






一、Anaconda 的安装
打开网址,现在是2023年12月,对应的anaconda版本是支持python3.11。如果想下载之前的版本,或者更低python版本的anaconda,可以打开网址。

双击下载好的anaconda安装包,just me是说只供当前用户使用。all user 是供使用这台电脑的所有用户使用,是权限问题。对空间影响不大。如果你的电脑上只有建了一个用户,all users和just me 的作用是一样的。所以点击just me就好了
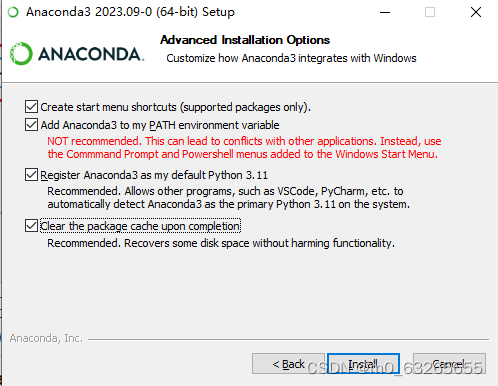
然后点击next,当让你选择安装安装路径的时候,最好不要选择默认位置,以后要在anaconda里面创建环境的时候会很占内存,最好在D盘中创建一个文件夹来放anaconda。选择好点击内next,接下来四个全部勾选上,点击安装就好了。
安装完成以后,打开开始菜单在左边就会出现anaconda3这个两个图标,可以发现anaconda已经安装好了。
二、Pytorch环境安装
打开开始菜单,打开anaconda Prompt 。或者通过win+r然后打开cmd,通过输入下面代码进入也可以
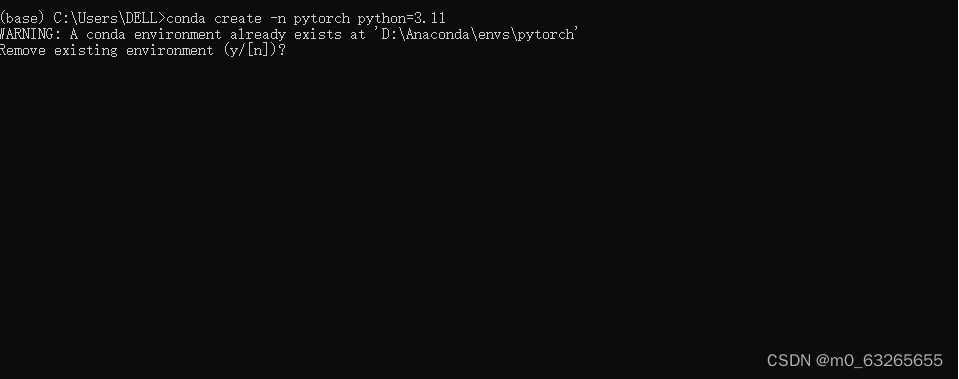
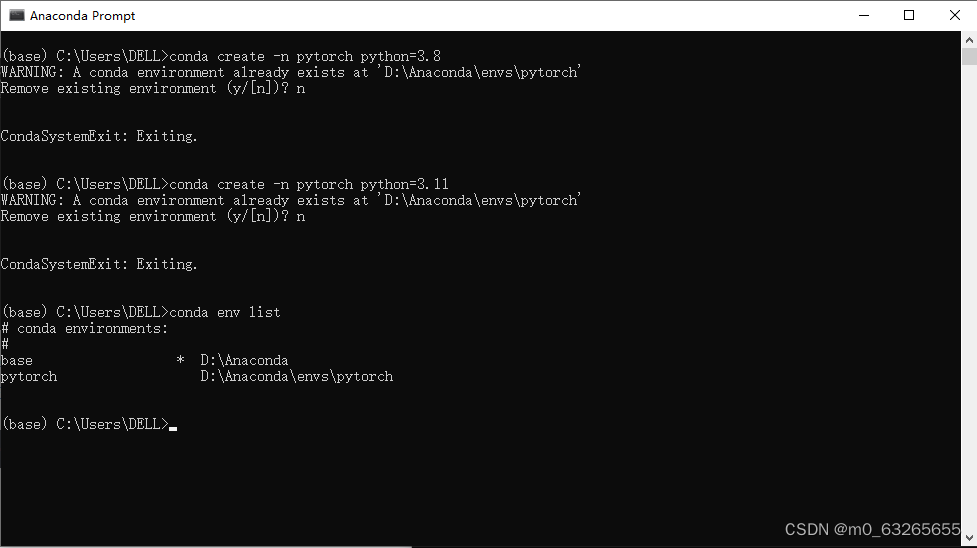
conda activate创建虚拟环境conda create -n 环境名字(英文) python=x.x(python版本),如下,我就是创建了一个名字叫pytorch,python是3.11版本的环境。
conda create -n pytorch python=3.11
在base环境中执行如上的命令,就会创建一个新的虚拟环境,这个虚拟环境会安装一些基础的包,如下图所示。询问是否安装的时候,输入y。就可以创建环境了。(我这里已经创建好了就显示已经存在了)
当安装好了以后,执行conda env list这个命令,就可以看到比一开始多了一个pytorch这个环境。现在我们可以在这个环境里面安装深度学习框架和一些Python包了。
conda env list
执行如下命令,激活这个环境。conda activate 虚拟环境名称
conda activate pytorch
安装pytorch-gup版的环境,由于pytorch的官网在国外,下载相关的环境包是比较慢的,所以我们给环境换源。在pytorch环境下执行如下的命名给环境换清华源。
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/free/
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main/
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/pytorch/
conda config --set show_channel_urls yes
下载一个显卡驱动的, 显卡驱动的下载地址,可以直接在桌面右键,找到英伟达驱动控制面板打开就好了。
安装(更新)好了显卡驱动以后。我们按下win+R组合键,打开cmd命令窗口。输入如下的命令。
nvidia-smi
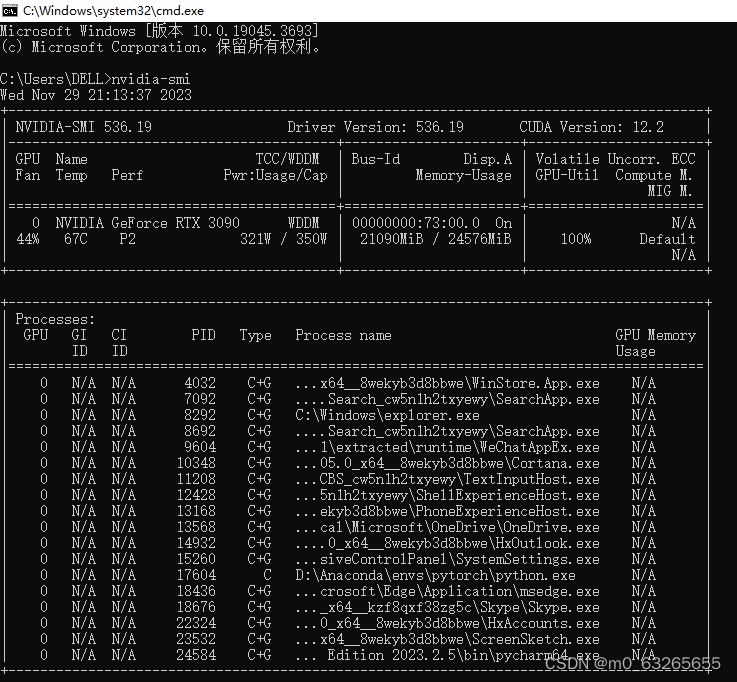
然后打开pytorch的官网,最高支持cuda11.5版本,所以我们选择cuda12.2版本的cuda,然后将下面红色框框中的内容复制下来
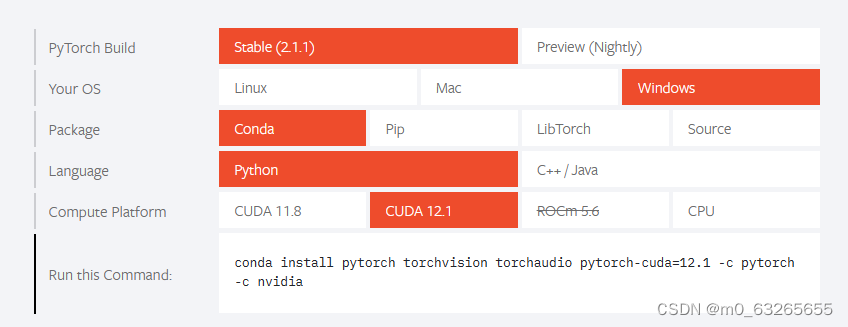
将复制的内容粘贴到pytorch环境下的终端,运行就可以了
至此。pytorch的深度学习环境就安装好了。
但是有部分不支持这么高的CUDA版本,那么我们就得找之前的版本,通过这个地方去找之前的版本,建议找11.3版本的
