






1、训练篇
开始run.py
from ultralytics import YOLO
# Load a model
#model = YOLO('yolov8n.yaml') # build a new model from YAML
#model = YOLO('yolov8n.pt') # load a pretrained model (recommended for training)
model = YOLO('yolov8n.yaml').load('yolov8n.pt') # build from YAML and transfer weights
# Train the model
model.train(data='D:/0000/YOLOv8/ultralytics-main/ultralytics/cfg/datasets/URPC2019.yaml', epochs=100 ,batch=2, resume=True, device=0, workers=0)
实例YOLO类,YOLO类继承于Model,先定义Model。
传入字符串yolov8n.yaml
1、初始化YOLO模型Model
def __init__(self, model: Union[str, Path] = 'yolov8n.pt', task=None) -> None:
"""
Initializes the YOLO model.
Args:
model (Union[str, Path], optional): Path or name of the model to load or create. Defaults to 'yolov8n.pt'.
task (Any, optional): Task type for the YOLO model. Defaults to None.
"""
super().__init__()
self.callbacks = callbacks.get_default_callbacks()
self.predictor = None # reuse predictor
self.model = None # model object
self.trainer = None # trainer object
self.ckpt = None # if loaded from *.pt
self.cfg = None # if loaded from *.yaml
self.ckpt_path = None
self.overrides = {} # overrides for trainer object
self.metrics = None # validation/training metrics
self.session = None # HUB session
self.task = task # task type
model = str(model).strip() # strip spaces
# Check if Ultralytics HUB model from https://hub.ultralytics.com
if self.is_hub_model(model): #Check if the provided model is a HUB model.model=yolov8n.yaml 不执行
from ultralytics.hub.session import HUBTrainingSession
self.session = HUBTrainingSession(model)
model = self.session.model_file
# Check if Triton Server model #也没有执行
elif self.is_triton_model(model):
self.model = model
self.task = task
return
# Load or create new YOLO model
model = checks.check_model_file_from_stem(model) # add suffix, i.e. yolov8n -> yolov8n.pt #如果.yaml后缀 就new一个 如果.pt结尾,就导入一个预训练模型
if Path(model).suffix in ('.yaml', '.yml'):
self._new(model, task)
else:
self._load(model, task)本次debug为.yaml 即new一个 task我没有传参数,所以还是为None。
执行self._new(model,task)。
def _new(self, cfg: str, task=None, model=None, verbose=True):
"""
Initializes a new model and infers the task type from the model definitions.
Args:
cfg (str): model configuration file
task (str | None): model task
model (BaseModel): Customized model.
verbose (bool): display model info on load
"""
cfg_dict = yaml_model_load(cfg)
self.cfg = cfg
self.task = task or guess_model_task(cfg_dict) #从模型字典中得到task,即yaml最后一层detect得到task为detect
self.model = (model or self._smart_load('model'))(cfg_dict, verbose=verbose and RANK == -1) # build model
self.overrides['model'] = self.cfg
self.overrides['task'] = self.task
# Below added to allow export from YAMLs
self.model.args = {**DEFAULT_CFG_DICT, **self.overrides} # combine default and model args (prefer model args)
self.model.task = self.task调用yaml_model_load(cfg)函数 cfg='yolov8n.yaml'
def yaml_model_load(path): #path:'yolov8.yaml'
"""Load a YOLOv8 model from a YAML file."""
import re
path = Path(path)
if path.stem in (f'yolov{d}{x}6' for x in 'nsmlx' for d in (5, 8)): #判断模型型号 本次debug不执行
new_stem = re.sub(r'(\d+)([nslmx])6(.+)?$', r'\1\2-p6\3', path.stem)
LOGGER.warning(f'WARNING ⚠️ Ultralytics YOLO P6 models now use -p6 suffix. Renaming {path.stem} to {new_stem}.')
path = path.with_name(new_stem + path.suffix)
unified_path = re.sub(r'(\d+)([nslmx])(.+)?$', r'\1\3', str(path)) # i.e. yolov8x.yaml -> yolov8.yaml
yaml_file = check_yaml(unified_path, hard=False) or check_yaml(path) #调用check_yaml(),里面又调用check_file() check_file()查找或者下载 files = glob.glob(str(ROOT / 'cfg' / '**' / file), recursive=True) # find file 查找路径 绝对路径 这时yaml_file 为绝对路径
d = yaml_load(yaml_file) # model dict #和yolov5一样的yaml导入
d['scale'] = guess_model_scale(path)
d['yaml_file'] = str(path)
return d此时cfg_dict: self._smart_load('model') 调用YOLO重写的task_map,返回一个DetectionModel类(为YOLOv8的检测模型)
self._smart_load('model') 调用YOLO重写的task_map,返回一个DetectionModel类(为YOLOv8的检测模型)
self.model=DetectionModel(cfg_dict, verbose=verbose and RANK == -1) 实例化类,初始化
class DetectionModel(BaseModel):
"""YOLOv8 detection model."""
