






一、PID控制算法
PID控制律:
误差:
任务场景:小车转向角从0到30
import numpy as np
import matplotlib.pyplot as plt
# ---------------- PID 控制器 ----------------
class PositionPID:
def __init__(self, Kp, Ki, Kd, setpoint=0):
self.Kp = Kp
self.Ki = Ki
self.Kd = Kd
self.setpoint = setpoint
self.integral = 0 # 积分累计值
self.prev_error = 0 # 上一次误差
def update(self, measurement, dt):
error = self.setpoint - measurement
self.integral += error * dt
# 微分 =(当前误差 - 上次误差)/ 时间间隔
derivative = (error - self.prev_error) / dt if dt > 0 else 0
self.prev_error = error
return (
self.Kp * error +
self.Ki * self.integral +
self.Kd * derivative
)
# ---------------- 小车转向角模拟(应用场景) ----------------
dt = 0.02 # 控制周期
time = np.arange(0, 5, dt) # 模拟 5 秒
target_angle = 30 # 目标转向角度(度)
pid = PositionPID(Kp=8.0, Ki=0.01, Kd=0.01, setpoint=target_angle)
angle = 0 # 初始方向角
angles = []
outputs = []
for t in time:
u = pid.update(angle, dt) # PID 输出
angle += u * 0.015 # 小车转向响应模型(简化)
angles.append(angle)
outputs.append(u)
# -------------------- 画图 --------------------
plt.figure(figsize=(9, 5))
plt.plot(time, angles, label="Steering Angle", linewidth=2)
plt.axhline(target_angle, color='r', linestyle='--', label="Target Angle")
plt.title("PID Steering Angle Control Simulation", fontsize=14)
plt.xlabel("Time (s)")
plt.ylabel("Steering Angle (deg)")
plt.grid(True)
plt.legend()
plt.tight_layout()
plt.show()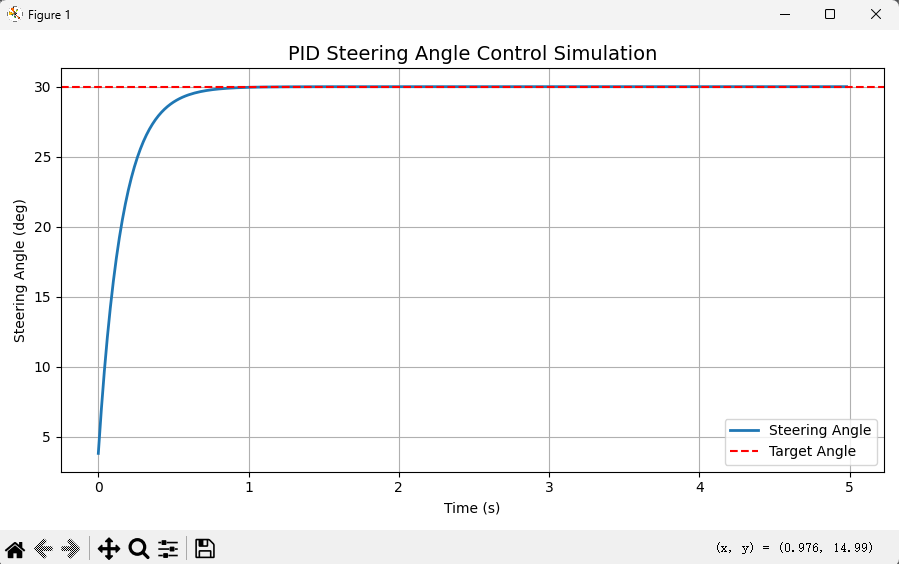
二、LQR(Linear Quadratic Regulator):线性二次型最优状态反馈
对于二维离散线性系统,系统形式如下:
选择一个简单系统(位置-速度二阶系统):
系统模型建立:
import numpy as np
import matplotlib.pyplot as plt
A = np.array([[1, 0.1],
[0, 1 ]])
B = np.array([[0],
[0.1]])
def plant_update(x, u):
return A @ x + B * u
LQR算法实现:
代价函数权重自定义:
# ===================
# 选择代价函数权重
# ===================
Q = np.diag([10, 1]) # 惩罚位置误差 > 速度误差
R = np.array([[1]]) # 惩罚控制输入
迭代法求解方程
得到K
# ===================
# 求解离散 Riccati 方程
# ===================
P = Q.copy()
for _ in range(200):
P = Q + A.T @ P @ A - A.T @ P @ B @ np.linalg.inv(R + B.T @ P @ B) @ B.T @ P @ A
# 最优反馈增益
K = np.linalg.inv(R + B.T @ P @ B) @ B.T @ P @ A
K = K.reshape(1, 2)
print("LQR Feedback Gain K =", K)
# ===================
# LQR 跟踪控制律:u = -K(x - x_ref)
# ===================
def lqr_control(x, r):
x_ref = np.array([[r], [0]]) # 参考位置 = r,速度=0
return (-K @ (x - x_ref))[0, 0]
# ===================
# 仿真
# ===================
steps = 50
r = 1.0 # 目标位置
x = np.array([[0.0], [0.0]])
history = []
def plant_update(x, u):
return A @ x + B * u
for _ in range(steps):
u = lqr_control(x, r)
x = plant_update(x, u)
history.append(x[0,0])
# ===================
# 绘图
# ===================
plt.plot(history, label="LQR")
plt.axhline(r, linestyle="--", color="gray", label="Reference r=1")
plt.title("LQR Tracking Control on 2D System")
plt.xlabel("Step")
plt.ylabel("x1 (Position)")
plt.grid(True)
plt.legend()
plt.show()
三、模型预测控制(MPC)
参考:https://blog.csdn.net/qq_44940689/article/details/139808413

















 1598
1598

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