pip install torch==1.12.1+cu113 torchvision==0.13.1+cu113 torchaudio==0.12.1 --extra-index-url https://download.pytorch.org/whl/cu113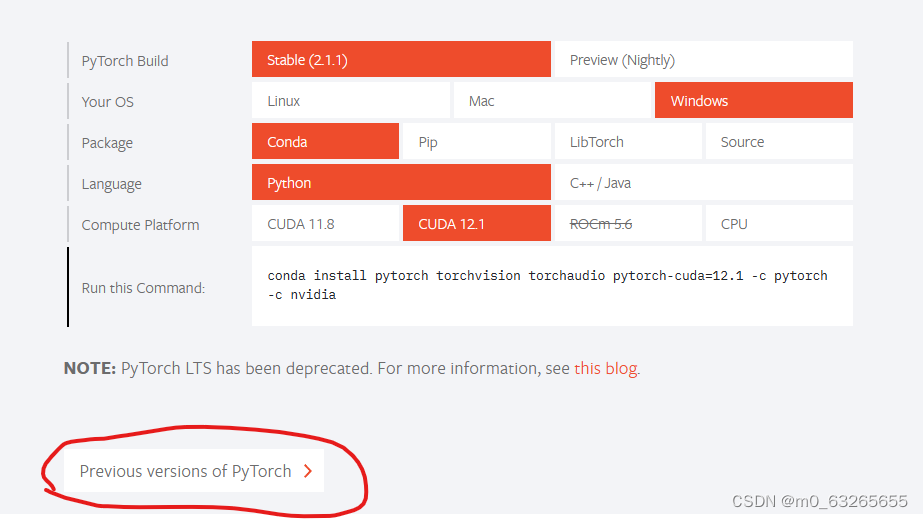
三、pycharm安装–验证CUDA和cudnn版本
打开这个pycharm网址,可以发现一共有两个版本一个是专业版(Professional),一个是社区版(Community),我们就下载安装免费的社区版就好了。将下载好的pycharm安装包,双击。安装的地址最好不要放在C盘。
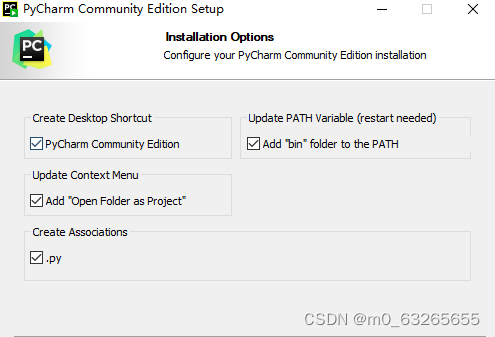
这个部分的四个全部勾上
打开pycharm,创建一个新的工程,来测试anaconda是否在安装pytorch框架的时候也安装了cuda和cudnn。按如下图创建一个工程
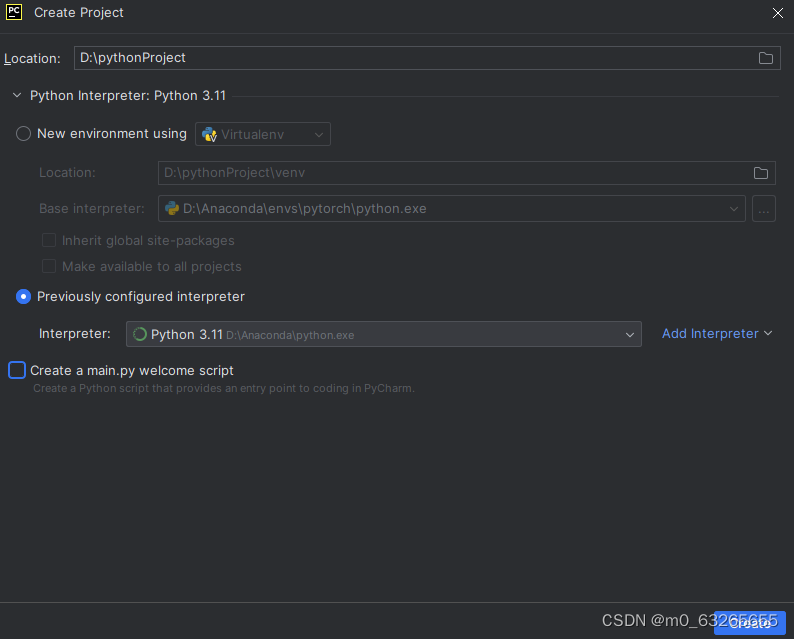
新版的pycharm是这样的界面,选择anaconda(我这里已经选用了所以没显示)
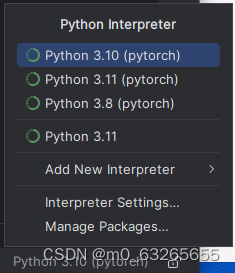
按以上的方式创建了一个工程,这时候我们就要选择我们在anaconda里面安装的环境,在界面的右下角
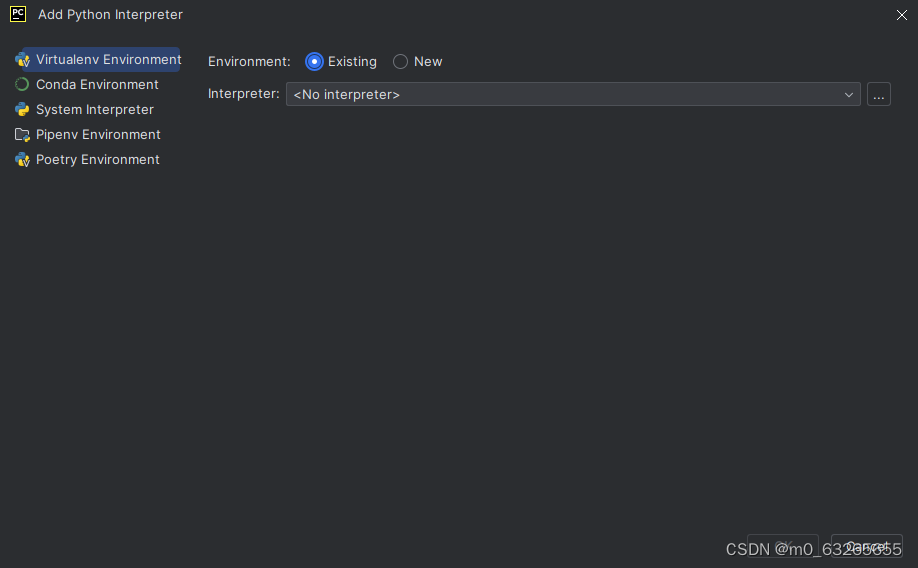
选择Add New Inerpreter
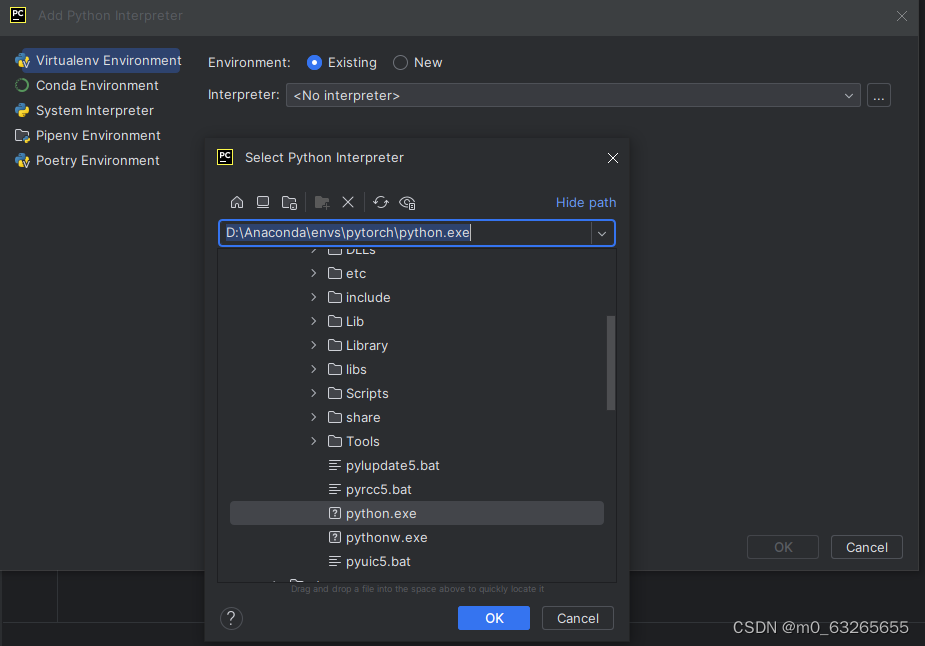
选择你anaconda的位置,按照这个路径找到pytorch的python.exe
我们在创建的工程里面创建一个python脚本,在脚本中运行如下代码,查看是否anconda在安装pytorch环境的时候也安装了cuda和cudnn。
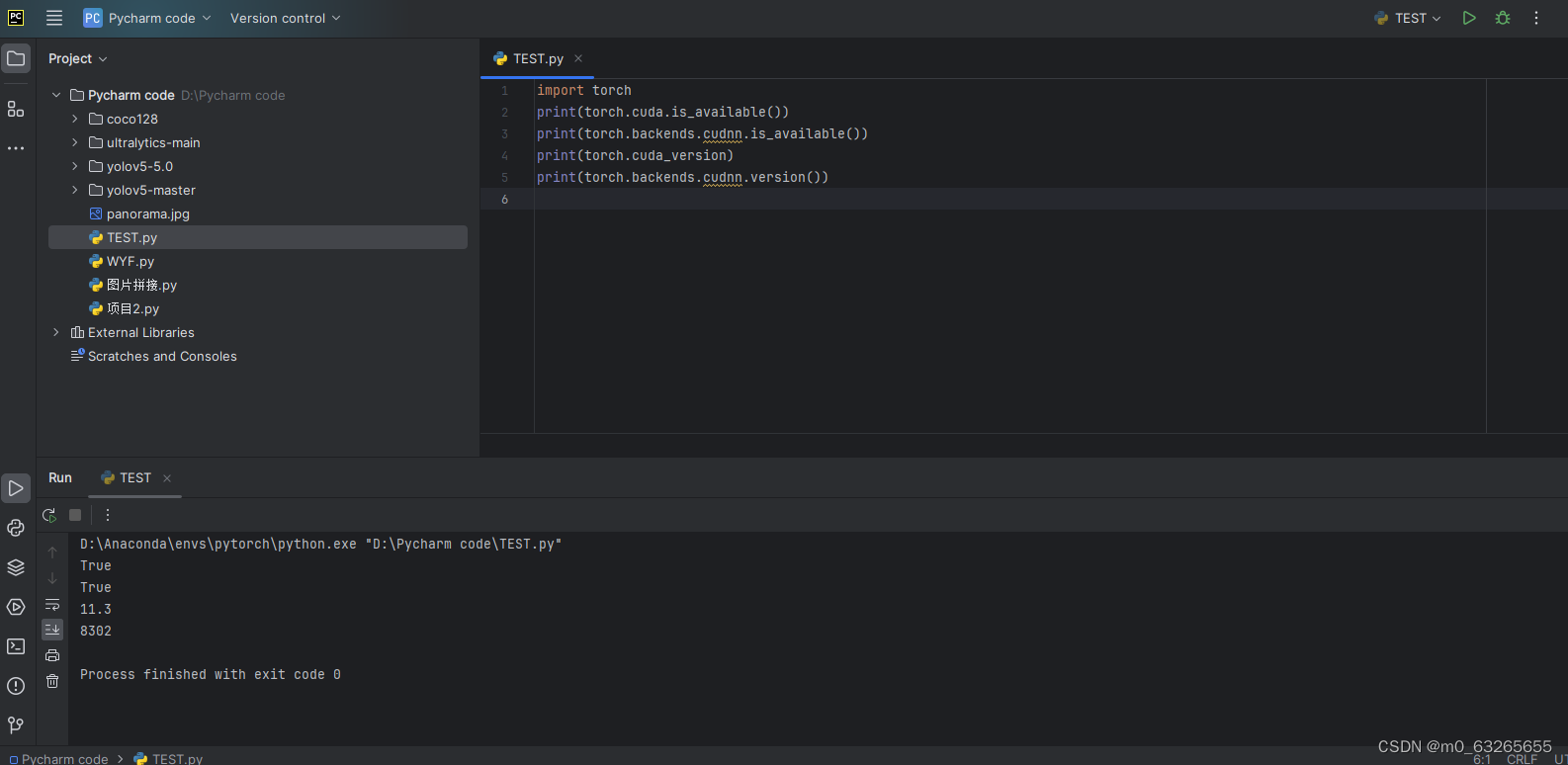 至此我们的深度学习环境安装就已经完全完成。接下来可以在相对的环境下进行深度学习的实验了。
至此我们的深度学习环境安装就已经完全完成。接下来可以在相对的环境下进行深度学习的实验了。
四、labelimg的安装
首先按照上面的方式打开pytorch的环境。输入如下的命令:
pip install labelimg -i https://pypi.tuna.tsinghua.edu.cn/simple
运行如上命令后,系统就会自动下载labelimg相关的依赖。

五、使用labelimg
首先这里需要准备我们需要打标注的数据集。这里我建议新建一个名为VOCdevkit的文件夹(这个是约定俗成,后续代码划分需要),在里面再创建一个VOC2007的文件夹,然后在VOC2007文件夹里面创建一个名为JPEGImages的文件夹存放我们需要打标签的图片文件;;再创建一个名为Annotations存放标注的标签文件;最后创建一个名字为predefined_classes.txt 的txt文件来存放所要标注的类别名称。
首先在JPEGImages这个文件夹放置待标注的图片然后再 predefined_classes.txt 这个txt文档里面输入定义的类别种类;之后打开刚刚下载的labelimg,用pycharm打开运行一下就好了

下面介绍图中的我们常用的按钮。
Open Dir是待标注图片数据的路径文件夹,这里输入命令的时候就选定了JPEGImages。(当然这是可以换的)Change Save Dir保存类别标签的路径文件夹,这里我们选定了Annotations文件夹。

这个按键可以说明我们标注的标签为voc格式,点击可以换成yolo或者createML格式。

常用快捷键如下:
A:切换到上一张图片
D:切换到下一张图片
W:调出标注十字架
del :删除标注框框
Ctrl+u:选择标注的图片文件夹
Ctrl+r:选择标注好的label标签存在的文件夹
记得把Auto Save mode勾选上这样就不用手动保存了

开始标注
