







准备:VS2019、Azure Kinect、SDKV1.4.1、OpenCV4.4.0、PCL1.12、VTK9.0
软件安装地址:
SDKV1.4.1下载地址:Azure-Kinect-Sensor-SDK/usage.md at develop · microsoft/Azure-Kinect-Sensor-SDK · GitHubOpenCV4.4.0下载地址:
Releases - OpenCV https://opencv.org/releases/
https://opencv.org/releases/
PCL1.12.0下载地址:
https://github.com/PointCloudLibrary/pcl/releases
项目配置:
VS2019配置OpenCV4.4.0
VS2019配置PCL1.12
VS2019配置Azure Kinect SDKV1.4.1
1、选择项目中的引用,右键选择管理NuGet包
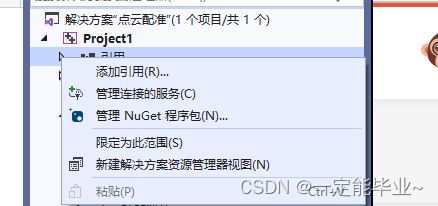
点击管理NuGet程序包(N)
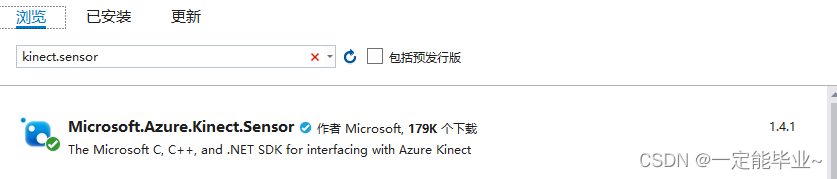
点击第一个进行下载
C++程序
1、获取Azure Kinect相机参数值
#include <iostream>
#include <fstream>
#include <string>
#include <iomanip>
#include <vector>
#include <k4a/k4a.h>
using namespace std;static string get_serial(k4a_device_t device)
{
size_t serial_number_length = 0;if (K4A_BUFFER_RESULT_TOO_SMALL != k4a_device_get_serialnum(device, NULL, &serial_number_length))
{
cout << "Failed to get serial number length" << endl;
k4a_device_close(device);
exit(-1);
}char* serial_number = new (std::nothrow) char[serial_number_length];
if (serial_number == NULL)
{
cout << "Failed to allocate memory for serial number (" << serial_number_length << " bytes)" << endl;
k4a_device_close(device);
exit(-1);
}if (K4A_BUFFER_RESULT_SUCCEEDED != k4a_device_get_serialnum(device, serial_number, &serial_number_length))
{
cout << "Failed to get serial number" << endl;
delete[] serial_number;
serial_number = NULL;
k4a_device_close(device);
exit(-1);
}string s(serial_number);
delete[] serial_number;
serial_number = NULL;
return s;
}static void print_calibration()
{
uint32_t device_count = k4a_device_get_installed_count();
cout << "Found " << device_count << " connected devices:" << endl;
cout << fixed << setprecision(6);for (uint8_t deviceIndex = 0; deviceIndex < device_count; deviceIndex++)
{
k4a_device_t device = NULL;
if (K4A_RESULT_SUCCEEDED != k4a_device_open(deviceIndex, &device))
{
cout << deviceIndex << ": Failed to open device" << endl;
exit(-1);
}k4a_calibration_t calibration;
k4a_device_configuration_t deviceConfig = K4A_DEVICE_CONFIG_INIT_DISABLE_ALL;
deviceConfig.color_format = K4A_IMAGE_FORMAT_COLOR_MJPG;
deviceConfig.color_resolution = K4A_COLOR_RESOLUTION_1080P;
deviceConfig.depth_mode = K4A_DEPTH_MODE_NFOV_UNBINNED;
deviceConfig.camera_fps = K4A_FRAMES_PER_SECOND_30;
deviceConfig.wired_sync_mode = K4A_WIRED_SYNC_MODE_STANDALONE;
deviceConfig.synchronized_images_only = true;// get calibration
if (K4A_RESULT_SUCCEEDED !=
k4a_device_get_calibration(device, deviceConfig.depth_mode, deviceConfig.color_resolution, &calibration))
{
cout << "Failed to get calibration" << endl;
exit(-1);
}auto calib = calibration.depth_camera_calibration;
cout << "\n===== Device " << (int)deviceIndex << ": " << get_serial(device) << " =====\n";
cout << "resolution width: " << calib.resolution_width << endl;
cout << "resolution height: " << calib.resolution_height << endl;
cout << "principal point x: " << calib.intrinsics.parameters.param.cx << endl;
cout << "principal point y: " << calib.intrinsics.parameters.param.cy << endl;
cout << "focal length x: " << calib.intrinsics.parameters.param.fx << endl;
cout << "focal length y: " << calib.intrinsics.parameters.param.fy << endl;
cout << "radial distortion coefficients:" << endl;
cout << "k1: " << calib.intrinsics.parameters.param.k1 << endl;
cout << "k2: " << calib.intrinsics.parameters.param.k2 << endl;
cout << "k3: " << calib.intrinsics.parameters.param.k3 << endl;
cout << "k4: " << calib.intrinsics.parameters.param.k4 << endl;
cout << "k5: " << calib.intrinsics.parameters.param.k5 << endl;
cout << "k6: " << calib.intrinsics.parameters.param.k6 << endl;
cout << "center of distortion in Z=1 plane, x: " << calib.intrinsics.parameters.param.codx << endl;
cout << "center of distortion in Z=1 plane, y: " << calib.intrinsics.parameters.param.cody << endl;
cout << "tangential distortion coefficient x: " << calib.intrinsics.parameters.param.p1 << endl;
cout << "tangential distortion coefficient y: " << calib.intrinsics.parameters.param.p2 << endl;
cout << "metric radius: " << calib.intrinsics.parameters.param.metric_radius << endl;k4a_device_close(device);
}
