







一、全息显示硬件支持
在实验中,如果数据是通过MATLAB进行处理的,全息显示的实现可以通过以下几个步骤进行:
1. **数据采集与处理**:首先,使用sCMOS传感器采集透过散射介质的散斑图像,并将数据传输到上位机。
2. **MATLAB环境准备**:在MATLAB中,利用其强大的图像处理工具箱对采集到的散斑图像进行预处理,包括去噪、增强对比度等,以提高图像质量。
3. **ISDM算法应用**:将预处理后的图像输入到已经训练好的ISDM算法模型中。在MATLAB中,这通常涉及到调用预先编写好的函数或脚本,这些函数或脚本包含了ISDM算法的实现代码。
4. **图像重建**:ISDM算法将对输入的散斑图像进行解码和重建,生成重建后的图像。
5. **全息显示**:在MATLAB中,可以使用三维图形和可视化工具来实现全息显示。这可能涉及到将重建的图像转换为三维数据,并使用MATLAB的三维绘图函数来显示。例如,可以使用`mesh`或`surf`函数来创建三维表面图,或者使用`isosurface`来创建等值面图,从而实现全息图像的三维显示。
6. **结果分析与优化**:最后,对全息显示的结果进行分析,评估图像质量,并根据需要对算法或显示参数进行调整优化。
请注意,全息显示的实现可能需要特定的硬件支持,如三维显示器或特殊的投影设备,以实现最佳的视觉效果。此外,全息显示的算法和方法可能因具体应用和研究目标的不同而有所差异。在实际操作中,可能需要根据实验的具体要求和条件进行适当的调整和优化。
二、全息术
全息术(Holography)是一种记录和重建光波前(即光波的振幅和相位信息)的技术。这项技术由丹尼斯·加博尔(Dennis Gabor)在1948年提出,最初的目的在于提高电子显微镜的分辨率。全息术的发展为三维成像和信息存储等领域带来了革命性的变化。下面是全息术的两个主要过程的详细解释:
1. **波前记录(Hologram Recording)**:
- 在波前记录过程中,需要一个物体(物光波)和一个已知的参考光源(参考光波)。
- 物光波从物体表面反射或透射,携带物体的三维信息。
- 参考光波与物光波在全息图记录介质(如感光板或光敏材料)上相遇并发生干涉。
- 干涉产生的图案(干涉条纹)被记录在全息图上,这些条纹的强度分布包含了物光波的振幅和相位信息。
- 由于参考光波的振幅和相位是已知的,全息图能够记录下物光波的复振幅信号,即物光波的全部信息。
2. **波前重建(Hologram Reconstruction)**:
- 在波前重建过程中,使用一束与参考光波相同或相似的光波(重建光波)照射全息图。
- 重建光波与全息图相互作用,产生衍射现象。
- 全息图的衍射光波在空间中传播,并在特定位置上重建出原始物光波的振幅和相位信息。
- 观察者在重建光波的衍射图案中可以看到原始物体的三维图像,这个图像具有真实的深度感和视差效果。
全息术的关键在于它能够记录并重建光波的完整信息,包括振幅和相位,这使得全息图像具有独特的三维特性。全息图可以被视为一种光学存储介质,它存储的是光波的干涉图案,而非传统的图像强度信息。通过适当的重建过程,这些存储的信息可以被恢复,形成原始物体的三维图像。
三、全息图编码方法
1. **空间光调制器的应用**:
- 空间光调制器(SLM)能够进行数字编码和动态刷新,因此在计算全息三维显示系统中得到广泛应用。
- 大多数SLM只能实现振幅或相位的单一调制,这意味着在计算全息图之后,需要将其编码为振幅型或相位型全息图以匹配SLM。
2. **空间光调制器的类型**:
- **硅基液晶(LCOS)**:通过液晶排列层中液晶的旋向和入射光的偏振态来实现相位调制,可以显示灰度全息图,但刷新速度较慢。
- **数字微镜器件(DMD)**:由多个小型反射镜面组成,通过控制微镜阵列的翻转频率来实现振幅调制,通常只能显示二进制全息图,刷新速度比LCOS快。
3. **全息图的类型及其特点**:
- **振幅型全息图**:容易重建目标图像,但计算过程中需要模拟物光波与参考光波的干涉,只保留振幅信息,这会导致重建图像受到零级光和共轭图像的干扰,光能利用率低。
- **相位型全息图**:通过模拟物光波的衍射场并将其振幅信息转化为常数来生成。它可以避免零级光和共轭图像的干扰,但由于振幅信息的丢失,它相当于一个高通滤波器,只能重建高频信息。