我们按快捷键w,然后选定我们需要标注的对象。按住鼠标左键拖出框框就可以了。如下图所示,当我们选定目标以后,就会加载出来predefined_classes.txt 定义自己要标注的所有类别(如果类别多,是真的很方便,就不需要自己手打每个类别的名字了)。然后界面最右边会出现打好的类别标签。打好一张照片以后,快捷键D,就会进入下一张,这时候就会自动保存标签文件(voc格式会保存xml,yolo会保存txt格式)。标签打完以后可以去Annotations 文件下看到标签文件已经保存在这个目录下。
自此labelimg使用讲解就结束了。
voc标签转txt,并且划分测试集和验证集
我们经常从网上获取一些目标检测的数据集资源标签的格式都是VOC(xml格式)的,而yolov5训练所需要的文件格式是yolo(txt格式)的,这里就需要对xml格式的标签文件转换为txt文件。同时训练自己的yolov5检测模型的时候,数据集需要划分为训练集和验证集。这里提供了一份代码将xml格式的标注文件转换为txt格式的标注文件,并按比例划分为训练集和验证集。这里要把这个代码文件和刚才创建的文件夹放在一起
import xml.etree.ElementTree as ET
import pickle
import os
from os import listdir, getcwd
from os.path import join
import random
from shutil import copyfile
classes = ["hat", "person"]
#classes里面必须正确填写xml里面已经标注好的类,这里需要修改成自己的类
TRAIN_RATIO = 80 #TRAIN_RATIO是训练集和验证集的比例,当等于80的时候,说明划分80%给训练集,20%给验证集。
def clear_hidden_files(path):
dir_list = os.listdir(path)
for i in dir_list:
abspath = os.path.join(os.path.abspath(path), i)
if os.path.isfile(abspath):
if i.startswith("._"):
os.remove(abspath)
else:
clear_hidden_files(abspath)
def convert(size, box):
dw = 1./size[0]
dh = 1./size[1]
x = (box[0] + box[1])/2.0
y = (box[2] + box[3])/2.0
w = box[1] - box[0]
h = box[3] - box[2]
x = x*dw
w = w*dw
y = y*dh
h = h*dh
return (x,y,w,h)
def convert_annotation(image_id):
in_file = open('VOCdevkit/VOC2007/Annotations/%s.xml' %image_id)
out_file = open('VOCdevkit/VOC2007/YOLOLabels/%s.txt' %image_id, 'w')
tree=ET.parse(in_file)
root = tree.getroot()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text)
for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult) == 1:
continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text), float(xmlbox.find('ymax').text))
bb = convert((w,h), b)
out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')