}static void calibration_blob(uint8_t deviceIndex = 0, string filename = "calibration.json")
{
k4a_device_t device = NULL;if (K4A_RESULT_SUCCEEDED != k4a_device_open(deviceIndex, &device))
{
cout << deviceIndex << ": Failed to open device" << endl;
exit(-1);
}size_t calibration_size = 0;
k4a_buffer_result_t buffer_result = k4a_device_get_raw_calibration(device, NULL, &calibration_size);
if (buffer_result == K4A_BUFFER_RESULT_TOO_SMALL)
{
vector<uint8_t> calibration_buffer = vector<uint8_t>(calibration_size);
buffer_result = k4a_device_get_raw_calibration(device, calibration_buffer.data(), &calibration_size);
if (buffer_result == K4A_BUFFER_RESULT_SUCCEEDED)
{
ofstream file(filename, ofstream::binary);
file.write(reinterpret_cast<const char*>(&calibration_buffer[0]), (long)calibration_size);
file.close();
cout << "Calibration blob for device " << (int)deviceIndex << " (serial no. " << get_serial(device)
<< ") is saved to " << filename << endl;
}
else
{
cout << "Failed to get calibration blob" << endl;
exit(-1);
}
}
else
{
cout << "Failed to get calibration blob size" << endl;
exit(-1);
}
}static void print_usage()
{
cout << "Usage: calibration_info [device_id] [output_file]" << endl;
cout << "Using calibration_info.exe without any command line arguments will display" << endl
<< "calibration info of all connected devices in stdout. If a device_id is given" << endl
<< "(0 for default device), the calibration.json file of that device will be" << endl
<< "saved to the current directory." << endl;
}int main(int argc, char** argv)
{
if (argc == 1)
{
print_calibration();
}
else if (argc == 2)
{
calibration_blob((uint8_t)atoi(argv[1]), "calibration.json");
}
else if (argc == 3)
{
calibration_blob((uint8_t)atoi(argv[1]), argv[2]);
}
else
{
print_usage();
}return 0;
}
2、获取RGB、IR、Depth、//深度图和RGB图配准获取白色点云,需要提前建立rgb、ir、depth三个子文件夹。
如果想要带RGB值,需要在static void generate_point_cloud(const k4a::image depth_image, const k4a_image_t xy_table, k4a_image_t point_cloud, int *point_count)里加入const k4a::image clour_image
//C++
#include <iostream>
#include <fstream>
#include <chrono>
#include <string>
//OpenCV
#include <opencv2/opencv.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
//Kinect DK
#include <k4a/k4a.hpp>
//#include <k4a/k4a.h>
#include <math.h>
#include <sstream>using namespace cv;
using namespace std;//宏
//方便控制是否 std::cout 信息
#define DEBUG_std_cout 0
static void create_xy_table(const k4a_calibration_t* calibration, k4a_image_t xy_table)
{
k4a_float2_t* table_data = (k4a_float2_t*)(void*)k4a_image_get_buffer(xy_table);int width = calibration->depth_camera_calibration.resolution_width;
int height = calibration->depth_camera_calibration.resolution_height;k4a_float2_t p;
k4a_float3_t ray;
int valid;for (int y = 0, idx = 0; y < height; y++)
{
p.xy.y = (float)y;
for (int x = 0; x < width; x++, idx++)
{
p.xy.x = (float)x;k4a_calibration_2d_to_3d(
calibration, &p, 1.f, K4A_CALIBRATION_TYPE_DEPTH, K4A_CALIBRATION_TYPE_DEPTH, &ray, &valid);if (valid)
{
table_data[idx].xy.x = ray.xyz.x;
table_data[idx].xy.y = ray.xyz.y;
}
else
{
table_data[idx].xy.x = nanf("");
table_data[idx].xy.y = nanf("");
}
}
}
}static void generate_point_cloud(const k4a::image depth_image, const k4a_image_t xy_table, k4a_image_t point_cloud, int* point_count)
{
int width = depth_image.get_width_pixels();
int height = depth_image.get_height_pixels();
uint16_t* depth_data = (uint16_t*)(void*)depth_image.get_buffer();
k4a_float2_t* xy_table_data = (k4a_float2_t*)(void*)k4a_image_get_buffer(xy_table);
k4a_float3_t* point_cloud_data = (k4a_float3_t*)(void*)k4a_image_get_buffer(point_cloud);*point_count = 0;
for (int i = 0; i < width * height; i++)
{
if (depth_data[i] != 0 && !isnan(xy_table_data[i].xy.x) && !isnan(xy_table_data[i].xy.y))
{
point_cloud_data[i].xyz.x = xy_table_data[i].xy.x * (float)depth_data[i];
point_cloud_data[i].xyz.y = xy_table_data[i].xy.y * (float)depth_data[i];
point_cloud_data[i].xyz.z = (float)depth_data[i];
(*point_count)++;
}
else
{
point_cloud_data[i].xyz.x = nanf("");
point_cloud_data[i].xyz.y = nanf("");
point_cloud_data[i].xyz.z = nanf("");
}
}
}static void write_point_cloud(const char* file_name, const k4a_image_t point_cloud, int point_count)