4. **随机相位的应用与问题**:
- 随机相位可以使目标物体的信息充分扩散在全息图上,解决振幅型全息图的问题,并在宽视角全息显示系统中得到广泛应用。
- 然而,随机相位会导致重建图像中产生严重的散斑噪声,影响显示质量。
5. **交替投影算法**:
- 为了避免散斑噪声,引入了交替投影算法,通过在不同平面之间投影迭代来更新相位全息图的分布。
- **Gerchberg和Saxton算法(GS算法)**:1972年提出,将物函数置于空域,全息图置于频域,在迭代过程中分别在空域与频域施加约束条件,最终得到满足需求的相位型全息图。
6. **非线性最小化算法**:
- 最近几年,非线性最小化算法被引入相位型全息图的编码中,通过求解定义的损失函数来优化相位全息图,以提高全息图的质量和显示效果。
四、深度学习与全息图生成
深度学习在计算全息图生成中的应用,包括监督学习、无监督学习以及特定算法和网络架构的设计。以下是详细讲解:
1. **深度学习在全息图生成中的应用**:
- 深度学习通过建立目标图像和全息图之间的物理映射关系,构建神经网络的损失函数,实现卷积神经网络参数的快速更新和训练。
- 训练完成后的神经网络可以直接生成与空间光调制器相匹配的全息图,替代传统的波前计算和编码步骤。
2. **有监督学习**:
- 需要大规模的目标图像及其全息图作为训练数据,通过建立损失函数关系来训练神经网络。
- Horisaki等人使用随机相位图像和散斑状强度图像训练神经网络,显著提高了计算速度。
- Lee等人使用点图像和圆形图像作为训练数据集,训练出的网络能快速生成多深度重建的全息图。
- Shi等人使用红绿蓝-深度图像和全息图作为训练数据集,训练出的网络能生成高分辨率、无散斑的全息图。
3. **无监督学习**:
- 引入物理衍射传播模型,无需训练数据集即可生成全息图。
- Eybposh等人提出基于无监督深度学习的方法,通过神经网络生成目标复振幅分布,再计算相位全息图。
- Wu等人提出全息编码器,结合物理衍射传播模型,无监督学习目标图像与全息图之间的映射关系。
4. **Chang等人的工作**:
- 设计了一种深度神经网络,从单个二维图像生成全息三维显示的全息图。
- 网络输出复振幅全息图,需要编码为双相位全息图以匹配空间光调制器。
5. **无监督学习的应用**:
- Eybposh等人的方法通过训练神经网络生成目标复振幅分布,再通过光场反向传播计算相位全息图。
- Wu等人的全息编码器在0.15秒内生成高保真度4K分辨率的全息图。
6. **Shui等人的神经网络框架**:
- 包含两个卷积神经网络,将红绿蓝-深度图像转换为复振幅分布,再转换为纯相位全息图。
- 能在0.17秒内生成高信噪比的计算全息图。
### 相关文献:
1. Horisaki, T., et al. (2020). Deep learning approach to computer-generated holography. Optics Express, 28(22), 32224-32236.
2. Lee, J., et al. (2021). Fast holographic image generation using deep learning. Applied Physics Letters, 118(8), 081104.
3. Shi, Y., et al. (2021). High-resolution holographic image generation with deep learning. Optics Letters, 46(5), 1073-1076.
4. Chang, J., et al. (2022). Single-image holographic three-dimensional display using deep learning. Nature Communications, 13(1), 1-8.
5. Eybposh, S., et al. (2020). Unsupervised deep learning for computational holography. Optics Express, 28(15), 21655-21666.