in_file.close()
out_file.close()
wd = os.getcwd()
wd = os.getcwd()
data_base_dir = os.path.join(wd, "VOCdevkit/")
if not os.path.isdir(data_base_dir):
os.mkdir(data_base_dir)
work_sapce_dir = os.path.join(data_base_dir, "VOC2007/")
if not os.path.isdir(work_sapce_dir):
os.mkdir(work_sapce_dir)
annotation_dir = os.path.join(work_sapce_dir, "Annotations/")
if not os.path.isdir(annotation_dir):
os.mkdir(annotation_dir)
clear_hidden_files(annotation_dir)
image_dir = os.path.join(work_sapce_dir, "JPEGImages/")
if not os.path.isdir(image_dir):
os.mkdir(image_dir)
clear_hidden_files(image_dir)
yolo_labels_dir = os.path.join(work_sapce_dir, "YOLOLabels/")
if not os.path.isdir(yolo_labels_dir):
os.mkdir(yolo_labels_dir)
clear_hidden_files(yolo_labels_dir)
yolov5_images_dir = os.path.join(data_base_dir, "images/")
if not os.path.isdir(yolov5_images_dir):
os.mkdir(yolov5_images_dir)
clear_hidden_files(yolov5_images_dir)
yolov5_labels_dir = os.path.join(data_base_dir, "labels/")
if not os.path.isdir(yolov5_labels_dir):
os.mkdir(yolov5_labels_dir)
clear_hidden_files(yolov5_labels_dir)
yolov5_images_train_dir = os.path.join(yolov5_images_dir, "train/")
if not os.path.isdir(yolov5_images_train_dir):
os.mkdir(yolov5_images_train_dir)
clear_hidden_files(yolov5_images_train_dir)
yolov5_images_test_dir = os.path.join(yolov5_images_dir, "val/")
if not os.path.isdir(yolov5_images_test_dir):
os.mkdir(yolov5_images_test_dir)
clear_hidden_files(yolov5_images_test_dir)
yolov5_labels_train_dir = os.path.join(yolov5_labels_dir, "train/")
if not os.path.isdir(yolov5_labels_train_dir):
os.mkdir(yolov5_labels_train_dir)
clear_hidden_files(yolov5_labels_train_dir)
yolov5_labels_test_dir = os.path.join(yolov5_labels_dir, "val/")