{
int width = k4a_image_get_width_pixels(point_cloud);
int height = k4a_image_get_height_pixels(point_cloud);k4a_float3_t* point_cloud_data = (k4a_float3_t*)(void*)k4a_image_get_buffer(point_cloud);
//save to the ply file
std::ofstream ofs(file_name); // text mode first
ofs << "ply" << std::endl;
ofs << "format ascii 1.0" << std::endl;
ofs << "element vertex"
<< " " << point_count << std::endl;
ofs << "property float x" << std::endl;
ofs << "property float y" << std::endl;
ofs << "property float z" << std::endl;
ofs << "end_header" << std::endl;
ofs.close();std::stringstream ss;
for (int i = 0; i < width * height; i++)
{
if (isnan(point_cloud_data[i].xyz.x) || isnan(point_cloud_data[i].xyz.y) || isnan(point_cloud_data[i].xyz.z))
{
continue;
}ss << (float)point_cloud_data[i].xyz.x << " " << (float)point_cloud_data[i].xyz.y << " "
<< (float)point_cloud_data[i].xyz.z << std::endl;
}std::ofstream ofs_text(file_name, std::ios::out | std::ios::app);
ofs_text.write(ss.str().c_str(), (std::streamsize)ss.str().length());
}int main(int argc, char* argv[]) {
/*找到并打开 Azure Kinect 设备
*/
//发现已连接的设备数const uint32_t device_count = k4a::device::get_installed_count();
if (0 == device_count) {
cout << "Error: no K4A devices found. " << endl;
return -1;
}
else {
std::cout << "Found " << device_count << " connected devices. " << std::endl;
if (1 != device_count)// 超过1个设备,也输出错误信息。
{
std::cout << "Error: more than one K4A devices found. " << std::endl;
return -1;
}
else// 该示例代码仅限对1个设备操作
{
std::cout << "Done: found 1 K4A device. " << std::endl;
}
}
//打开(默认)设备
k4a::device device = k4a::device::open(K4A_DEVICE_DEFAULT);
std::cout << "Done: open device. " << std::endl;/*
检索并保存 Azure Kinect 图像数据
*/
//配置并启动设备
k4a_device_configuration_t config = K4A_DEVICE_CONFIG_INIT_DISABLE_ALL;
config.camera_fps = K4A_FRAMES_PER_SECOND_30;
config.color_format = K4A_IMAGE_FORMAT_COLOR_BGRA32;
config.color_resolution = K4A_COLOR_RESOLUTION_1080P;
config.depth_mode = K4A_DEPTH_MODE_NFOV_UNBINNED;
//config.depth_mode = K4A_DEPTH_MODE_WFOV_2X2BINNED;
config.synchronized_images_only = true; // ensures that depth and color images are both available in the capture
device.start_cameras(&config);
std::cout << "Done: start camera." << std::endl;//写入txt文件流
ofstream rgb_out;
ofstream d_out;
ofstream ir_out;rgb_out.open("./rgb.txt");
d_out.open("./depth.txt");
ir_out.open("./ir.txt");rgb_out << "# color images" << endl;
rgb_out << "# file: rgbd_dataset" << endl;
rgb_out << "# timestamp" << " " << "filename" << endl;d_out << "# depth images" << endl;
d_out << "# file: rgbd_dataset" << endl;
d_out << "# timestamp" << " " << "filename" << endl;ir_out << "# ir images" << endl;
ir_out << "# file: rgbd_dataset" << endl;
ir_out << "# timestamp" << " " << "filename" << endl;rgb_out << flush;
d_out << flush;
//稳定化
k4a::capture capture;
int iAuto = 0;//用来稳定,类似自动曝光
int iAutoError = 0;// 统计自动曝光的失败次数
while (true) {
if (device.get_capture(&capture)) {
std::cout << iAuto << ". Capture several frames to give auto-exposure" << std::endl;//跳过前 n 个(成功的数据采集)循环,用来稳定
if (iAuto != 30) {
iAuto++;
continue;
}
else {
std::cout << "Done: auto-exposure" << std::endl;
break;// 跳出该循环,完成相机的稳定过程
}}
else {
std::cout << iAutoError << ". K4A_WAIT_RESULT_TIMEOUT." << std::endl;
if (iAutoError != 30) {
iAutoError++;
continue;
}
else {
std::cout << "Error: failed to give auto-exposure. " << std::endl;
return -1;
}
}
}
std::cout << "-----------------------------------" << std::endl;
std::cout << "----- Have Started Kinect DK. -----" << std::endl;
std::cout << "-----------------------------------" << std::endl;
//从设备获取捕获
k4a::image rgbImage;
k4a::image depthImage;
k4a::image irImage;
k4a::image transformed_depthImage;cv::Mat cv_rgbImage_with_alpha;
cv::Mat cv_rgbImage_no_alpha;
cv::Mat cv_depth;
cv::Mat cv_depth_8U;
cv::Mat cv_irImage;
cv::Mat cv_irImage_8U;while (true)
for (size_t i = 0; i < 100; i++)
{
if (device.get_capture(&capture, std::chrono::milliseconds(0)))
if (device.get_capture(&capture)) {
//rgb
//* Each pixel of BGRA32 data is four bytes.The first three bytes represent Blue, Green,
//*and Red data.The fourth byte is the alpha channel and is unused in the Azure Kinect APIs.