def __init__(self, cfg='yolov8n.yaml', ch=3, nc=None, verbose=True): # model, input channels, number of classes
"""Initialize the YOLOv8 detection model with the given config and parameters."""
super().__init__()
self.yaml = cfg if isinstance(cfg, dict) else yaml_model_load(cfg) # cfg dict
# Define model
ch = self.yaml['ch'] = self.yaml.get('ch', ch) # input channels 3
if nc and nc != self.yaml['nc']:
LOGGER.info(f"Overriding model.yaml nc={self.yaml['nc']} with nc={nc}")
self.yaml['nc'] = nc # override YAML value
self.model, self.save = parse_model(deepcopy(self.yaml), ch=ch, verbose=verbose) # model, savelist 调用parse_model函数得到self.model和.save。代码基本和v5的一样
self.names = {i: f'{i}' for i in range(self.yaml['nc'])} # default names dict
self.inplace = self.yaml.get('inplace', True)
# Build strides
m = self.model[-1] # Detect()
if isinstance(m, (Detect, Segment, Pose)):
s = 256 # 2x min stride
m.inplace = self.inplace
forward = lambda x: self.forward(x)[0] if isinstance(m, (Segment, Pose)) else self.forward(x)
m.stride = torch.tensor([s / x.shape[-2] for x in forward(torch.zeros(1, ch, s, s))]) # forward
self.stride = m.stride
m.bias_init() # only run once
else:
self.stride = torch.Tensor([32]) # default stride for i.e. RTDETR
# Init weights, biases
initialize_weights(self)
if verbose:
self.info()
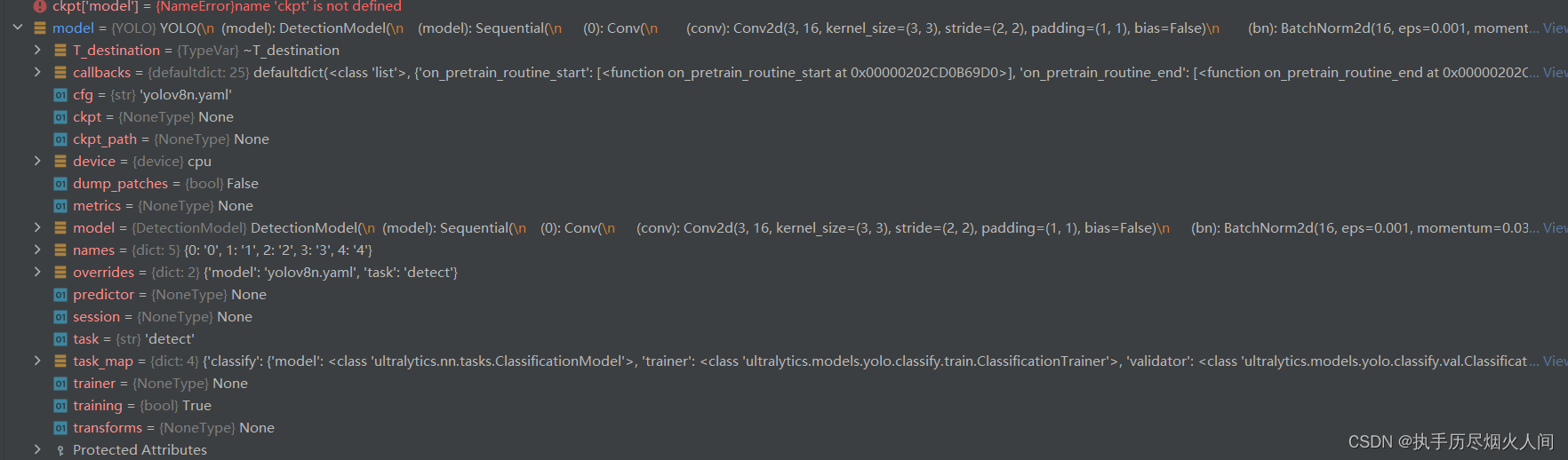
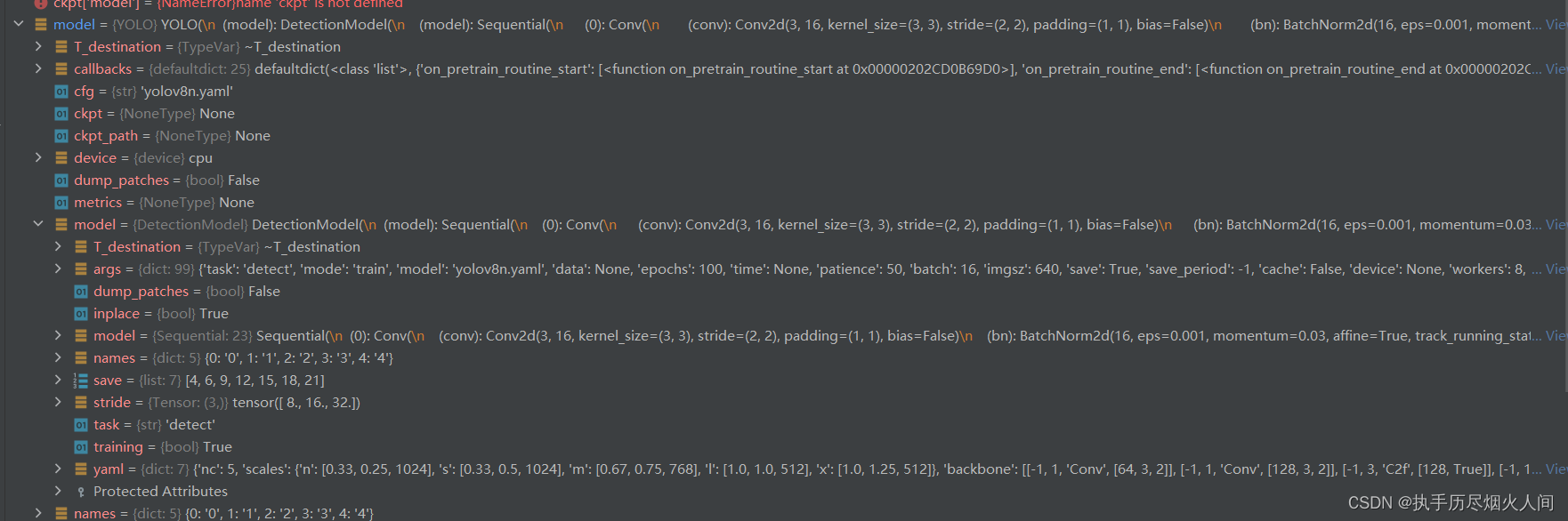
LOGGER.info('')已经完成了第一步
model = YOLO('yolov8n.yaml') 此时model:
 2、下一步导入预训练权重:
2、下一步导入预训练权重:
def load(self, weights='yolov8n.pt'):
"""Transfers parameters with matching names and shapes from 'weights' to model."""
self._check_is_pytorch_model()
if isinstance(weights, (str, Path)):
weights, self.ckpt = attempt_load_one_weight(weights)
self.model.load(weights)
return selfmodel.train()
def train(self, trainer=None, **kwargs):
"""
Trains the model on a given dataset.
Args:
trainer (BaseTrainer, optional): Customized trainer.