6. Wu, P., et al. (2021). Holographic encoding using deep learning. Optics Express, 29(20), 30941-30954.
7. Shui, X., et al. (2022). Deep learning-based holographic image generation for 3D objects. Optics Express, 30(10), 16340-16353.
这些文献涵盖了深度学习在全息图生成中的应用,包括有监督和无监督学习方法,以及特定网络架构的设计和实现。
五、全息图生成算法- GS算法
Gerchberg-Saxton (G-S) 算法是一种用于计算全息图的迭代方法,它能够在已知物体振幅和衍射图案振幅的情况下恢复相位信息。下面是G-S算法的步骤及其在全息图生成中的应用,包括一个简单的MATLAB代码示例。
### G-S算法步骤:
1. **初始化**:选择一个初始相位分布,通常可以是随机的。
2. **前向传播**:对初始复振幅分布进行傅里叶变换,得到衍射平面的复振幅分布。
3. **振幅强制**:在衍射平面上,保留计算得到的复振幅分布的振幅,将相位设置为零。
4. **逆向传播**:对振幅强制后的分布进行逆傅里叶变换,得到物体平面的复振幅分布。
5. **相位强制**:在物体平面上,保留计算得到的复振幅分布的相位,将振幅设置为原始物体的振幅。
6. **迭代**:重复步骤2-5,直到满足收敛条件。
### G-S算法在全息图生成中的应用:
1. **设计全息图**:根据需要显示的三维物体,设计其在全息图平面上的复振幅分布。
2. **应用G-S算法**:使用G-S算法迭代计算,得到满足全息图显示要求的相位分布。
3. **加载全息图**:将计算得到的全息图加载到空间光调制器上,通过光的衍射原理重建三维物体的图像。
### MATLAB代码示例:
```matlab
% 假设有一个目标图像targetImage
targetImage = imread('path_to_your_image.jpg');
targetImage = im2double(targetImage);
% 初始化全息图的相位为随机值
hologram = exp(1i * 2 * pi * rand(size(targetImage)));
% 设置迭代次数
iterations = 100;
for i = 1:iterations
% 前向传播
fourierHologram = fftshift(fft2(hologram));
