






 本文介绍了上学期学习的SmallRobotArm项目,一个基于步进电机的六轴机械臂,使用ArduinoMega2560作为主控板。作者主要分析了项目中的关键函数,尤其是运动学部分,并强调经过Matlab验证的高精度。读者可参与讨论和学习机械臂技术。
本文介绍了上学期学习的SmallRobotArm项目,一个基于步进电机的六轴机械臂,使用ArduinoMega2560作为主控板。作者主要分析了项目中的关键函数,尤其是运动学部分,并强调经过Matlab验证的高精度。读者可参与讨论和学习机械臂技术。
项目简介
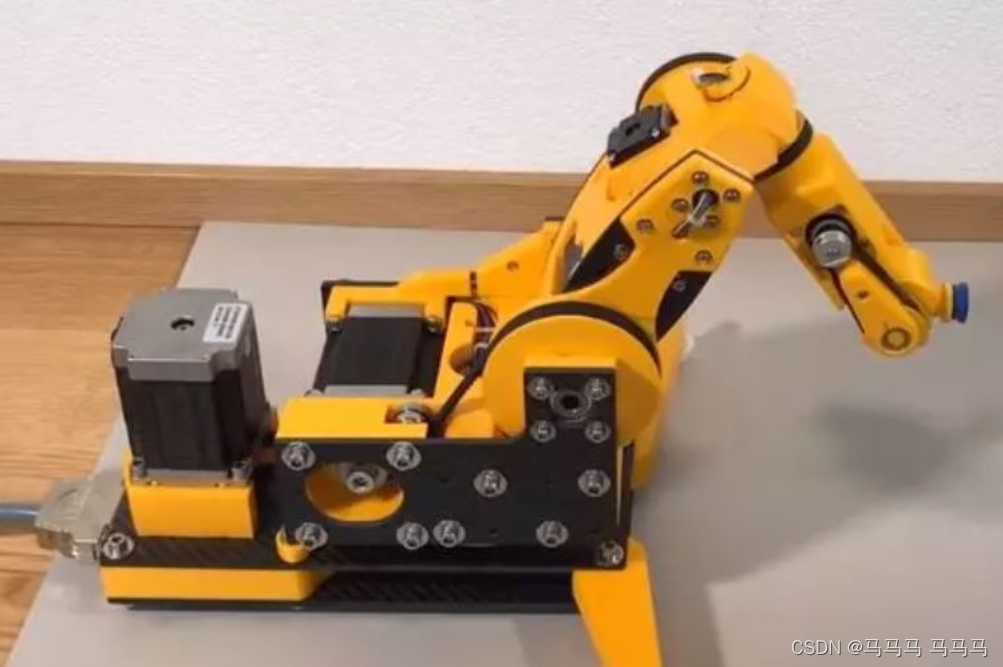
上学期学习机械臂时接触到一个开源项目Small Robot Arm,这是一个关于六轴机械臂的项目,六个关节采用步进电机进行驱动,主控板为Arduino Mega2560,代码只进行了运动学分析。