if not os.path.isdir(yolov5_labels_test_dir):
os.mkdir(yolov5_labels_test_dir)
clear_hidden_files(yolov5_labels_test_dir)
train_file = open(os.path.join(wd, "yolov5_train.txt"), 'w')
test_file = open(os.path.join(wd, "yolov5_val.txt"), 'w')
train_file.close()
test_file.close()
train_file = open(os.path.join(wd, "yolov5_train.txt"), 'a')
test_file = open(os.path.join(wd, "yolov5_val.txt"), 'a')
list_imgs = os.listdir(image_dir) # list image files
prob = random.randint(1, 100)
print("Probability: %d" % prob)
for i in range(0,len(list_imgs)):
path = os.path.join(image_dir,list_imgs[i])
if os.path.isfile(path):
image_path = image_dir + list_imgs[i]
voc_path = list_imgs[i]
(nameWithoutExtention, extention) = os.path.splitext(os.path.basename(image_path))
(voc_nameWithoutExtention, voc_extention) = os.path.splitext(os.path.basename(voc_path))
annotation_name = nameWithoutExtention + '.xml'
annotation_path = os.path.join(annotation_dir, annotation_name)
label_name = nameWithoutExtention + '.txt'
label_path = os.path.join(yolo_labels_dir, label_name)
prob = random.randint(1, 100)
print("Probability: %d" % prob)
if(prob < TRAIN_RATIO): # train dataset
if os.path.exists(annotation_path):
train_file.write(image_path + '\n')
convert_annotation(nameWithoutExtention) # convert label
copyfile(image_path, yolov5_images_train_dir + voc_path)
copyfile(label_path, yolov5_labels_train_dir + label_name)
else: # test dataset
if os.path.exists(annotation_path):
test_file.write(image_path + '\n')
convert_annotation(nameWithoutExtention) # convert label
copyfile(image_path, yolov5_images_test_dir + voc_path)
copyfile(label_path, yolov5_labels_test_dir + label_name)
train_file.close()