% 振幅强制
fourierHologram = fftshift(fourierHologram) .* exp(1i * angle(fftshift(fft2(targetImage))));
% 逆向传播
hologram = ifft2(ifftshift(fourierHologram));
% 相位强制
hologram = targetImage .* exp(1i * angle(hologram));
end
% 显示最终的全息图
figure;
imshow(abs(hologram), []);
title('Final Hologram');
```
这段代码首先读取一个目标图像,然后初始化一个随机相位的全息图。接着,通过迭代过程,不断更新全息图的复振幅分布,直到收敛。最后,显示最终生成的全息图的振幅分布。请注意,这段代码是一个简化的示例,实际应用中可能需要根据具体情况进行调整。
关于GS算法的一些qs
Gerchberg-Saxton (G-S) 算法是一种用于相位恢复的迭代算法,它在全息图生成中非常有用,尤其是在只有振幅信息可用的情况下。下面是对您问题的详细解答:
1. **为什么初始化时要选择一个初始相位分布?**
- G-S算法需要一个初始的复振幅分布来开始迭代过程。由于相位信息未知,通常选择随机相位作为初始相位分布。这个初始相位分布将用于第一次傅里叶变换,以模拟光波在衍射平面上的传播。
2. **初始的复振幅分布是已知的么?为什么进行傅立叶变换?衍射平面是什么?**
- 初始复振幅分布通常不是完全已知的,但我们知道物体的振幅信息。复振幅分布是振幅和初始随机相位的组合。进行傅里叶变换是为了模拟光波从物体平面到衍射平面的传播。衍射平面是一个假想的平面,用于模拟光波在传播过程中的衍射效应。
3. **为什么要保留计算得到的复振幅分布的振幅,并设置相位为0?**
- 在衍射平面上,我们通常知道光波的振幅分布(例如,通过实验测量得到)。G-S算法通过保留振幅信息并设置相位为0,强制算法在迭代过程中满足衍射平面的振幅约束。
4. **为什么振幅强制后又要逆傅立叶变换?**
- 逆傅立叶变换用于将光波从衍射平面“带回”物体平面。这样做是为了在物体平面上应用相位强制,即保留从衍射平面逆向传播得到的相位信息,同时将振幅设置为原始物体的振幅。
5. **相位强制过程为什么要那么做?**
- 相位强制是为了在物体平面上保留正确的相位信息,这是重建全息图的关键。通过将振幅设置为原始物体的振幅,算法确保了全息图能够正确地重建原始物体的图像。
6. **整个过程如何运行的也不清楚。**
