







目录
1.线性系统的时域性能指标
线性系统的时域性能指标是在单位阶跃函数作用下的响应指标
1.1延迟时间
响应曲线第一次到达最大值一半的时间
1.2上升时间
响应曲线第一次到达稳态值的时间
1.3峰值时间
响应曲线第一次到达峰值的时间
1.4调节时间
响应曲线第一次到达区间[0.95,1.05
]内的时间(或者2%)
1.5超调量
1.6稳态误差
2.一阶系统的时域分析
2.1一阶系统的单位阶跃响应
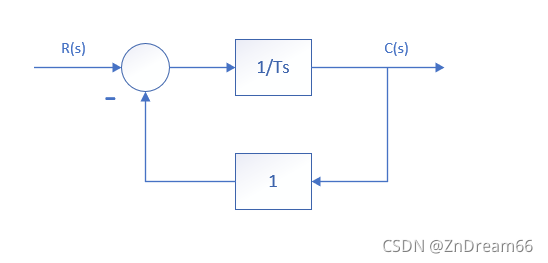
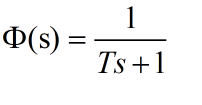
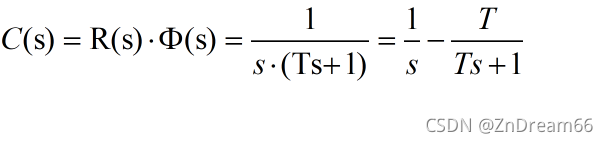
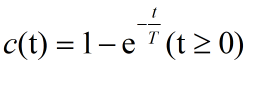
可以看到一阶系统的单位阶跃响应随着指数函数单调上升,稳态值为1。
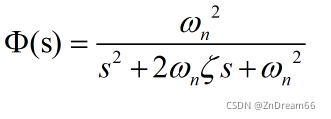
3.二阶系统的时域分析
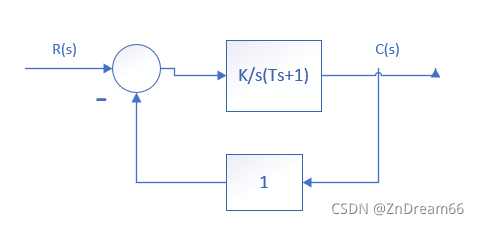
3.1二阶系统的单位阶跃响应
特征根为
3.1.1过阻尼( )
)
在这情况下闭环传递函数的两个极点都是实数,则响应曲线为单调函数,利用终值定理和初值定理可以得到响应曲线初始为0,终值为1,所有函数曲线单调递增,当增大时一个极点逐渐远离原点,一个极点逐渐靠近原点,远离原点的极点的影响可以忽略不计,可以把这时候的二阶系统简化为一阶系统分析,工程上当
便可近似为一阶分析。如果s2到原点的距离超过了s1到原点距离的四倍,则调节时间
.
3.1.2临界阻尼( )
)
此情况下两个闭环极点重合


该响应曲线也是单调递增的,初值为0终值为1,而且快速性比较好 。
3.1.3零阻尼( )
)
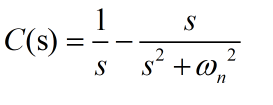
![]()
响应曲线是振幅为一,角频率为的等幅振荡。
3.1.4欠阻尼( )
)
当时,闭环函数的两个极点是共轭复数,
,响应曲线是振荡曲线,欠阻尼二阶系统的单位阶跃响应为:
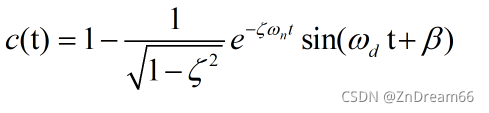
其中,极点的实部
为衰减系数决定了衰减的快慢,极点的虚部为振荡 频率,其中
,称为阻尼角。可以知道阻尼系数对二阶系统单位阶跃响应有很大影响,当
越小时,系统的上升时间越短但平稳性差,
增大时,超调量减小,衰减加快,振荡性降低,平稳性好,
增大到1及大于1以后,响应变为非周期无振荡的,但响应速度明显变慢,通常取
=0.4~0.8,此时系统的超调量适度,调节时间较短,工程上将
=0.707附近的系统称为二阶最优系统,0.707为最佳阻尼系数。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