test_file.close()
在VOCdevkit目录下生成images和labels文件夹,文件夹下分别生成了train文件夹和val文件夹,里面分别保存着训练集的照片和txt格式的标签,还有验证集的照片和txt格式的标签。images文件夹和labels文件夹就是训练yolov5模型所需的训练集和验证集。在VOCdevkit/VOC2007目录下还生成了一个YOLOLabels文件夹,里面存放着所有的txt格式的标签文件。
至此,xml格式的标签文件转换为txt格式的标签文件并划分为训练集和测试集就讲完了。
项目的克隆和必要的环境依赖
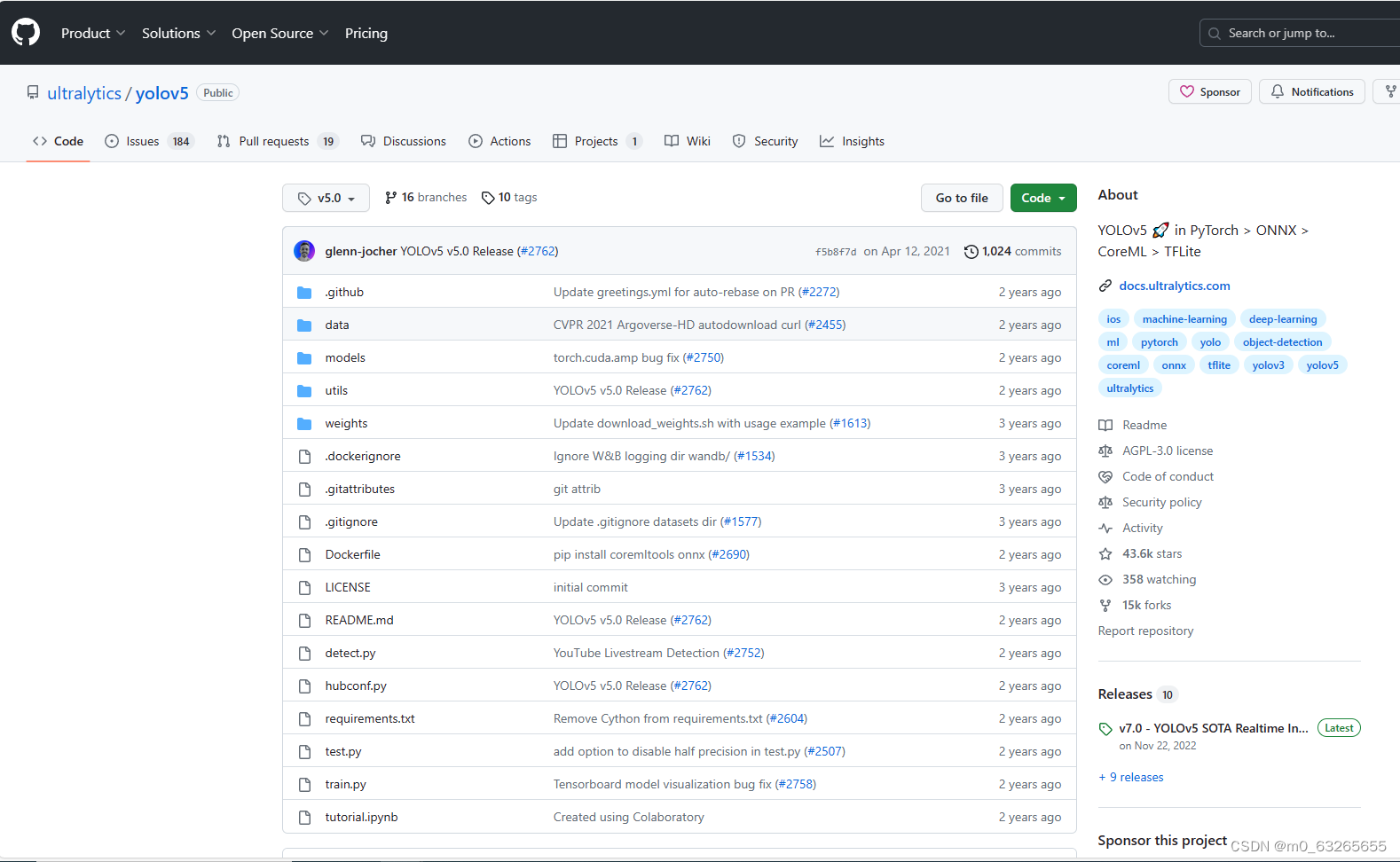
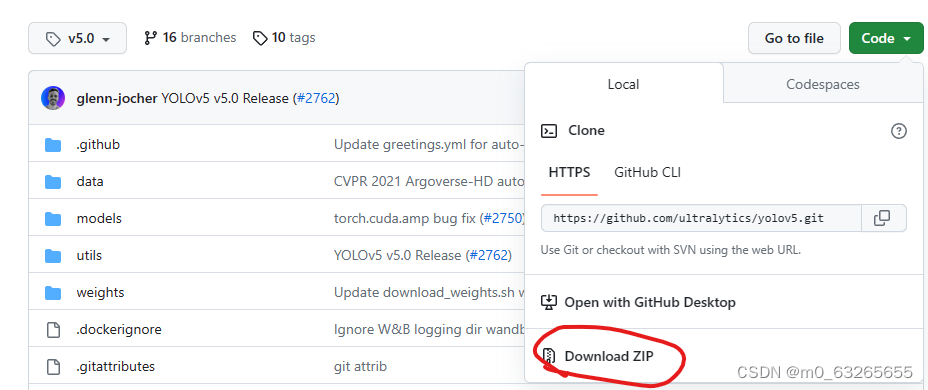
YOLOv5的代码是开源的,因此我们可以从github上克隆其源码。首先打开yolov5的github的官网,打开的官网界面如下。
将我们下载好的yolov5的代码解压,然后用一款IDE打开(我用的是pycharm),打开之后整个代码目录如下图:
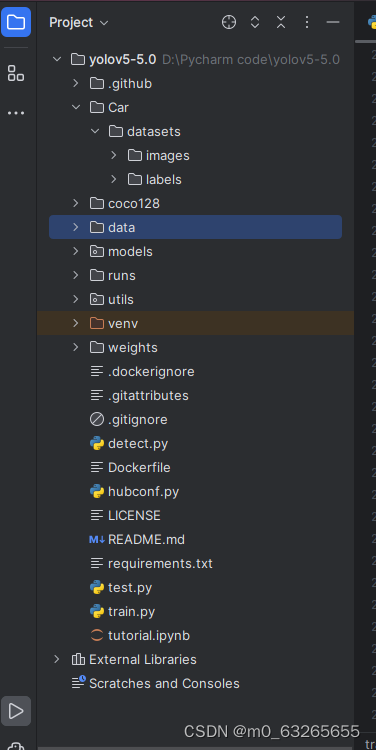
现在来对代码的整体目录做一个介绍:
data:主要是存放一些超参数的配置文件(这些文件(yaml文件)是用来配置训练集和测试集还有验证集的路径的,其中还包括目标检测的种类数和种类的名称);还有一些官方提供测试的图片。如果是训练自己的数据集的话,那么就需要修改其中的yaml文件。但是自己的数据集不建议放在这个路径下面,而是建议把数据集放到yolov5项目的同级目录下面。
models:里面主要是一些网络构建的配置文件和函数,其中包含了该项目的四个不同的版本,分别为是s、m、l、x。从名字就可以看出,这几个版本的大小。他们的检测测度分别都是从快到慢,但是精确度分别是从低到高。这就是所谓的鱼和熊掌不可兼得。如果训练自己的数据集的话,就需要修改这里面相对应的yaml文件来训练自己模型。
utils:存放的是工具类的函数,里面有loss函数,metrics函数,plots函数等等。
weights:放置训练好的权重参数。
detect.py:利用训练好的权重参数进行目标检测,可以进行图像、视频和摄像头的检测。
train.py:训练自己的数据集的函数。
test.py:测试训练的结果的函数。
requirements.txt:这是一个文本文件,里面写着使用yolov5项目的环境依赖包的一些版本,可以利用该文本导入相应版本的包。
以上就是yolov5项目代码的整体介绍。
环境的安装和依赖的安装
打开requirements.txt这个文件,可以看到里面有很多的依赖库和其对应的版本要求。我们打开pycharm的命令终端,在中输入如下的命令,就可以安装了。
pip install -r requirements.txt
在这个地方可能会存在下载不下来的问题
那么就得通过cmd来下载,这里先输入yolov5所在的磁盘(以D盘d:),然后在找到yolov5的位置,通过cd+yolov5位置,然后按照之前的通过cmd激活pytorch环境再输入上面内容。
至此,深度学习的环境和依赖包就都结束了。
数据集和预训练权重的准备
利用labelimg标注数据和数据的准备,上面已经说过了
获得预训练权重
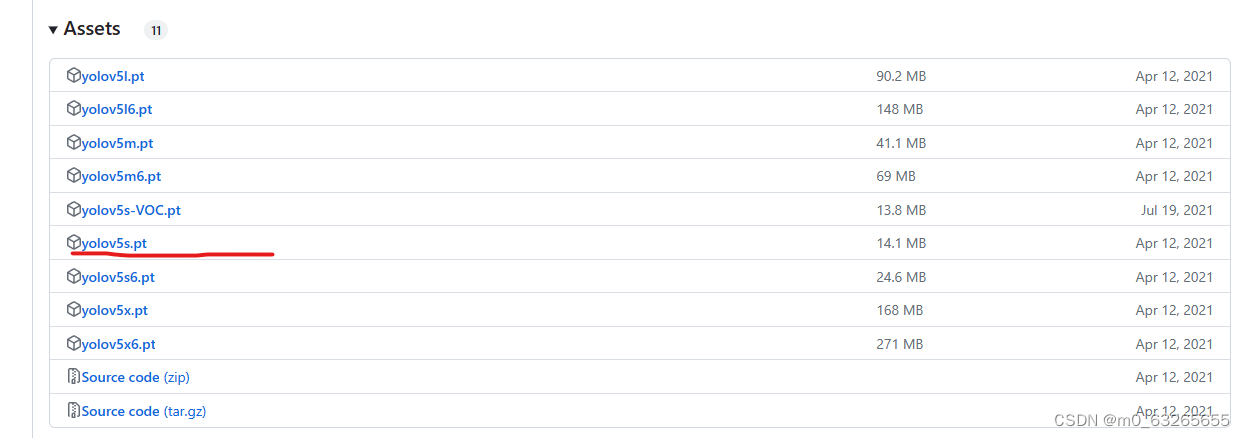
yolov5的5.0版本给我们提供了几个预训练权重,我们可以对应我们不同的需求选择不同的版本的预训练权重。通过如下的图可以获得权重的名字和大小信息,可以预料的到,预训练权重越大,训练出来的精度就会相对来说越高,但是其检测的速度就会越慢。预训练权重可以通过这个网址进行下载,本次训练自己的数据集用的预训练权重为yolov5s.pt。
训练自己的模型
修改数据配置文件
预训练模型和数据集都准备好了,就可以开始训练自己的yolov5目标检测模型了,训练目标检测模型需要修改两个yaml文件中的参数。一个是data目录下的相应的yaml文件,一个是model目录文件下的相应的yaml文件。