rgbImage = capture.get_color_image();
#if DEBUG_std_cout == 1
std::cout << "[rgb] " << "\n"
<< "format: " << rgbImage.get_format() << "\n"
<< "device_timestamp: " << rgbImage.get_device_timestamp().count() << "\n"
<< "system_timestamp: " << rgbImage.get_system_timestamp().count() << "\n"
<< "height*width: " << rgbImage.get_height_pixels() << ", " << rgbImage.get_width_pixels()
<< std::endl;
#endif//depth
//* Each pixel of DEPTH16 data is two bytes of little endian unsigned depth data.The unit of the data is in
//* millimeters from the origin of the camera.
depthImage = capture.get_depth_image();
#if DEBUG_std_cout == 1
std::cout << "[depth] " << "\n"
<< "format: " << depthImage.get_format() << "\n"
<< "device_timestamp: " << depthImage.get_device_timestamp().count() << "\n"
<< "system_timestamp: " << depthImage.get_system_timestamp().count() << "\n"
<< "height*width: " << depthImage.get_height_pixels() << ", " << depthImage.get_width_pixels()
<< std::endl;
#endif//ir
//* Each pixel of IR16 data is two bytes of little endian unsigned depth data.The value of the data represents
//* brightness.
irImage = capture.get_ir_image();
#if DEBUG_std_cout == 1
std::cout << "[ir] " << "\n"
<< "format: " << irImage.get_format() << "\n"
<< "device_timestamp: " << irImage.get_device_timestamp().count() << "\n"
<< "system_timestamp: " << irImage.get_system_timestamp().count() << "\n"
<< "height*width: " << irImage.get_height_pixels() << ", " << irImage.get_width_pixels()
<< std::endl;
#endif//深度图和RGB图配准
//Get the camera calibration for the entire K4A device, which is used for all transformation functions.
k4a::calibration k4aCalibration = device.get_calibration(config.depth_mode, config.color_resolution);k4a::transformation k4aTransformation = k4a::transformation(k4aCalibration);
transformed_depthImage = k4aTransformation.depth_image_to_color_camera(depthImage);
cv_rgbImage_with_alpha = cv::Mat(rgbImage.get_height_pixels(), rgbImage.get_width_pixels(), CV_8UC4,
(void*)rgbImage.get_buffer());
cv::cvtColor(cv_rgbImage_with_alpha, cv_rgbImage_no_alpha, cv::COLOR_BGRA2BGR);cv_depth = cv::Mat(transformed_depthImage.get_height_pixels(), transformed_depthImage.get_width_pixels(), CV_16U,
(void*)transformed_depthImage.get_buffer(), static_cast<size_t>(transformed_depthImage.get_stride_bytes()));normalize(cv_depth, cv_depth_8U, 0, 256 * 256, NORM_MINMAX);
cv_depth_8U.convertTo(cv_depth, CV_8U, 1);cv_irImage = cv::Mat(irImage.get_height_pixels(), irImage.get_width_pixels(), CV_16U,
(void*)irImage.get_buffer(), static_cast<size_t>(irImage.get_stride_bytes()));
normalize(cv_irImage, cv_irImage_8U, 0, 256 * 256, NORM_MINMAX);
cv_irImage.convertTo(cv_irImage_8U, CV_8U, 1);
//k4a::image xyzImage;
//cv::Mat cv_xyzImage;// 16位有符号
//cv::Mat cv_xyzImage_32F;// 32位float
//show image
//cv::imshow("color", cv_rgbImage_no_alpha);
//cv::imshow("depth", cv_depth_8U);
//cv::imshow("ir", cv_irImage_8U);//save image
double time_rgb = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
rgbImage.get_device_timestamp()).count());std::string filename_rgb = std::to_string(time_rgb / 1000000) + ".png";
double time_d = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
depthImage.get_device_timestamp()).count());std::string filename_d = std::to_string(time_d / 1000000) + ".png";
double time_ir = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
irImage.get_device_timestamp()).count());
std::string filename_ir = std::to_string(time_ir / 1000000) + ".png";
imwrite("./rgb/" + filename_rgb, cv_rgbImage_no_alpha);
imwrite("./depth/" + filename_d, cv_depth_8U);
imwrite("./ir/" + filename_ir, cv_irImage_8U);
//const int32_t TIMEOUT_IN_MS = 1000;
//std::string file_name;
//uint32_t device_count = 0;//k4a_device_t device1 = NULL;
//k4a_device_configuration_t config1 = K4A_DEVICE_CONFIG_INIT_DISABLE_ALL;
//k4a_capture_t capture1 = NULL;
//k4a_image_t depth_image = NULL;
//k4a_calibration_t calibration1;k4a_image_t xy_table = NULL;
k4a_image_t point_cloud = NULL;
int point_count = 0;double time_point = static_cast<double>(std::chrono::duration_cast<std::chrono::microseconds>(
rgbImage.get_device_timestamp()).count());
