






目录
前言
今天清理电脑发现了上学期做的八路抢答器仿真设计文件,删了可惜,分享出来大家一起学习。
设计目标
1、主持人按下抢答开始按键,抢答者才可以开始抢答,数码管抢答倒计时30s。
2、抢答成功后显示抢答选手编号。
3、可以通过按键修改倒计时时间。
4、抢答成功后绿色指示灯闪烁。
仿真设计
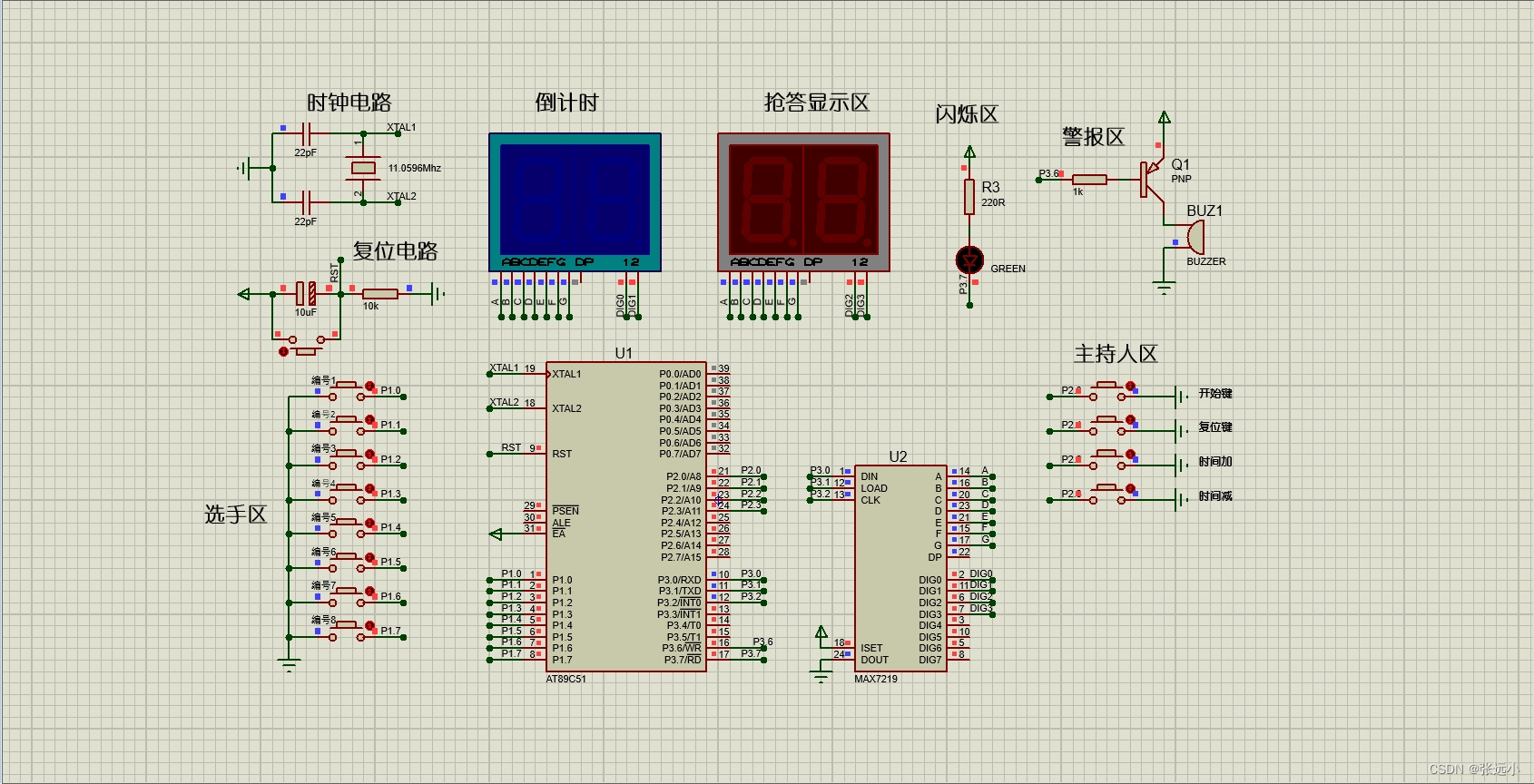
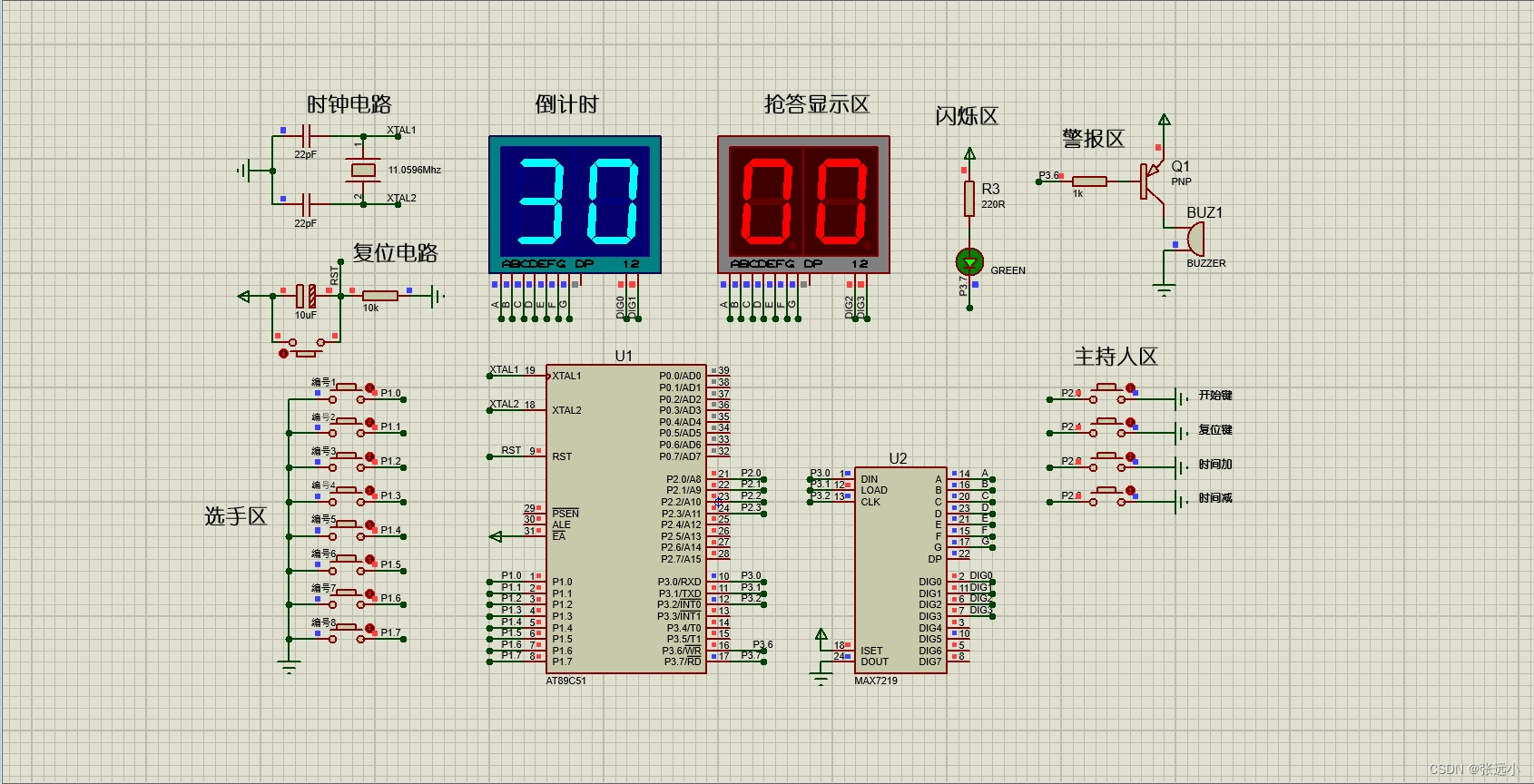
Proteus版本为8.9。整体仿真图如下所示:

蜂鸣器记得设置一下,要不然不会响
分析:
点击仿真开始后,倒计时和抢答显示区不会显示数字(本来就是不显示的,别担心是你哪里弄错了)。如下图所示:
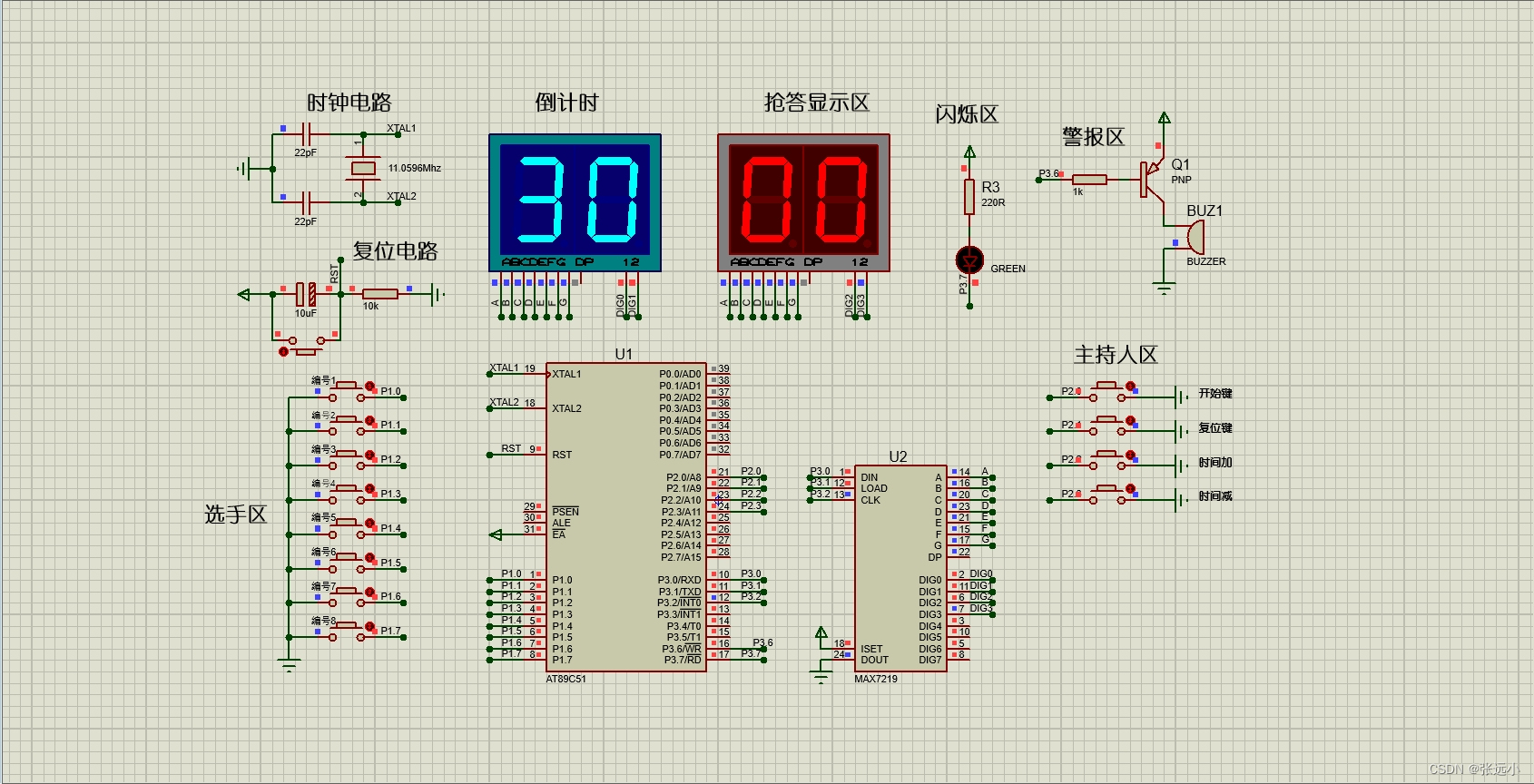
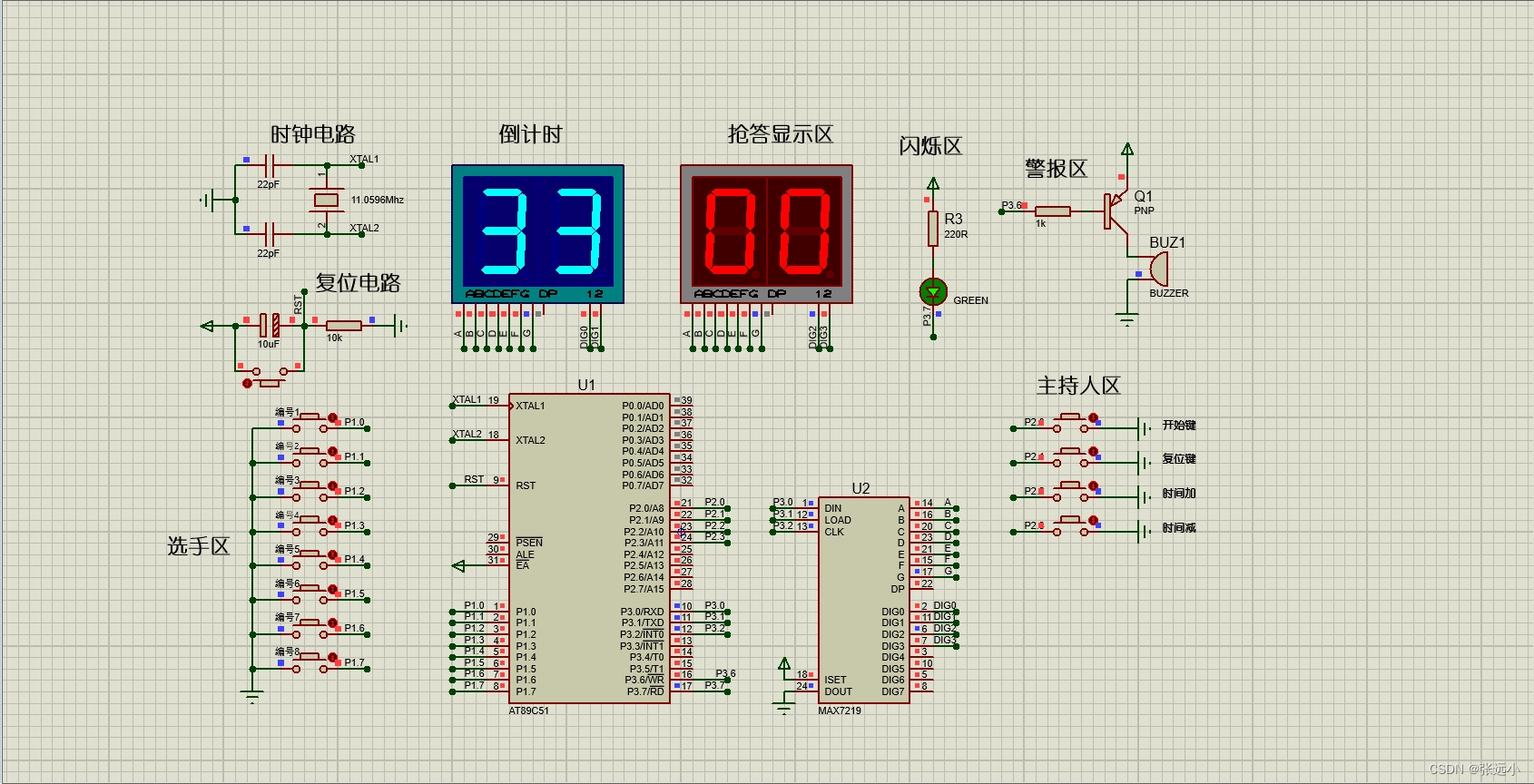
点击主持人区的开始键后,倒计时从30s开始倒计时,抢答显示区显示00.如下图所示:
当1-8号中有选手抢答时,倒计时会停止,抢答显示区会显示抢答选手编号,绿色指示灯会不停闪烁,蜂鸣器也会响一下。如下如所示: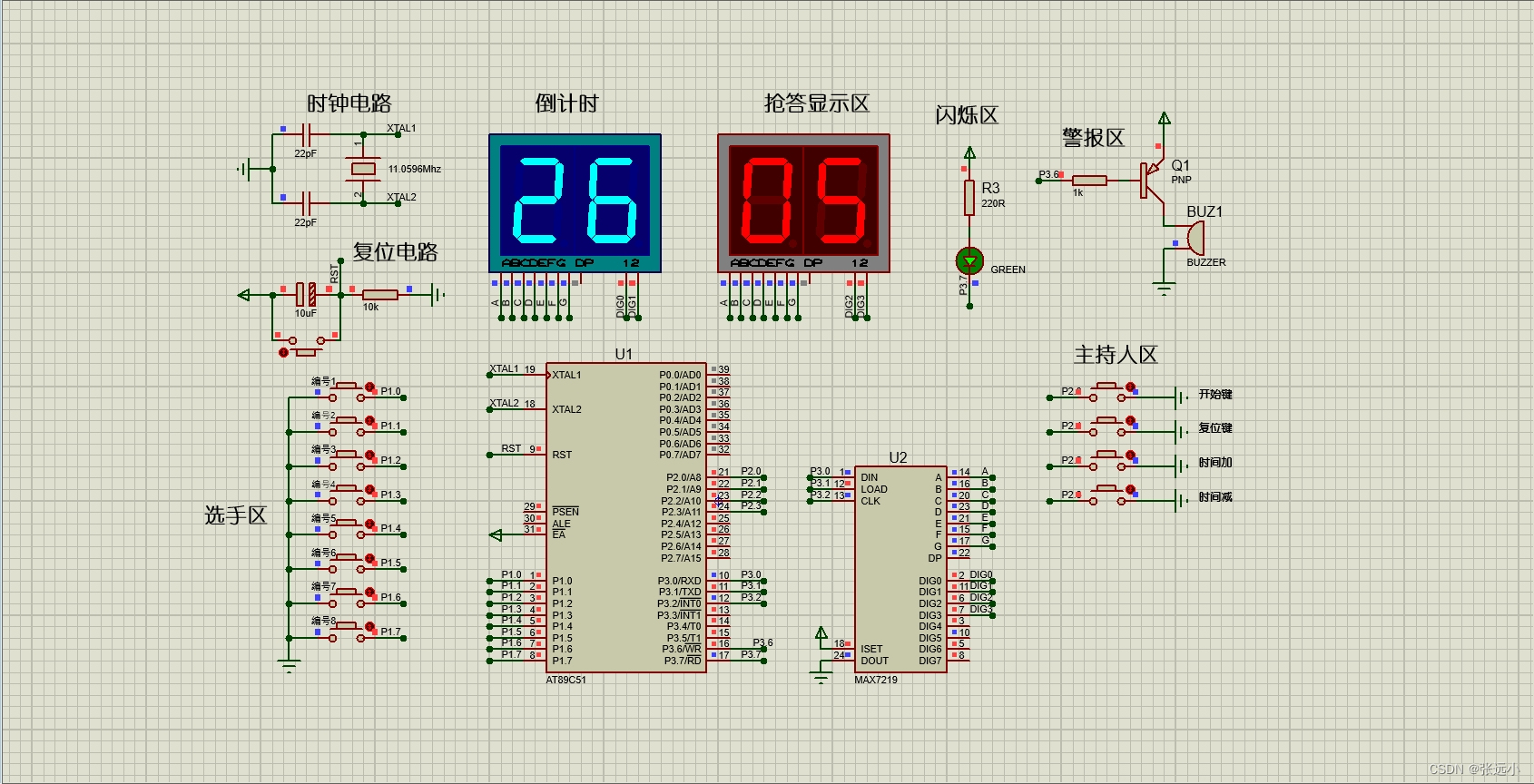
然后复位键的作用是在抢答结束后,将倒计时复位到30s,具体操作步骤是:在抢答完成后,就是有选手抢答后,点击一下,倒计时会回到30,同时显示区显示00.如下图所示:
