






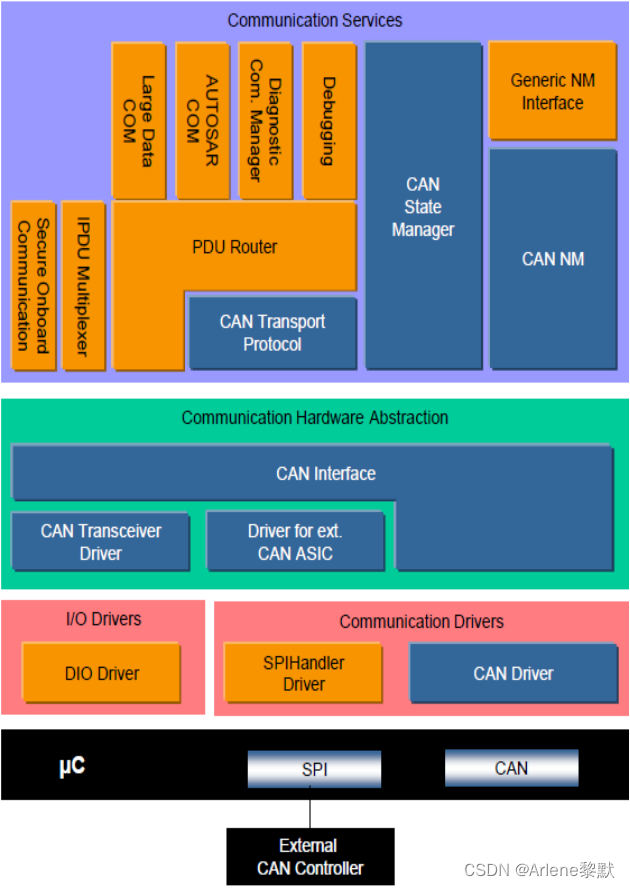
CAN transceiver:有SPI/DIO(1042)两个控制方式
CAN driver:分为内/外控制
CAN interface:用于分层内的不同接口进行统一接口;
SOC模式:报文加密算法,调用加密的软/硬件模块,以及判断报文是否被取出/修改,多为网关报文, cryto加密。
IPDUM:通信矩阵(用于DBC分页,一般不用)
PDUR:分流(对报文进行统一的识别之后进行分流),起到路由的作用。
CANTP:多帧传输的网络协议,一般用于握手功能。
CANSM:transceiver/control 外设状态机管理(硬件),
CANAM:当总线上存在多个ECU时进行网络状态管理,协调报文对其进行休眠或者唤醒。
COMM:对CANSM/CANAM进行管理;
DCM:诊断服务;
COM:在应用层用到的数据,流程大概为(信号-报文-发送/接收)判断节点的丢失,作为信号的路由,帧的路由;
LDCOM:以太网(大数据)-RTE-应用层
COMM:整合应用的作用。
被动唤醒:接收报文 interface—canam—comm—canam
Controller Area NETwork,采用500K的高速
·ISO11898 定义了通信速率为 125 kbps~1 Mbps 的高速 CAN 通信标准,属于闭环总线,传输速率可达1Mbps,总线长度 ≤ 40米。
·ISO11519 定义了通信速率为 10~125 kbps 的低速 CAN 通信标准,属于开环总线,传输速率为40kbps时,总线长度可达1000米。

















 278
278

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









