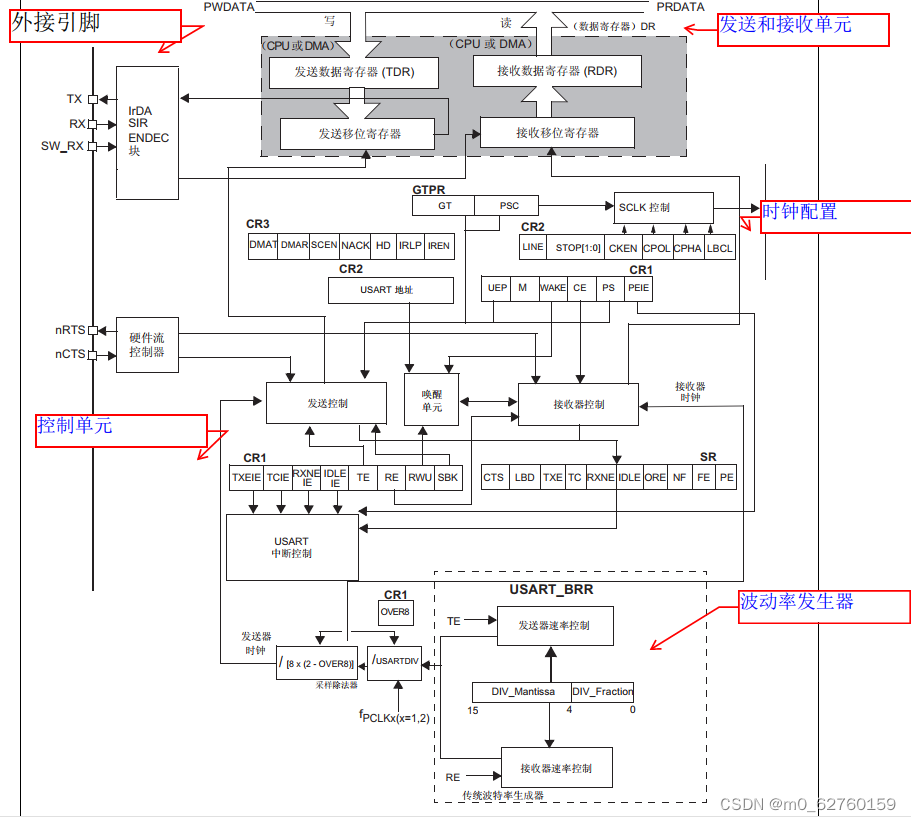
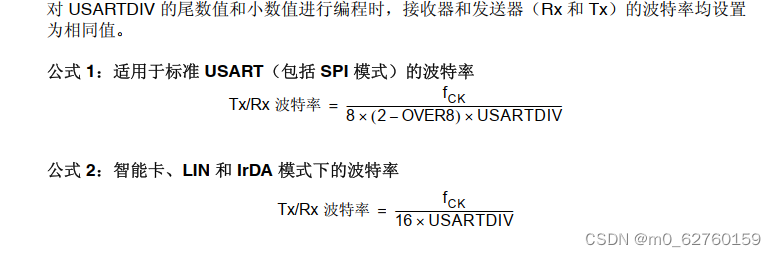
波动率的计算
UART发送配置
1.编程USARTx_CR1的M位来定义字长。
2.编程USARTx_CR2的STOP位来定义停止位的位数。
3.编程USARTx_BRR寄存器确定波动率。
4.使能USARTx_CR1的UE位使能USARTx.