然后时间加和时间减的作用是改变倒计时。记住,刚开始第一次不能立马就改变倒计时,第一次必须是30s倒计时,因为刚开始啥也不显示,点加减也没用。当第一次30s倒计时内有人抢答后,你可以直接就点击时间加或减;又或者点一下复位键,让倒计时变为30后,再加减,其实都一样。改变时间后,点一下开始就开始倒计时了。如下图所示:
如果没有人抢答,倒计时结束,蜂鸣器会响一下。
程序代码
程序编写使用keil平台,编译0错误,0警告
#include<reg51.h>
#define uint unsigned int
#define uchar unsigned char
sbit DIN=P3^0; //与max7219接口定义
sbit LOAD=P3^1;
sbit CLK=P3^2;
sbit key0=P1^0; //8路抢答器按键
sbit key1=P1^1;
sbit key2=P1^2;
sbit key3=P1^3;
sbit key4=P1^4;
sbit key5=P1^5;
sbit key6=P1^6;
sbit key7=P1^7;
sbit buzzer=P3^6;//蜂鸣器
sbit LED1=P3^7;
sbit begin=P2^0; //主持人开始按键
sbit key_clear=P2^1; //主持人复位
sbit key_add=P2^2; //时间加
sbit key_sub=P2^3; //时间减
uchar second=30; //秒表计数值
uchar counter=0; //counter每100,minite加1
uchar people=0; //抢答结果
uchar num_add[]={0x01,0x02,0x03,0x04,0x05,0x06,0x07,0x08}; //max7219读写地址、内容
uchar num_dat[]={0x80,0x81,0x82,0x83,0x84,0x85,0x86,0x87,0x88,0x89};
void delay(uint xms)
{
uchar i, j;
while(xms--)
{
i = 2;
j = 239;
do
{
while (--j);
} while (--i);
}
}
uchar keyscan()//键盘扫描函数
{
uchar key_value,temp;
key_value=0;
P1=0xFF;
temp=P1;
if(~(P1&temp))
{
switch(temp)
{
case 0xfe:
key_value=1;
break;
case 0xfd:
key_value=2;
break;
case 0xfb:
key_value=3;
break;
case 0xf7:
key_value=4;
break;