std::string filename_point = std::to_string(time_point / 1000000) + ".ply";
k4a_image_create(K4A_IMAGE_FORMAT_CUSTOM,
k4aCalibration.depth_camera_calibration.resolution_width,
k4aCalibration.depth_camera_calibration.resolution_height,
k4aCalibration.depth_camera_calibration.resolution_width * (int)sizeof(k4a_float2_t),
&xy_table);create_xy_table(&k4aCalibration, xy_table);
k4a_image_create(K4A_IMAGE_FORMAT_CUSTOM,
k4aCalibration.depth_camera_calibration.resolution_width,
k4aCalibration.depth_camera_calibration.resolution_height,
k4aCalibration.depth_camera_calibration.resolution_width * (int)sizeof(k4a_float3_t),
&point_cloud);
/* k4a_device_start_cameras(device, &config);
k4a_device_get_capture(device, &capture, TIMEOUT_IN_MS);*///depth_image = k4a_capture_get_depth_image(capture1);
if (depthImage == 0)
{
printf("Failed to get depth image from capture\n");
}generate_point_cloud(depthImage, xy_table, point_cloud, &point_count);
write_point_cloud(filename_point.c_str(), point_cloud, point_count);
/* k4a_image_release(depthImage);
k4a_capture_release(capture);*/
k4a_image_release(xy_table);
k4a_image_release(point_cloud);
//returnCode = 0;
//k4a_device_close(device1);
std::cout << "Acquiring!" << endl;//写入depth.txt, rgb.txt文件
rgb_out << std::to_string(time_rgb / 1000000) << " " << "rgb/" << filename_rgb << endl;
d_out << std::to_string(time_d / 1000000) << " " << "depth/" << filename_d << endl;
ir_out << std::to_string(time_ir / 1000000) << " " << "ir/" << filename_ir << endl;rgb_out << flush;
d_out << flush;
ir_out << flush;k4aTransformation.destroy();
cv_rgbImage_with_alpha.release();
cv_rgbImage_no_alpha.release();
cv_depth.release();
cv_depth_8U.release();
cv_irImage.release();
cv_irImage_8U.release();
capture.reset();if (cv::waitKey() == 'q')
{//按键采集,用户按下'q',跳出循环,结束采集
std::cout << "----------------------------------" << std::endl;
std::cout << "------------- closed -------------" << std::endl;
std::cout << "----------------------------------" << std::endl;
break;
}
}
else {
std::cout << "false: K4A_WAIT_RESULT_TIMEOUT." << std::endl;
}
}
cv::destroyAllWindows();
rgb_out << flush;
d_out << flush;
ir_out << flush;
rgb_out.close();
d_out.close();
ir_out.close();
// 释放,关闭设备
rgbImage.reset();
depthImage.reset();
irImage.reset();
capture.reset();
device.close();
return 1;
}
3、获取三维彩色点云
核心代码
k4a::calibration k4aCalibration = device.get_calibration(config.depth_mode, config.color_resolution);
k4a::transformation k4aTransformation = k4a::transformation(k4aCalibration);//PointCloud::Ptr cloud(new PointCloud);
int color_image_width_pixels = rgbImage.get_width_pixels();
int color_image_height_pixels = rgbImage.get_height_pixels();
transformed_depthImage = NULL;
transformed_depthImage = k4a::image::create(K4A_IMAGE_FORMAT_DEPTH16,
color_image_width_pixels,
color_image_height_pixels,
color_image_width_pixels * (int)sizeof(uint16_t));
k4a::image point_cloud_image = NULL;
point_cloud_image = k4a::image::create(K4A_IMAGE_FORMAT_CUSTOM,
color_image_width_pixels,
color_image_height_pixels,
color_image_width_pixels * 3 * (int)sizeof(int16_t));if (depthImage.get_width_pixels() == rgbImage.get_width_pixels() && depthImage.get_height_pixels() == rgbImage.get_height_pixels()) {
std::copy(depthImage.get_buffer(), depthImage.get_buffer() + depthImage.get_height_pixels() * depthImage.get_width_pixels() * (int)sizeof(uint16_t), transformed_depthImage.get_buffer());
}
else {
k4aTransformation.depth_image_to_color_camera(depthImage, &transformed_depthImage);
}
k4aTransformation.depth_image_to_point_cloud(transformed_depthImage, K4A_CALIBRATION_TYPE_COLOR, &point_cloud_image);pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGB>);
cloud->width = color_image_width_pixels;
cloud->height = color_image_height_pixels;
cloud->is_dense = false;
cloud->resize(static_cast<size_t>(color_image_width_pixels) * color_image_height_pixels);const int16_t* point_cloud_image_data = reinterpret_cast<const int16_t*>(point_cloud_image.get_buffer());
const uint8_t* color_image_data = rgbImage.get_buffer();for (int i = 0; i < color_image_width_pixels * color_image_height_pixels; i++) {
