






原文链接:
产品链接:
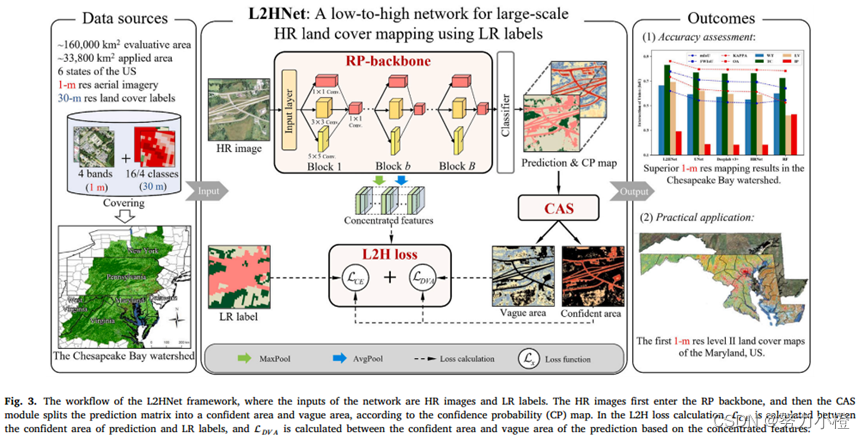
本文提出了一种低到高网络(L2HNet),仅以低分辨率的土地覆盖产品作为训练标签,从高分辨率图像自动生成高分辨率的土地覆盖地图。
首先,为了获得具有丰富细节的映射结果,我们提出了一种包含并行多尺度卷积层的分辨率保持(RP)骨干结构,用于提取图像的高分辨率特征;此外,为了解决分辨率不匹配引起的标签噪声问题,设计了一个自信区域选择(CAS)模块和一个低到高(L2H)损失函数,采用弱和无监督策略,从粗标签中获得可靠的监督信息。
L2HNet还被用于制作美国整个马里兰州的第一张具有二级分类层次的1米分辨率土地覆盖地图,该地图覆盖面积约为33,872 km2。马里兰州的土地覆盖地图可在http://hipag.whu.edu.cn/L2HNet.html上公开获取。
RP backbone: resolution-preserving backbone
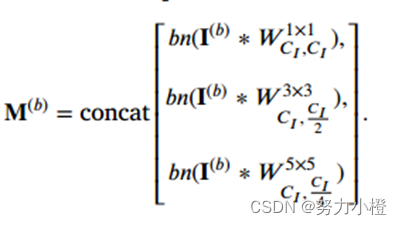
RP主干被设计成一个轻量级的多尺度结构,很简单:
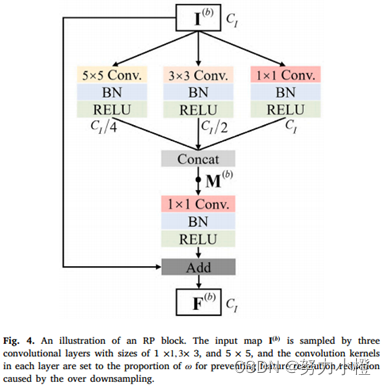

