






目录
习题5-7 忽略激活函数,分析卷积网络中卷积层的前向计算和反向传播是一种转置关系。
习题5-2 证明宽卷积具有交换性
首先,宽卷积定义为 ,其中
,其中 表示宽卷积运算,我们不妨先设一个二维图像
和一个二维卷积核
,然后对该二维图像X进行零填充,两端各补U-1 和V-1 个零,得到全填充的图像
现有
根据宽卷积定义
为了让x的下标形式和w的进行对换,进行变量替换
令, 故
则
已知
因此对于
由于宽卷积的条件,s和t的变动范围是可行的。
习题5-3 分析卷积神经网络中1 1卷积核的作用
1卷积核的作用
升维降维1*1卷积是大小为1*1的滤波器做卷积操作,不同于2*2、3*3等filter,没有考虑在前一特征层局部信息之间的关系。升维是用最少的参数拓宽网络,降维缩减网络通道数,减少参数,减少计算量。
增加非线性特性1*1卷积核,可以在保持特征图尺度不变的(即不损失分辨率)的前提下大幅增加非线性特性(利用后接的非线性激活函数),把网络做的很深。备注:一个卷积核对应卷积后得到一个特征图,不同的卷积权重,卷积以后得到不同的特征图,提取不同的特征。
跨通道信息互换(channal的变换)GoogLeNet利用1×1的卷积降维后,得到了更为紧凑的网络结构,虽然总共有22层,但是参数数量却只是8层的AlexNet的十二分之一。
习题5-4 对于一个输入为100×100×256的特征映射组,使用3×3的卷积核,输出为100×100×256的特征映射组的卷积层,求其时间和空间复杂度。如果引入一个1×1的卷积核,先得到100×100×64的特征映射,再进行3×3的卷积,得到100×100×256的特征映射组,求其时间和空间复杂度。
3×3
时间复杂度:
空间复杂度:
1×1
时间复杂度:
空间复杂度:
习题5-7 忽略激活函数,分析卷积网络中卷积层的前向计算和反向传播是一种转置关系。
以一个3×3的卷积核为例,输入为X输出为Y
将4×4的输入特征展开为16×1的矩阵,y展开为4×1的矩阵,将卷积计算转化为矩阵相乘

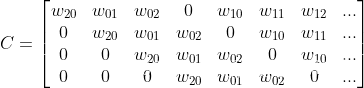

由
而
即
所以
综上可以看出前向计算和反向传播是一种转置关系。
选做推导CNN反向传播算法
CNN主要分为汇聚层(池化层)和卷积层反向传播的推导
其中池化层的反向传播比较容易理解,以最大池化举例,如下图,池化后的数字6对应于池化前的红色区域,实际上只有红色区域中最大值数字6对池化后的结果有影响,权重为1,而其它的数字对池化后的结果影响都为0。假设池化后数字6的位置delta误差为 ,误差反向传播回去时,红色区域中最大值对应的位置delta误差即等于 ,而其它3个位置对应的delta误差为0。
因此,在卷积神经网络最大池化前向传播时,不仅要记录区域的最大值,同时也要记录下来区域最大值的位置,方便delta误差的反向传播。
而平均池化就更简单了,由于平均池化时,区域中每个值对池化后结果贡献的权重都为区域大小的倒数,所以delta误差反向传播回来时,在区域每个位置的delta误差都为池化后delta误差除以区域的大小。