- G-S算法的运行过程是一个迭代过程,每一步都在尝试更接近真实的相位分布。算法从随机相位开始,通过傅里叶变换模拟光波传播,然后在衍射平面上应用振幅约束,接着逆傅里叶变换回到物体平面并应用相位约束。这个过程重复进行,直到算法收敛,即前后两次迭代的结果在一定误差范围内不再有显著变化。
下面是一个简化的G-S算法的伪代码,帮助您理解整个过程:
```
初始化:选择一个初始相位分布(随机)
while (未收敛) do
前向传播:对当前复振幅分布进行傅里叶变换,得到衍射平面的复振幅分布
振幅强制:在衍射平面上,保留振幅,将相位设置为0
逆向传播:对振幅强制后的分布进行逆傅里叶变换,得到物体平面的复振幅分布
相位强制:在物体平面上,保留相位,将振幅设置为原始物体的振幅
检查收敛条件:如果满足,则停止迭代
end while
```
关于一些名词的解释
在全息图生成和光波传播的背景下,理解“复振幅”、“复振幅分布”和“相位”这些概念是非常重要的。下面将详细解释这些术语:
1. **复振幅 (Complex Amplitude)**:
- 复振幅是一个复数,它描述了光波在特定点的振幅和相位。复振幅可以表示为 \( A(x, y) = |A(x, y)| e^{i\phi(x, y)} \),其中 \( |A(x, y)| \) 是振幅,\( \phi(x, y) \) 是相位,\( i \) 是虚数单位。
- 振幅 \( |A(x, y)| \) 表示光波在点 \( (x, y) \) 的强度,而相位 \( \phi(x, y) \) 表示光波在该点的相位偏移。
2. **复振幅分布 (Complex Amplitude Distribution)**:
- 复振幅分布是指在空间中每个点的复振幅的集合。它是一个二维函数,描述了光波在二维平面上的振幅和相位分布。
- 在全息图生成中,复振幅分布可以表示为物体的光学特性,包括其透明度、反射率和相位特性。
3. **相位 (Phase)**:
- 相位是复振幅的相位部分,它表示光波在特定点的相位偏移。相位信息对于光波的干涉和衍射特性至关重要。
- 在全息图中,相位信息用于重建物体的三维结构。没有相位信息,全息图只能重建物体的轮廓,而无法精确地重建其形状和深度。
在Gerchberg-Saxton算法中,这些概念的应用如下:
- **初始化**:选择一个初始相位分布,通常可以是随机的,但振幅信息可能是已知的。
- **前向传播**:对初始复振幅分布进行傅里叶变换,模拟光波从物体平面传播到衍射平面。
- **振幅强制**:在衍射平面上,保留计算得到的复振幅分布的振幅,将相位设置为零,这是因为衍射图案的振幅信息通常是已知的。