**kwargs (Any): Any number of arguments representing the training configuration.
"""
self._check_is_pytorch_model()
if hasattr(self.session, "model") and self.session.model.id: # Ultralytics HUB session with loaded model
if any(kwargs):
LOGGER.warning("WARNING ⚠️ using HUB training arguments, ignoring local training arguments.")
kwargs = self.session.train_args # overwrite kwargs
checks.check_pip_update_available()
overrides = yaml_load(checks.check_yaml(kwargs["cfg"])) if kwargs.get("cfg") else self.overrides
custom = {"data": DEFAULT_CFG_DICT["data"] or TASK2DATA[self.task]} # method defaults
args = {**overrides, **custom, **kwargs, "mode": "train"} # highest priority args on the right
if args.get("resume"):
args["resume"] = self.ckpt_path
self.trainer = (trainer or self._smart_load("trainer"))(overrides=args, _callbacks=self.callbacks)
if not args.get("resume"): # manually set model only if not resuming
self.trainer.model = self.trainer.get_model(weights=self.model if self.ckpt else None, cfg=self.model.yaml)
self.model = self.trainer.model
if SETTINGS["hub"] is True and not self.session:
# Create a model in HUB
try:
self.session = self._get_hub_session(self.model_name)
if self.session:
self.session.create_model(args)
# Check model was created
if not getattr(self.session.model, "id", None):
self.session = None
except (PermissionError, ModuleNotFoundError):
# Ignore PermissionError and ModuleNotFoundError which indicates hub-sdk not installed
pass
self.trainer.hub_session = self.session # attach optional HUB session
self.trainer.train()
# Update model and cfg after training
if RANK in (-1, 0):
ckpt = self.trainer.best if self.trainer.best.exists() else self.trainer.last
self.model, _ = attempt_load_one_weight(ckpt)
self.overrides = self.model.args
self.metrics = getattr(self.trainer.validator, "metrics", None) # TODO: no metrics returned by DDP
return self.metrics未完待续。。。















 5万+
5万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