然后卷积层就是通过张量卷积,或者说若干个矩阵卷积求和而得到当前层的输出,这和一般的网络直接进行矩阵乘法得到当前层的输出不同。这样在卷积层反向传播的时候,上一层误差的递推计算方法肯定有所不同。
对于卷积层,由于W使用的运算是卷积,那么由该层误差推导出该层的所有卷积核的W,b的方式也不同。由于卷积层可以有多个卷积核,各个卷积核的处理方法是完全相同且独立的。
选做pyorch实现卷积层和池化层反向传播算子
卷积层:
from typing import Dict, Tuple
import numpy as np
import pytest
import torch
def conv2d_forward(input: np.ndarray, weight: np.ndarray, bias: np.ndarray,
stride: int, padding: int) -> Dict[str, np.ndarray]:
"""2D Convolution Forward Implemented with NumPy
Args:
input (np.ndarray): The input NumPy array of shape (H, W, C).
weight (np.ndarray): The weight NumPy array of shape
(C', F, F, C).
bias (np.ndarray | None): The bias NumPy array of shape (C').
Default: None.
stride (int): Stride for convolution.
padding (int): The count of zeros to pad on both sides.
Outputs:
Dict[str, np.ndarray]: Cached data for backward prop.
"""
h_i, w_i, c_i = input.shape
c_o, f, f_2, c_k = weight.shape
assert (f == f_2)
assert (c_i == c_k)
assert (bias.shape[0] == c_o)
input_pad = np.pad(input, [(padding, padding), (padding, padding), (0, 0)])
def cal_new_sidelngth(sl, s, f, p):
return (sl + 2 * p - f) // s + 1
h_o = cal_new_sidelngth(h_i, stride, f, padding)
w_o = cal_new_sidelngth(w_i, stride, f, padding)
output = np.empty((h_o, w_o, c_o), dtype=input.dtype)
for i_h in range(h_o):
for i_w in range(w_o):
for i_c in range(c_o):
h_lower = i_h * stride
h_upper = i_h * stride + f
w_lower = i_w * stride
w_upper = i_w * stride + f
input_slice = input_pad[h_lower:h_upper, w_lower:w_upper, :]
kernel_slice = weight[i_c]
output[i_h, i_w, i_c] = np.sum(input_slice * kernel_slice)
output[i_h, i_w, i_c] += bias[i_c]
cache = dict()
cache['Z'] = output
cache['W'] = weight
cache['b'] = bias
cache['A_prev'] = input
return cache
def conv2d_backward(dZ: np.ndarray, cache: Dict[str, np.ndarray], stride: int,
padding: int) -> Tuple[np.ndarray, np.ndarray, np.ndarray]:
"""2D Convolution Backward Implemented with NumPy
Args:
dZ: (np.ndarray): The derivative of the output of conv.
cache (Dict[str, np.ndarray]): Record output 'Z', weight 'W', bias 'b'
and input 'A_prev' of forward function.
stride (int): Stride for convolution.
padding (int): The count of zeros to pad on both sides.
Outputs:
Tuple[np.ndarray, np.ndarray, np.ndarray]: The derivative of W, b,
A_prev.
"""
W = cache['W']
b = cache['b']
A_prev = cache['A_prev']
dW = np.zeros(W.shape)
db = np.zeros(b.shape)
dA_prev = np.zeros(A_prev.shape)
_, _, c_i = A_prev.shape
c_o, f, f_2, c_k = W.shape
h_o, w_o, c_o_2 = dZ.shape
assert (f == f_2)
assert (c_i == c_k)
assert (c_o == c_o_2)
A_prev_pad = np.pad(A_prev, [(padding, padding), (padding, padding),
(0, 0)])
dA_prev_pad = np.pad(dA_prev, [(padding, padding), (padding, padding),
(0, 0)])
for i_h in range(h_o):
for i_w in range(w_o):
for i_c in range(c_o):
h_lower = i_h * stride
h_upper = i_h * stride + f
w_lower = i_w * stride
w_upper = i_w * stride + f
input_slice = A_prev_pad[h_lower:h_upper, w_lower:w_upper, :]
# forward
# kernel_slice = W[i_c]
# Z[i_h, i_w, i_c] = np.sum(input_slice * kernel_slice)
# Z[i_h, i_w, i_c] += b[i_c]
# backward
dW[i_c] += input_slice * dZ[i_h, i_w, i_c]
dA_prev_pad[h_lower:h_upper,
w_lower:w_upper, :] += W[i_c] * dZ[i_h, i_w, i_c]
db[i_c] += dZ[i_h, i_w, i_c]
if padding > 0:
dA_prev = dA_prev_pad[padding:-padding, padding:-padding, :]
else:
dA_prev = dA_prev_pad
return dW, db, dA_prev
@pytest.mark.parametrize('c_i, c_o', [(3, 6), (2, 2)])
@pytest.mark.parametrize('kernel_size', [3, 5])
@pytest.mark.parametrize('stride', [1, 2])
@pytest.mark.parametrize('padding', [0, 1])
def test_conv(c_i: int, c_o: int, kernel_size: int, stride: int, padding: str):
# Preprocess
input = np.random.randn(20, 20, c_i)
weight = np.random.randn(c_o, kernel_size, kernel_size, c_i)
bias = np.random.randn(c_o)
torch_input = torch.from_numpy(np.transpose(
input, (2, 0, 1))).unsqueeze(0).requires_grad_()
torch_weight = torch.from_numpy(np.transpose(
weight, (0, 3, 1, 2))).requires_grad_()
torch_bias = torch.from_numpy(bias).requires_grad_()
# forward
torch_output_tensor = torch.conv2d(torch_input, torch_weight, torch_bias,
stride, padding)
torch_output = np.transpose(
torch_output_tensor.detach().numpy().squeeze(0), (1, 2, 0))
cache = conv2d_forward(input, weight, bias, stride, padding)
numpy_output = cache['Z']
assert np.allclose(torch_output, numpy_output)
# backward
torch_sum = torch.sum(torch_output_tensor)
torch_sum.backward()
torch_dW = np.transpose(torch_weight.grad.numpy(), (0, 2, 3, 1))
torch_db = torch_bias.grad.numpy()
torch_dA_prev = np.transpose(torch_input.grad.numpy().squeeze(0),
(1, 2, 0))
dZ = np.ones(numpy_output.shape)
dW, db, dA_prev = conv2d_backward(dZ, cache, stride, padding)
assert np.allclose(dW, torch_dW)
assert np.allclose(db, torch_db)
assert np.allclose(dA_prev, torch_dA_prev)池化层:
import numpy as np
from module import Layers
class Pooling(Layers):
def __init__(self, name, ksize, stride, type):
super(Pooling).__init__(name)
self.type = type
self.ksize = ksize
self.stride = stride
def forward(self, x):
b, c, h, w = x.shape
out = np.zeros([b, c, h//self.stride, w//self.stride])
self.index = np.zeros_like(x)
for b in range(b):
for d in range(c):
for i in range(h//self.stride):
for j in range(w//self.stride):
_x = i *self.stride
_y = j *self.stride
if self.type =="max":
out[b, d, i, j] = np.max(x[b, d, _x:_x+self.ksize, _y:_y+self.ksize])
index = np.argmax(x[b, d, _x:_x+self.ksize, _y:_y+self.ksize])
self.index[b, d, _x +index//self.ksize, _y +index%self.ksize ] = 1
elif self.type == "aveg":
out[b, d, i, j] = np.mean((x[b, d, _x:_x+self.ksize, _y:_y+self.ksize]))
return out
def backward(self, grad_out):
if self.type =="max":
return np.repeat(np.repeat(grad_out, self.stride, axis=2),self.stride, axis=3)* self.index
elif self.type =="aveg":
return np.repeat(np.repeat(grad_out, self.stride, axis=2), self.stride, axis=3)/(self.ksize * self.ksize)













 957
957











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