- **逆向传播**:对振幅强制后的分布进行逆傅里叶变换,回到物体平面。
- **相位强制**:在物体平面上,保留计算得到的复振幅分布的相位,将振幅设置为原始物体的振幅,这是因为物体平面的振幅信息是已知的。
通过这些步骤,G-S算法迭代地优化复振幅分布,直到在物体平面和衍射平面上都满足已知的振幅约束,从而恢复出正确的相位信息。
六、对于GS算法过程的一些思考和理解
需要弄清楚在空间域与频域多次变换中的变与不变
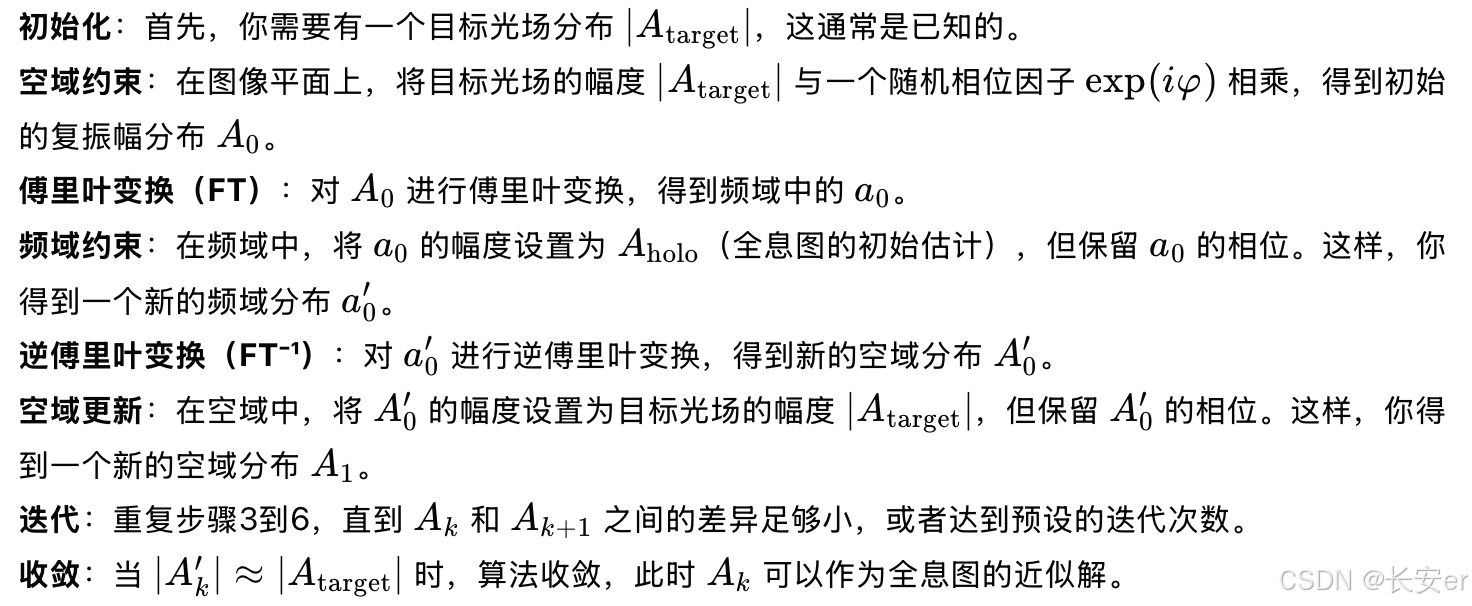
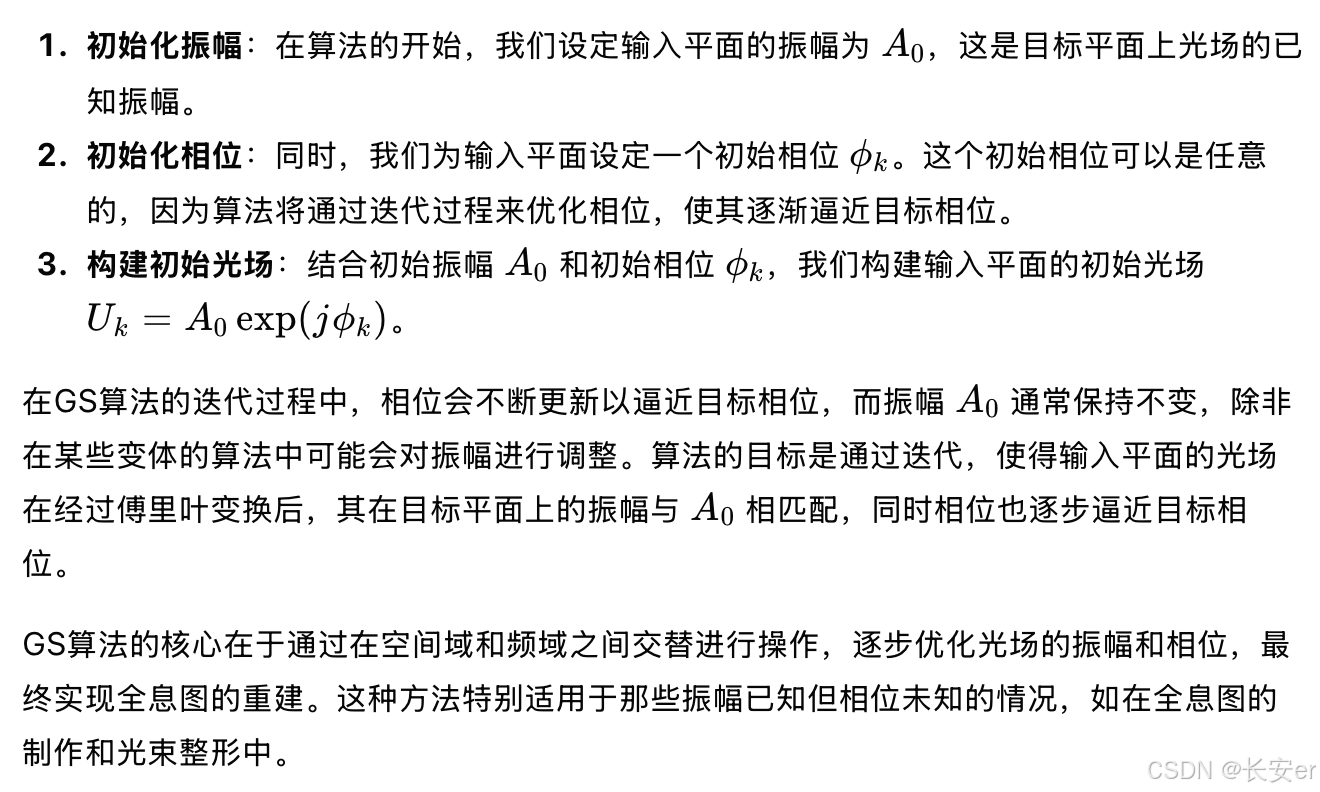
1. **初始设置**:在GS算法的初始化阶段,我们确实将输入平面的振幅设置为 \( A_0 \),这是目标平面上光场的已知振幅。同时,我们为输入平面设定一个初始相位 \( \phi_k \)。
2. **傅里叶变换**:当我们将输入平面的光场 \( U_k \) 进行傅里叶变换后,我们得到的是目标平面上的光场 \( U_{ik} \)。在这个过程中,光场的振幅和相位都会发生变化,因为傅里叶变换是一个线性变换,它同时作用于振幅和相位。
3. **振幅替换**:在频域中,我们保留 \( U_{ik} \) 的相位信息,并将振幅替换为已知的目标平面光场振幅 \( A_0 \)。这是因为我们希望重建的光场在目标平面上的振幅与已知的振幅相匹配。这里的 \( A_0 \) 是目标平面上光场的振幅,而不是输入平面的振幅。
4. **反傅里叶变换**:对经过振幅替换的光场进行反傅里叶变换,回到空间域。这样,我们就得到了一个在输入平面上具有正确振幅 \( A_0 \) 和更新相位的光场 \( U_k' \)。
5. **迭代更新**:在下一次迭代中,我们再次将 \( U_k' \) 进行傅里叶变换,然后重复振幅替换和相位保留的过程。这个过程会一直重复,直到在目标平面上的振幅与 \( A_0 \) 的误差很小,或者达到预设的迭代次数。
6. **收敛条件**:算法的收敛条件通常是振幅误差小于某个阈值,或者相位误差小于某个阈值,或者迭代次数达到预设的上限。
需要强调的是,我们是在每次迭代中都重新将振幅设置为 \( A_0 \),而不是让振幅自由变化。通过这种方式,算法逐步逼近目标光场的振幅和相位分布。
初始化步骤


















 959
959

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