case 0xef:
key_value=5;
break;
case 0xdf:
key_value=6;
break;
case 0xbf:
key_value=7;
break;
case 0x7f:
key_value=8;
break;
default:
key_value=0;
break;
}
}
return key_value;
}
void max7219_send(uchar add,uchar dat)//向max7219写指令函数
{
uchar ADS,i,j;
LOAD=0;
i=0;
while(i<16)
{
if(i<8)
{
ADS=add;
}
else
{
ADS=dat;
}
for(j=8;j>=1;j--)
{
DIN=ADS&0x80;
ADS=ADS<<1;
CLK=1;
CLK=0;
}
i=i+8;
}
LOAD=1;
}
void max7219_init()//max7219初始化函数
{
max7219_send(0x0c,0x01);
max7219_send(0x0b,0x07);
max7219_send(0x0a,0xf5);
max7219_send(0x09,0xff);
}
void time_display(uchar x)//时间显示
{
uchar i,j;
i=x/10;
j=x%10;
max7219_send(num_add[1],num_dat[j]);
max7219_send(num_add[0],num_dat[i]);
}
void scare_display(uchar x)//抢答结果显示
{
uchar i,j;
i=x/10;
j=x%10;
max7219_send(num_add[3],num_dat[j]);
max7219_send(num_add[2],num_dat[i]);
if(x >= 1 && x <= 8)
{
LED1=~LED1;
delay(100);
}
}
void holderscan()//抢答时间设置,0-60s
{
time_display(second);
scare_display(people);
if(~key_clear)//如果有键按下,改变抢答时间
{
while(~key_clear);
if(people)//如果抢答结果没有清空,抢答器重置
{
second=30;
people=0;
}
else
{}
}
if(~key_add)
{
while(~key_add);
if(second<60)
{
second++;
}
else
{
second=0;
}
}
if(~key_sub)
{
while(~key_sub);
if(second>0)
{
second--;
}
else
{
second=60;
}
}
}
void timer_init()
{
EA=1;
ET0=1;
TMOD=0x01;
TH0=0xd8;//设定10ms中断一次
TL0=0xef;
}
void main()
{
while(1)
{
do
{
holderscan();
}while(begin);//开始前进行设置,未按下开始键
while(~begin);//防抖
max7219_init(); //芯片初始化
timer_init(); //中断初始化
TR0=1; //开始中断
do
{
time_display(second);
scare_display(people);
people=keyscan();
}while((!people)&&(second));//运行直到抢答结束或者时间结束
TR0=0;
buzzer = 0;
delay(100);
buzzer = 1;
}
}
void timer0() interrupt 1
{
TH0=0xd8;//重新装载
TL0=0xef;
TR0=1;
if(counter<100)
{
counter++;
}
else
{
counter=0;
second=second-1;
}
}总结
以上就是今天要讲的内容。

















 1718
1718

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