PointT point;point.x = point_cloud_image_data[3 * i + 0] / 1000.0f;
point.y = point_cloud_image_data[3 * i + 1] / 1000.0f;
point.z = point_cloud_image_data[3 * i + 2] / 1000.0f;point.b = color_image_data[4 * i + 0];
point.g = color_image_data[4 * i + 1];
point.r = color_image_data[4 * i + 2];
uint8_t alpha = color_image_data[4 * i + 3];
if (point.x == 0 && point.y == 0 && point.z == 0 && alpha == 0)
continue;
cloud->points[i] = point;
}
pcl::io::savePLYFile("D:\\data\\3.ply", *cloud); //将点云数据保存为ply文件
}
else {
std::cout << "false: K4A_WAIT_RESULT_TIMEOUT." << std::endl;
}
完整代码:
//C++
#include <iostream>
#include <fstream>
#include <iostream>
#include <chrono>
#include <string>
#include <io.h>
#include <vector>
#include <direct.h>
#include <math.h>
#include <sstream>
//OpenCV
#include <opencv2/opencv.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
//Kinect DK
#include <k4a/k4a.hpp>
//#include <k4a/k4a.h>
// PCL 库
#include <pcl/io/pcd_io.h>
#include <pcl/io/ply_io.h>
#include <pcl/point_types.h>//定义点云类型
typedef pcl::PointXYZRGB PointT;
typedef pcl::PointCloud<PointT> PointCloud;using namespace cv;
using namespace std;//宏
//方便控制是否 std::cout 信息
#define DEBUG_std_cout 0
int main(int argc, char* argv[]) {
/*
找到并打开 Azure Kinect 设备
*/
// 发现已连接的设备数const uint32_t device_count = k4a::device::get_installed_count();
if (0 == device_count) {
std::cout << "Error: no K4A devices found. " << std::endl;
return -1;
}
else {
std::cout << "Found " << device_count << " connected devices. " << std::endl;
if (1 != device_count)// 超过1个设备,也输出错误信息。
{
std::cout << "Error: more than one K4A devices found. " << std::endl;
return -1;
}
else// 该示例代码仅限对1个设备操作
{
std::cout << "Done: found 1 K4A device. " << std::endl;
}
}
// 打开(默认)设备
k4a::device device = k4a::device::open(K4A_DEVICE_DEFAULT);
std::cout << "Done: open device. " << std::endl;/*
检索并保存 Azure Kinect 图像数据
*/
// 配置并启动设备
k4a_device_configuration_t config = K4A_DEVICE_CONFIG_INIT_DISABLE_ALL;
config.camera_fps = K4A_FRAMES_PER_SECOND_30;
//config.camera_fps = K4A_FRAMES_PER_SECOND_15;
config.color_format = K4A_IMAGE_FORMAT_COLOR_BGRA32;
config.color_resolution = K4A_COLOR_RESOLUTION_720P;
config.depth_mode = K4A_DEPTH_MODE_NFOV_UNBINNED;
//config.depth_mode = K4A_DEPTH_MODE_WFOV_2X2BINNED;
config.synchronized_images_only = true;// ensures that depth and color images are both available in the capture
device.start_cameras(&config);
std::cout << "Done: start camera." << std::endl;//写入txt文件流
ofstream rgb_out;
ofstream d_out;rgb_out.open("./rgb.txt");
d_out.open("./depth.txt");rgb_out << "# color images" << endl;
rgb_out << "# file: rgbd_dataset" << endl;
rgb_out << "# timestamp" << " " << "filename" << endl;d_out << "# depth images" << endl;
d_out << "# file: rgbd_dataset" << endl;
d_out << "# timestamp" << " " << "filename" << endl;rgb_out << flush;
d_out << flush;
// 稳定化
k4a::capture capture;
int iAuto = 0;//用来稳定,类似自动曝光
int iAutoError = 0;// 统计自动曝光的失败次数
while (true) {
if (device.get_capture(&capture)) {
std::cout << iAuto << ". Capture several frames to give auto-exposure" << std::endl;// 跳过前 n 个(成功的数据采集)循环,用来稳定
if (iAuto != 30) {
iAuto++;
continue;
}
else {
std::cout << "Done: auto-exposure" << std::endl;
break;// 跳出该循环,完成相机的稳定过程
}}
else {
std::cout << iAutoError << ". K4A_WAIT_RESULT_TIMEOUT." << std::endl;
if (iAutoError != 30) {
iAutoError++;
continue;
}
else {
std::cout << "Error: failed to give auto-exposure. " << std::endl;
return -1;
}
}
}
std::cout << "-----------------------------------" << std::endl;
std::cout << "----- Have Started Kinect DK. -----" << std::endl;
std::cout << "-----------------------------------" << std::endl;
// 从设备获取捕获
k4a::image rgbImage;
k4a::image depthImage;
//k4a::image irImage;
k4a::image transformed_depthImage;cv::Mat cv_rgbImage_with_alpha;
cv::Mat cv_rgbImage_no_alpha;
cv::Mat cv_depth;
cv::Mat cv_depth_8U;int index = 0;
while (index < 1) {
if (device.get_capture(&capture)) {
// rgb
// * Each pixel of BGRA32 data is four bytes. The first three bytes represent Blue, Green,
// * and Red data. The fourth byte is the alpha channel and is unused in the Azure Kinect APIs.