5.如果进行多缓冲通信,要配置USARTxCR3的DMA使能。
6.使能USARTx_CR1的TE使能发生器。
7.向发送数据寄存器TDR写入要发送的数据
8.向TRD寄存器写入最后一个数据,等待状态寄存器TC位置1。
串口发送数据代码
#include "sys.h"
#include "delay.h"
#include "usart.h"
UART_HandleTypeDef usart1_handler;
void uart1_init()
{
usart1_handler.Instance=USART1;
usart1_handler.Init.BaudRate=115200;
usart1_handler.Init.WordLength=UART_WORDLENGTH_8B;
usart1_handler.Init.HwFlowCtl=UART_HWCONTROL_NONE;
usart1_handler.Init.Mode=UART_MODE_TX_RX;
usart1_handler.Init.Parity=UART_PARITY_NONE;
HAL_UART_Init(&usart1_handler);
}
void HAL_UART_MspInit(UART_HandleTypeDef *huart)
{
GPIO_InitTypeDef GPIO_Initure;
if(huart->Instance==USART1)
{
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_USART1_CLK_ENABLE();
GPIO_Initure.Pin=GPIO_PIN_9;
GPIO_Initure.Mode=GPIO_MODE_AF_PP;
GPIO_Initure.Speed=GPIO_SPEED_HIGH;
GPIO_Initure.Pull=GPIO_PULLUP;
GPIO_Initure.Alternate=GPIO_AF7_USART1;
HAL_GPIO_Init(GPIOA,&GPIO_Initure);
GPIO_Initure.Pin=GPIO_PIN_10;
HAL_GPIO_Init(GPIOA,&GPIO_Initure);
}
}
int main(void)
{
u8 buff[]="test";
HAL_Init(); //初始化HAL库
Stm32_Clock_Init(360,25,2,8); //设置时钟,180Mhz
delay_init(180);
uart1_init();
while(1)
{
HAL_UART_Transmit(&usart1_handler,buff,sizeof(buff),1000);
delay_ms(300);
}
}
串口接收数据与发送数据大同小异
在发送数据的基础上加入中断,接收到数据的时候进入中断服务函数
#include "sys.h"
#include "delay.h"
#include "usart.h"
u8 rdata[1];
UART_HandleTypeDef usart1_handler;
void uart1_init()
{
usart1_handler.Instance=USART1;
usart1_handler.Init.BaudRate=115200;
usart1_handler.Init.WordLength=UART_WORDLENGTH_8B;
usart1_handler.Init.HwFlowCtl=UART_HWCONTROL_NONE;
usart1_handler.Init.Mode=UART_MODE_TX_RX;
usart1_handler.Init.Parity=UART_PARITY_NONE;
HAL_UART_Init(&usart1_handler);
}
void HAL_UART_MspInit(UART_HandleTypeDef *huart)
{
GPIO_InitTypeDef GPIO_Initure;
if(huart->Instance==USART1)
{
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_USART1_CLK_ENABLE();
GPIO_Initure.Pin=GPIO_PIN_9;
GPIO_Initure.Mode=GPIO_MODE_AF_PP;
GPIO_Initure.Speed=GPIO_SPEED_HIGH;
GPIO_Initure.Pull=GPIO_PULLUP;
GPIO_Initure.Alternate=GPIO_AF7_USART1;
HAL_GPIO_Init(GPIOA,&GPIO_Initure);
GPIO_Initure.Pin=GPIO_PIN_10;
HAL_GPIO_Init(GPIOA,&GPIO_Initure);
HAL_NVIC_SetPriority(USART1_IRQn,3,3);
HAL_NVIC_EnableIRQ(USART1_IRQn);
}
}
void USART1_IRQHandler(void)
{
HAL_UART_IRQHandler(&usart1_handler);
HAL_UART_Receive_IT(&usart1_handler,rdata,sizeof(rdata));
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
u8 rec;
if(huart->Instance==USART1)
{
rec=*((huart->pRxBuffPtr)-1);
// rec=rdata[0];
HAL_UART_Transmit(&usart1_handler,&rec,1,1000);
}
}
int main(void)
{
HAL_Init(); //初始化HAL库
Stm32_Clock_Init(360,25,2,8); //设置时钟,180Mhz
delay_init(180);
uart1_init();
HAL_UART_Receive_IT(&usart1_handler,rdata,sizeof(rdata));
while(1)
{
}
}















 1682
1682

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