修改data目录下的相应的yaml文件。找到目录下的coco128.yaml文件,将该文件复制一份,将复制的文件重命名,最好和项目相关,这样方便后面操作。我这里修改为Car.yaml。(这个名字是随便起的)。打开你的改好的yaml文件,修改train,val的地址,记得把下面两个也改成自己的类,nc是你一共有多少个类。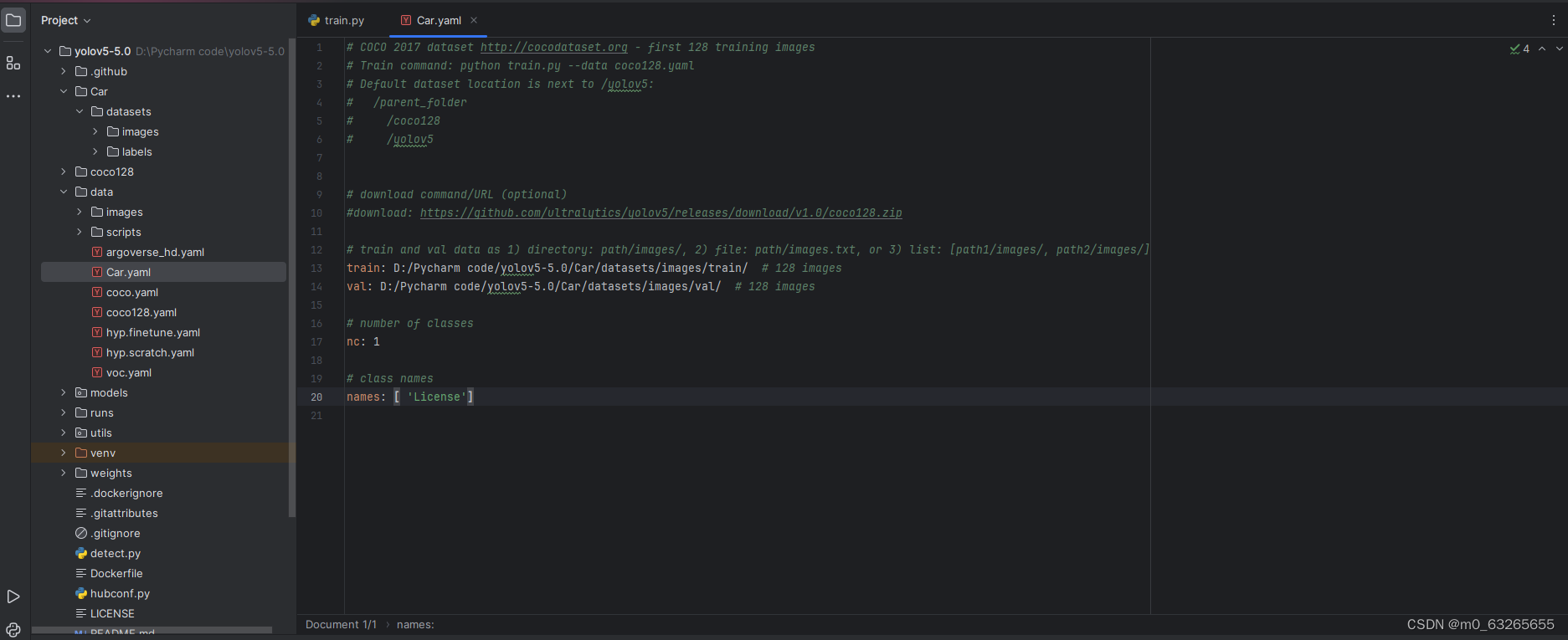
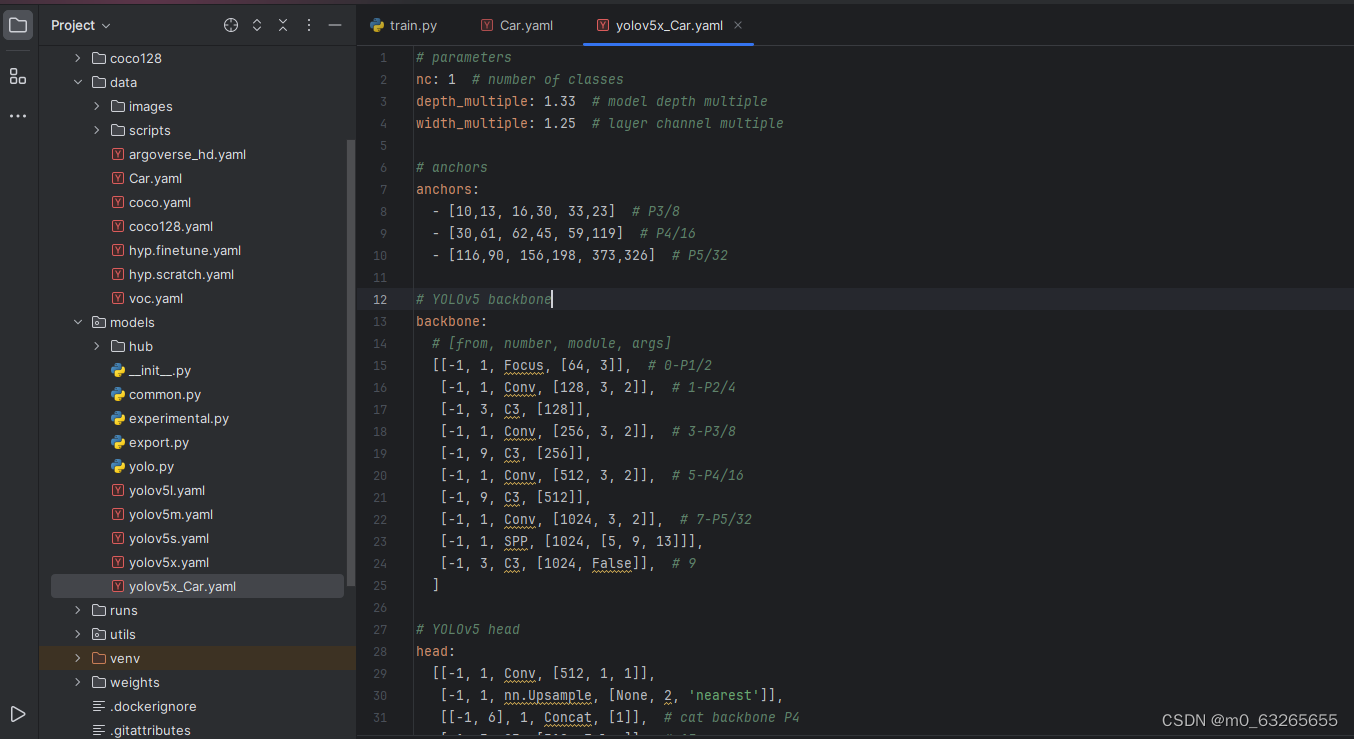
修改模型配置文件
由于该项目使用的是yolov5s.pt这个预训练权重,所以要使用models目录下的yolov5s.yaml文件中的相应参数。同上修改data目录下的yaml文件一样,我们最好将yolov5s.yaml文件复制一份,然后将其重命名。(这里需要注意一下一定是要下载版本对应的预训练权重pt文件不然会报错),我这里因为电脑可以支持yolov5x,所以就用的yolov5x.yaml,模型修改的内容是一样的,只需要修改nc为自己类的个数就行了。
 至此,相应的配置参数就修改好了。
至此,相应的配置参数就修改好了。
训练自己的模型
如果上面的数据集和两个yaml文件的参数都修改好了的话,就可以开始yolov5的训练了。首先我们找到train.py这个py文件。
然后找到主函数的入口,这里面有模型的主要参数。
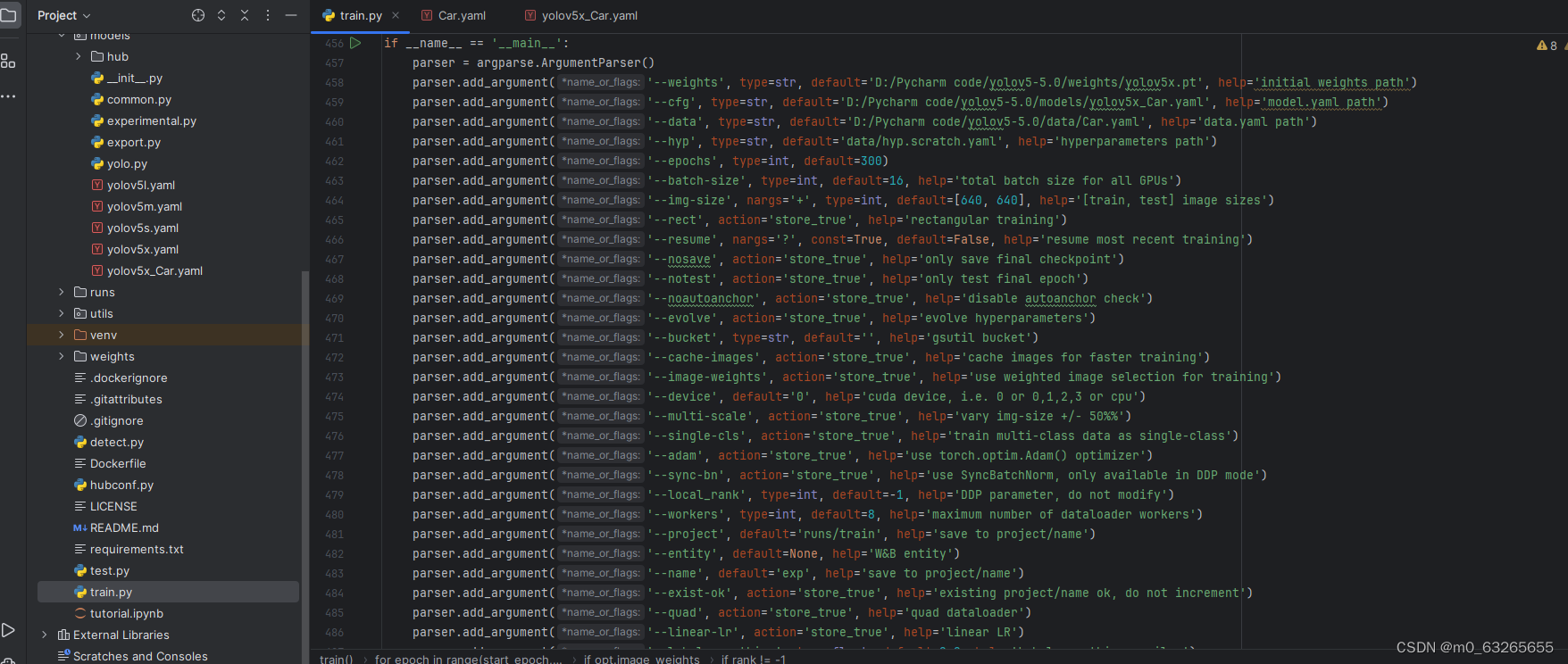
根据下面内容进行调整
opt模型主要参数解析:
weights:初始化的权重文件的路径地址(修改default,改成自己的权重地址,就是自己pt文件)
cfg:模型yaml文件的路径地址(修改default,改成自己的模型地址)
data:数据yaml文件的路径地址(修改default,改成自己的数据的yaml那个文件)
hyp:超参数文件路径地址(默认就好了)
epochs:训练轮次(超过200次就好了,超过200次就趋向稳定了)
batch-size:喂入批次文件的多少(根据自己电脑配置修改,配置不高经量调低成8或4)
img-size:输入图片尺寸(根据自己电脑配置修改,配置不高经量调低)
rect:是否采用矩形训练,默认False(默认就好了)
resume:接着打断训练上次的结果接着训练(默认就好了)
nosave:不保存模型,默认False(默认就好了)
notest:不进行test,默认False(默认就好了)
noautoanchor:不自动调整anchor,默认False(默认就好了)
evolve:是否进行超参数进化,默认False(默认就好了)
bucket:谷歌云盘bucket,一般不会用到(默认就好了)
cache-images:是否提前缓存图片到内存,以加快训练速度,默认False(默认就好了)
image-weights:使用加权图像选择进行训练(默认就好了)
device:训练的设备,cpu;0(表示一个gpu设备cuda:0);0,1,2,3(多个gpu设备)(改成0)
至此,就可以运行train.py函数训练自己的模型了。但是由于目前一些内容改变,还是会出现报错,报错内容也五花八门,我也是找了许多帖子才跑通。
报错1UnicodeDecodeError: 'utf-8' codec can't decode byte 0xb2 in position 6: invalid start byte
return subprocess.check_output(s, shell=True, stderr=subprocess.STDOUT).decode()[:-1]return subprocess.check_output(s, shell=True, stderr=subprocess.STDOUT).decode(encoding='gbk')[:-1]把上面那个改成下面这个就好了
