




 本文介绍了红外遥控的基础知识及几种常见的红外协议,重点讲解了NEC协议的特点及其在MSP430单片机上的实现方法。包括硬件配置、定时器捕获中断的应用及红外信号的解析流程。
本文介绍了红外遥控的基础知识及几种常见的红外协议,重点讲解了NEC协议的特点及其在MSP430单片机上的实现方法。包括硬件配置、定时器捕获中断的应用及红外信号的解析流程。
文章目录
前言
在可视范围内,红外遥控是设备最廉价的遥控实现方式。该技术兼具应用实现原理简单、器件廉价的优势,成为我们日常设备控制的理想方式。目前几乎所有的视频和音频设备都可以通过这种方式遥控。
本文将简单介绍一些日常使用到的消费类电器红外控制协议,着重介绍NEC协议,并基于MSP430单片机的定时器捕获功能实现红外解码。
一、红外协议简介
1. ITT Protocol
ITT 红外协议不使用调制信号,直接发送是区别于其他协议的重要特点。
每个信号都是由 14 个 10us 时间间隔的脉冲信号组成来发送,解码则是根据脉冲的间隔进行。
该协议非常实用,并耗能很低,大大提高了电池寿命。
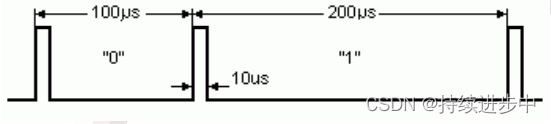
一个红外信号通过 14 个脉冲发送,每个脉冲都是 10us 长。
通常使用三个不同的时间间隔去区分一个信号:
100us 表示逻辑 0;
200us 表示逻辑 1;
300us 则表示起始条件脉冲(lead-in)和结束条件脉冲(lead-out);

2. NEC 协议
该协议由 NEC 开发,具有以下特征:
8 位地址码,8 位命令码;
完整发射两次地址码和命令码,以提高可靠性;
脉冲时间长短调制方式;
38KHz 载波频率;
位时间 1.12ms 或 2.25ms;
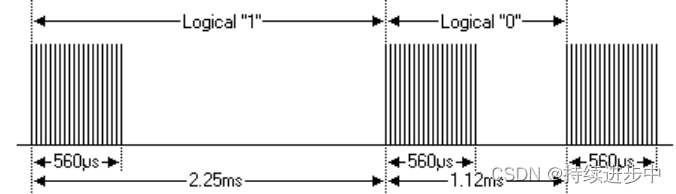
NEC 协议根据脉冲时间长短解码。每个脉冲为 560us 长的 38KHz 载波(约 21 个载波周期)。
逻辑”1”脉冲时间为 2.25ms;
逻辑”0”脉冲时间为 1.12ms。
推荐的载波周期为 1/4 或者 1/3,即 38K 载波信号的周期里,只有 1/4 或者 1/3是高电平。


注:发送端与接收端的信号电平正好发生翻转;
3. Nokia NRC17 协议
Nokia 协议使用 17 位比特发送红外指令;
8 位命令码,4 位地址码 4 子码;
38K 载波,双向解码;
位传送时间 1ms ;
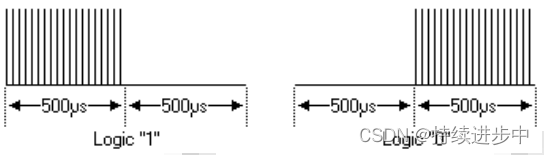
该协议采用所谓的不归零法解调 38K 载波,所有位的时间都相等且都为 1ms,每位都有一半的时间(500us)都是 38K 载波,剩下一半时间时空闲的低电平。逻辑 1 位表示为前面的一半时间为 38K 的载波,后面一半时间为低电平,反之逻辑 0 位刚好相反。
注:此外市场上也存在其他的协议,如夏普协议、索尼 SIRC 协议、飞利浦 RC-5 协议等。
二、红外解码程序(NEC协议)
1. 软硬件环境及红外解码状态图
芯片:MSP430FR57xx;
编译环境:Code Composer Studio;
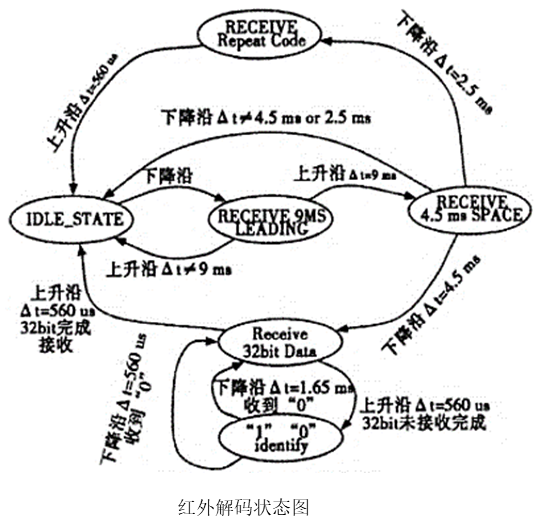
注:下面程序中新增加了一个用于检验传输地址、数据的状态:IRDA_RECEIVE_CHECKOUT;
2. 基于定时器捕获中断方式的NEC协议红外解码程序
代码如下:
#include <string.h>
#include "sysclock.h"
#include "gpio.h"
#include "timer.h"
#include "mcu_api.h"
#include "protocol.h"
// 红外解码状态机
//(空闲、下降沿9ms、上升沿4.5ms、接收数据、信号检验、0、1信号判断、重复发送——2.25秒)
#define IRDA_IDLE_STATE 0
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1391
1391

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