rgbImage = capture.get_color_image();
#if DEBUG_std_cout == 1
std::cout << "[rgb] " << "\n"
<< "format: " << rgbImage.get_format() << "\n"
<< "device_timestamp: " << rgbImage.get_device_timestamp().count() << "\n"
<< "system_timestamp: " << rgbImage.get_system_timestamp().count() << "\n"
<< "height*width: " << rgbImage.get_height_pixels() << ", " << rgbImage.get_width_pixels()
<< std::endl;
#endif// depth
// * Each pixel of DEPTH16 data is two bytes of little endian unsigned depth data. The unit of the data is in
// * millimeters from the origin of the camera.
depthImage = capture.get_depth_image();
#if DEBUG_std_cout == 1
std::cout << "[depth] " << "\n"
<< "format: " << depthImage.get_format() << "\n"
<< "device_timestamp: " << depthImage.get_device_timestamp().count() << "\n"
<< "system_timestamp: " << depthImage.get_system_timestamp().count() << "\n"
<< "height*width: " << depthImage.get_height_pixels() << ", " << depthImage.get_width_pixels()
<< std::endl;
#endif
//获取彩色点云
k4a::calibration k4aCalibration = device.get_calibration(config.depth_mode, config.color_resolution);
k4a::transformation k4aTransformation = k4a::transformation(k4aCalibration);//PointCloud::Ptr cloud(new PointCloud);
int color_image_width_pixels = rgbImage.get_width_pixels();
int color_image_height_pixels = rgbImage.get_height_pixels();
transformed_depthImage = NULL;
transformed_depthImage = k4a::image::create(K4A_IMAGE_FORMAT_DEPTH16,
color_image_width_pixels,
color_image_height_pixels,
color_image_width_pixels * (int)sizeof(uint16_t));
k4a::image point_cloud_image = NULL;
point_cloud_image = k4a::image::create(K4A_IMAGE_FORMAT_CUSTOM,
color_image_width_pixels,
color_image_height_pixels,
color_image_width_pixels * 3 * (int)sizeof(int16_t));if (depthImage.get_width_pixels() == rgbImage.get_width_pixels() && depthImage.get_height_pixels() == rgbImage.get_height_pixels()) {
std::copy(depthImage.get_buffer(), depthImage.get_buffer() + depthImage.get_height_pixels() * depthImage.get_width_pixels() * (int)sizeof(uint16_t), transformed_depthImage.get_buffer());
}
else {
k4aTransformation.depth_image_to_color_camera(depthImage, &transformed_depthImage);
}
k4aTransformation.depth_image_to_point_cloud(transformed_depthImage, K4A_CALIBRATION_TYPE_COLOR, &point_cloud_image);pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGB>);
cloud->width = color_image_width_pixels;
cloud->height = color_image_height_pixels;
cloud->is_dense = false;
cloud->resize(static_cast<size_t>(color_image_width_pixels) * color_image_height_pixels);const int16_t* point_cloud_image_data = reinterpret_cast<const int16_t*>(point_cloud_image.get_buffer());
const uint8_t* color_image_data = rgbImage.get_buffer();for (int i = 0; i < color_image_width_pixels * color_image_height_pixels; i++) {
PointT point;point.x = point_cloud_image_data[3 * i + 0] / 1000.0f;
point.y = point_cloud_image_data[3 * i + 1] / 1000.0f;
point.z = point_cloud_image_data[3 * i + 2] / 1000.0f;point.b = color_image_data[4 * i + 0];