报错2:AttributeError: module 'numpy' has no attribute 'int'.
`np.int` was a deprecated alias for the builtin `int`. To avoid this error in existing code, use `int` by itself. Doing this will not modify any behavior and is safe. When replacing `np.int`, you may wish to use e.g. `np.int64` or `np.int32` to specify the precision. If you wish to review your current use, check the release note link for additional information.
The aliases was originally deprecated in NumPy 1.20; for more details and guidance see the original release note at:
这个报错会发生好三四次,出现就修改就行了
把np.int改成np.int_报错3:IndexError: list index out of range
这个报错原因有好多,第一个是pt文件版本不对或者名字不对,第二个可能是data的yaml文件里的nc或者类没有修改
报错4:untimeError: result type Float can't be cast to the desired output type __int64
把改成这个就可以了
indices.append((b, a, gj.clamp_(0, gain[3].long() - 1), gi.clamp_(0, gain[2].long() - 1))) # image, anchor, grid indices
到此我碰到的报错都在这,还有其他的问题,可以自行查阅
识别检测detect.py
调参
找到def parse_opt():这行,以下是我们要调参的位置
parser.add_argument('--weights', nargs='+', type=str, default='D:/Pycharm code/yolov5-5.0/runs/train/exp31/weights/last.pt', help='model.pt path(s)')(这里改成训练完的权重文件last.pt或者best.pt)
parser.add_argument('--source', type=str, default='D:/Pycharm code/yolov5-5.0/Car/datasets/images/test', help='source') # file/folder, 0 for webcam(测试数据,可以是图片/视频路径,也可以是’0’(电脑自带摄像头),也可以是rtsp等视频流)
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.25, help='object confidence threshold')(置信度阈值你希望多少)
parser.add_argument('--iou-thres', type=float, default=0.45, help='IOU threshold for NMS')
parser.add_argument('--device', default='0', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
















 635
635

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