当𝐼= 64时,区块是一个轻量级的单元,只有52736个参数,因此包含5个区块的RP骨干比众所周知的ResNet-101骨干参数少约300倍。
Confident area selection (CAS) module
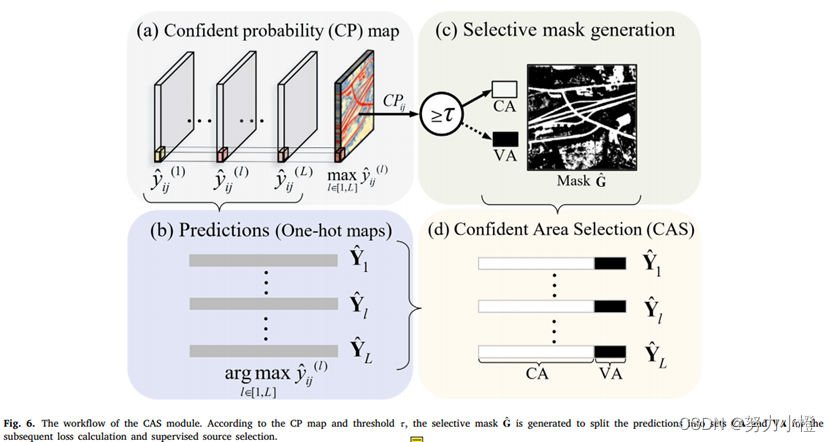
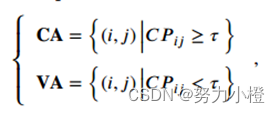
CAS模块根据预测的置信图,筛选高质量掩码,便于自己产生数据自己学习。在一个batch预测的时候,求出每个预测像素对应类别的概率的平均值t,根据下面划分CA和VA:(confident area;vague area)其中CA表示所包含像素的可靠性足够高,VA表示所包含像素是模糊预测的。
将VA点的像素改为类别0,这样产生了训练样本。
平常我以为这就结束了,下面就是我觉得论文考虑比较周到的地方:
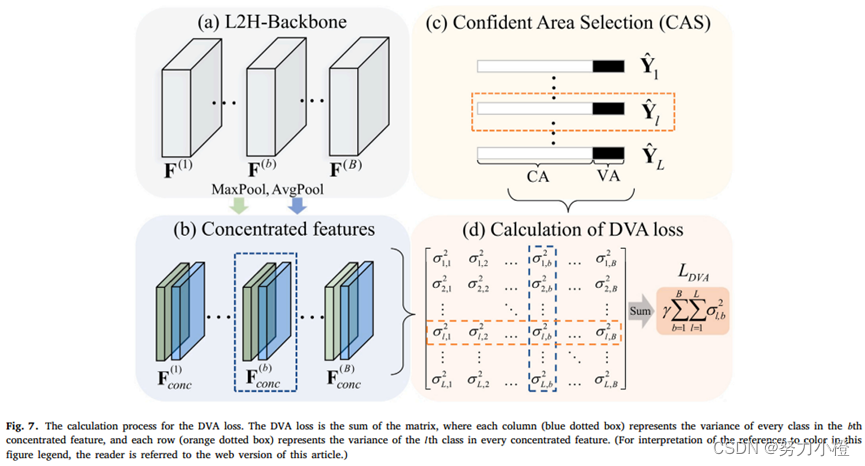
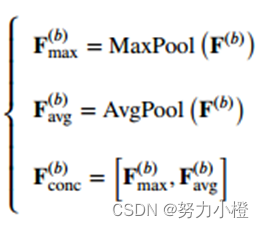
由于𝐕A中的预测仍然是无监督的,考虑到相同土地覆盖类别的特征相似性,设计无监督DVA损失来动态约束预测良好的𝐂A集合和无监督的𝐕A集合在特征空间中的类内方差。为了描述特征空间,如图7(a) - (b)所示,每个RP块中的融合特征映射F(𝑏)通过通道最大池化和平均池化进行集中。在沿着通道轴应用两个池化操作后,我们将它们连接起来以生成一个双通道特征描述符。𝑏th区块的池化操作和集中特征表示为:
为了测量区域间(即𝐂和𝐕)的特征相似度,基于类内方差理论设计了DVA损失,先对应特征图求平均值:
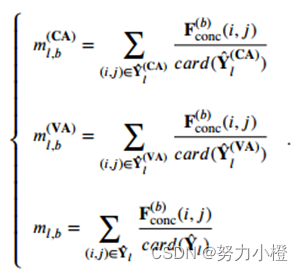
然后,通过计算区域间均值差的2范数,可以将𝑏th集中特征的类𝑙方差描述为:

Pl(CA)和Pl(VA)分别表示CA和VA占一幅图的比例。上面这个其实就是两个标量求个绝对值吧?
最后,如图7(d)所示,将DVA损失表示为在所有类和特征中,其具体形式可以表示为:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