point.g = color_image_data[4 * i + 1];
point.r = color_image_data[4 * i + 2];
uint8_t alpha = color_image_data[4 * i + 3];
if (point.x == 0 && point.y == 0 && point.z == 0 && alpha == 0)
continue;
cloud->points[i] = point;
}
pcl::io::savePLYFile("D:\\data\\4.ply", *cloud); //将点云数据保存为ply文件
}
else {
std::cout << "false: K4A_WAIT_RESULT_TIMEOUT." << std::endl;
}
index++;
}
cv::destroyAllWindows();
rgb_out << flush;
d_out << flush;
rgb_out.close();
d_out.close();// 释放,关闭设备
rgbImage.reset();
depthImage.reset();
capture.reset();
device.close();return 1;
}
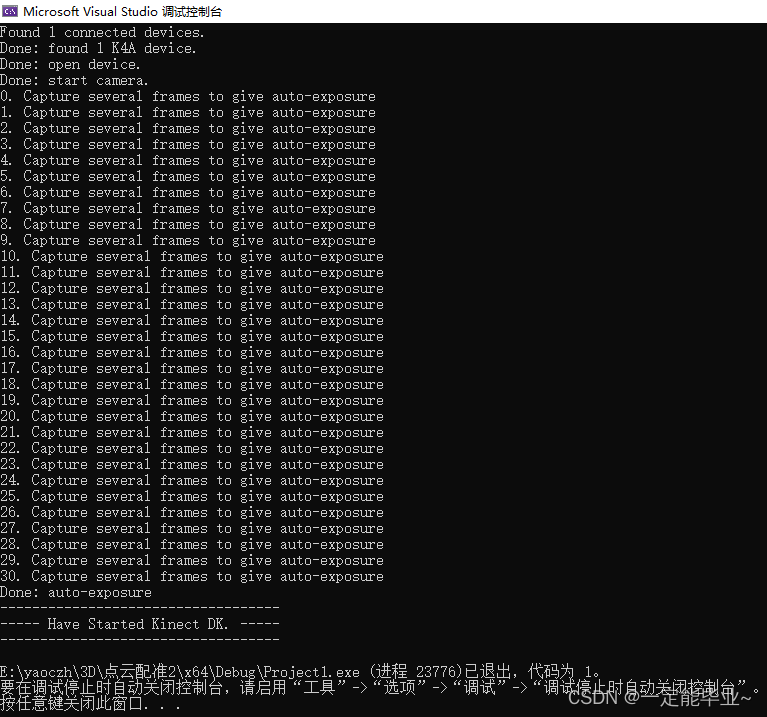
成功后界面
参考
(99条消息) 基于Azure Kinect SDK获取物体rgb图、深度图、红外IR图和点云数据并保存到本地_深度相机ir图_农机AI小白的博客-CSDN博客![]() https://blog.csdn.net/weixin_42532587/article/details/111054649?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522168446494016800192299929%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=168446494016800192299929&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-13-111054649-null-null.142%5Ev87%5Einsert_down28,239%5Ev2%5Einsert_chatgpt&utm_term=Azure%20Kinect%20DK%E8%8E%B7%E5%8F%96%E7%82%B9%E4%BA%91&spm=1018.2226.3001.4449(98条消息) 基于Azure Kinect DK相机的安装配置,获取并保存RGB、Depth、IR图、点云,点云融合(Windows)_yyyyygq的博客-CSDN博客
https://blog.csdn.net/weixin_42532587/article/details/111054649?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522168446494016800192299929%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=168446494016800192299929&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-13-111054649-null-null.142%5Ev87%5Einsert_down28,239%5Ev2%5Einsert_chatgpt&utm_term=Azure%20Kinect%20DK%E8%8E%B7%E5%8F%96%E7%82%B9%E4%BA%91&spm=1018.2226.3001.4449(98条消息) 基于Azure Kinect DK相机的安装配置,获取并保存RGB、Depth、IR图、点云,点云融合(Windows)_yyyyygq的博客-CSDN博客![]() https://blog.csdn.net/y18771025420/article/details/113468859?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522168422794616800225536534%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=168422794616800225536534&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduend~default-2-113468859-null-null.142%5Ev87%5Einsert_down28,239%5Ev2%5Einsert_chatgpt&utm_term=Azure%20Kinect%20DK%E7%94%9F%E6%88%90%E7%82%B9%E4%BA%91&spm=1018.2226.3001.4187(99条消息) Win10 系统下VisualStudio2019 配置点云库 PCL1.12.0_pcl1.12下载_点云侠的博客-CSDN博客
https://blog.csdn.net/y18771025420/article/details/113468859?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522168422794616800225536534%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=168422794616800225536534&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduend~default-2-113468859-null-null.142%5Ev87%5Einsert_down28,239%5Ev2%5Einsert_chatgpt&utm_term=Azure%20Kinect%20DK%E7%94%9F%E6%88%90%E7%82%B9%E4%BA%91&spm=1018.2226.3001.4187(99条消息) Win10 系统下VisualStudio2019 配置点云库 PCL1.12.0_pcl1.12下载_点云侠的博客-CSDN博客![]() https://blog.csdn.net/qq_36686437/article/details/119044299
https://blog.csdn.net/qq_36686437/article/details/119044299














 1063
1063











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