也可以从太极创客网站寻找资源,文件的分类比较清晰。
参考文章:
开源机器人SmallRobotArm机器人源码解读_人形机器人的开源代码-CSDN博客
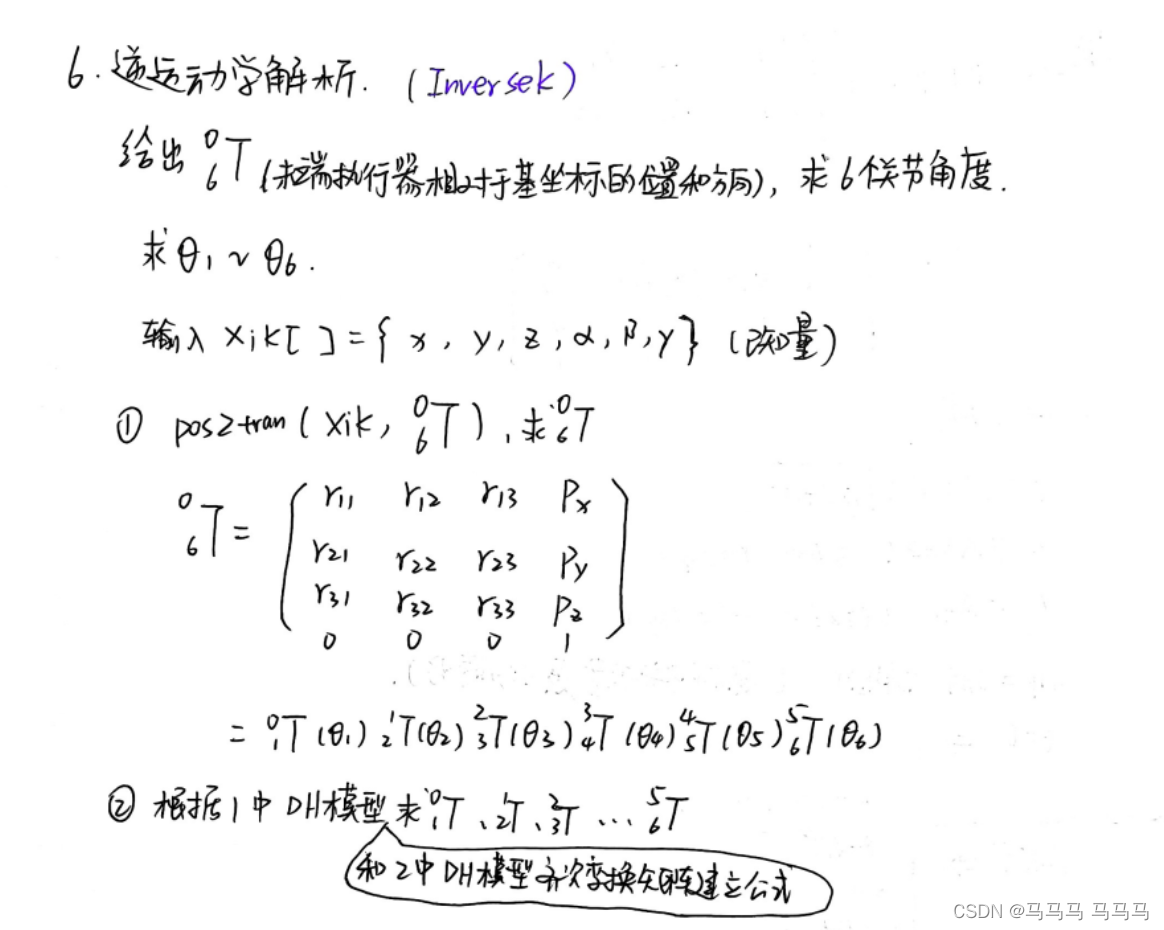
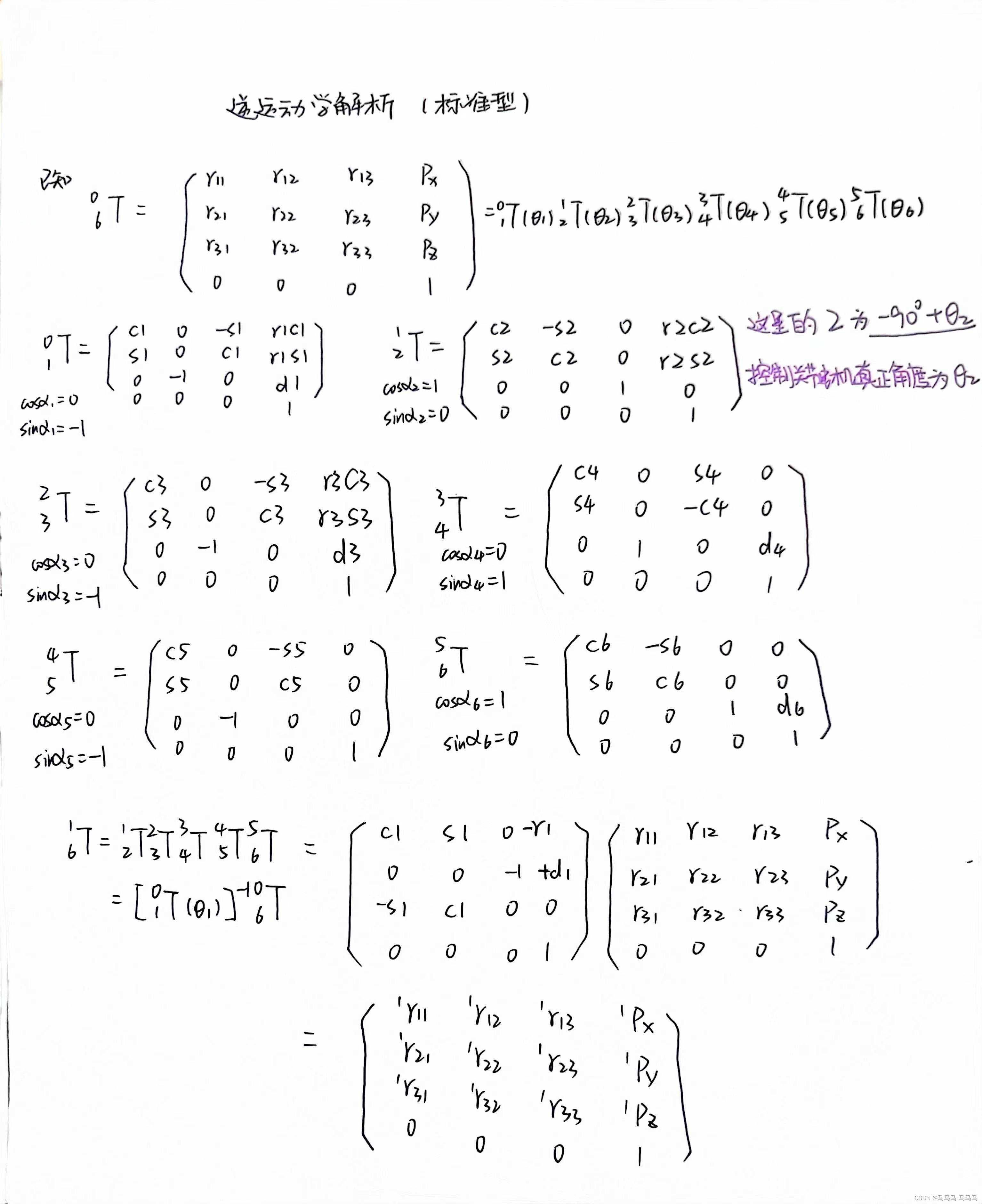
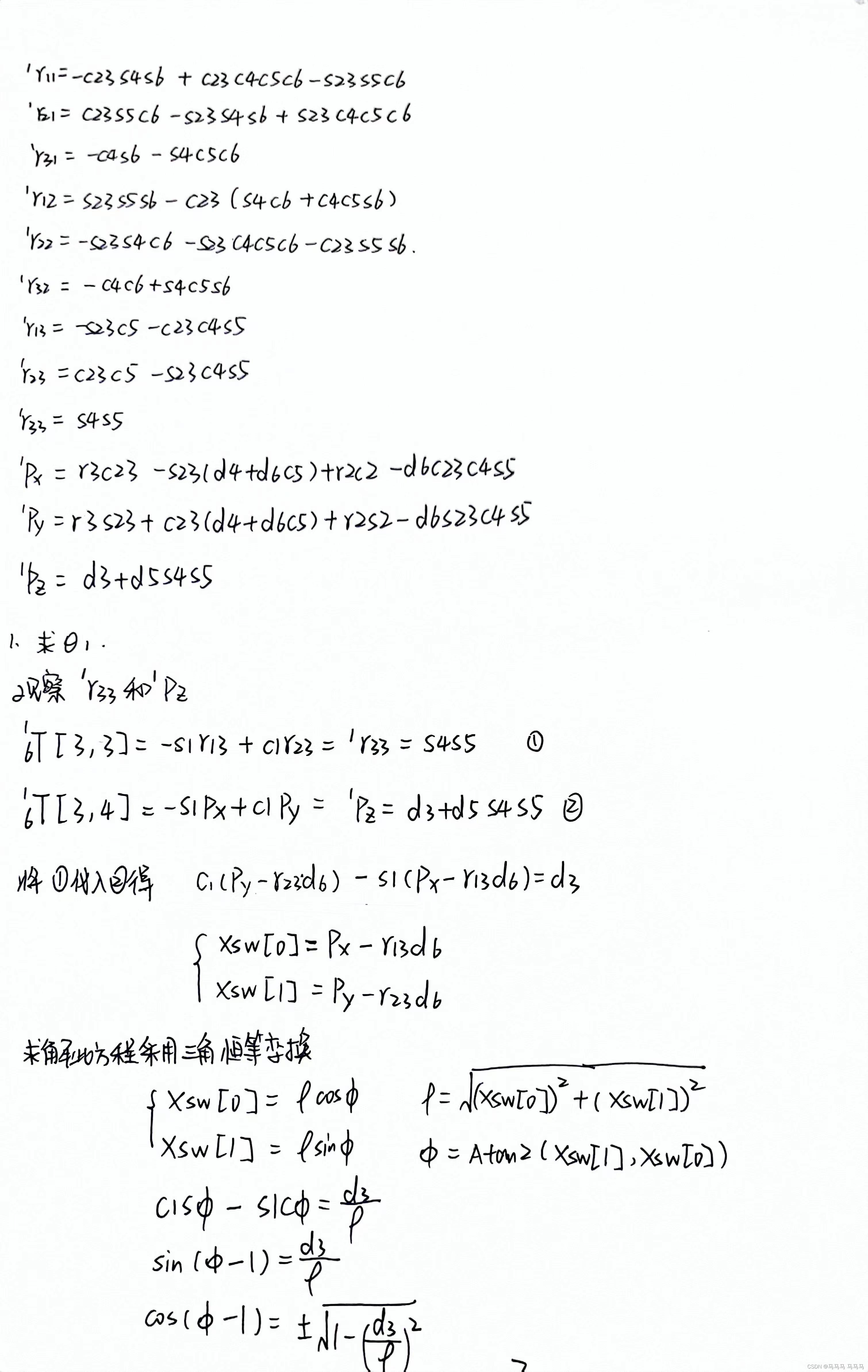
代码分析
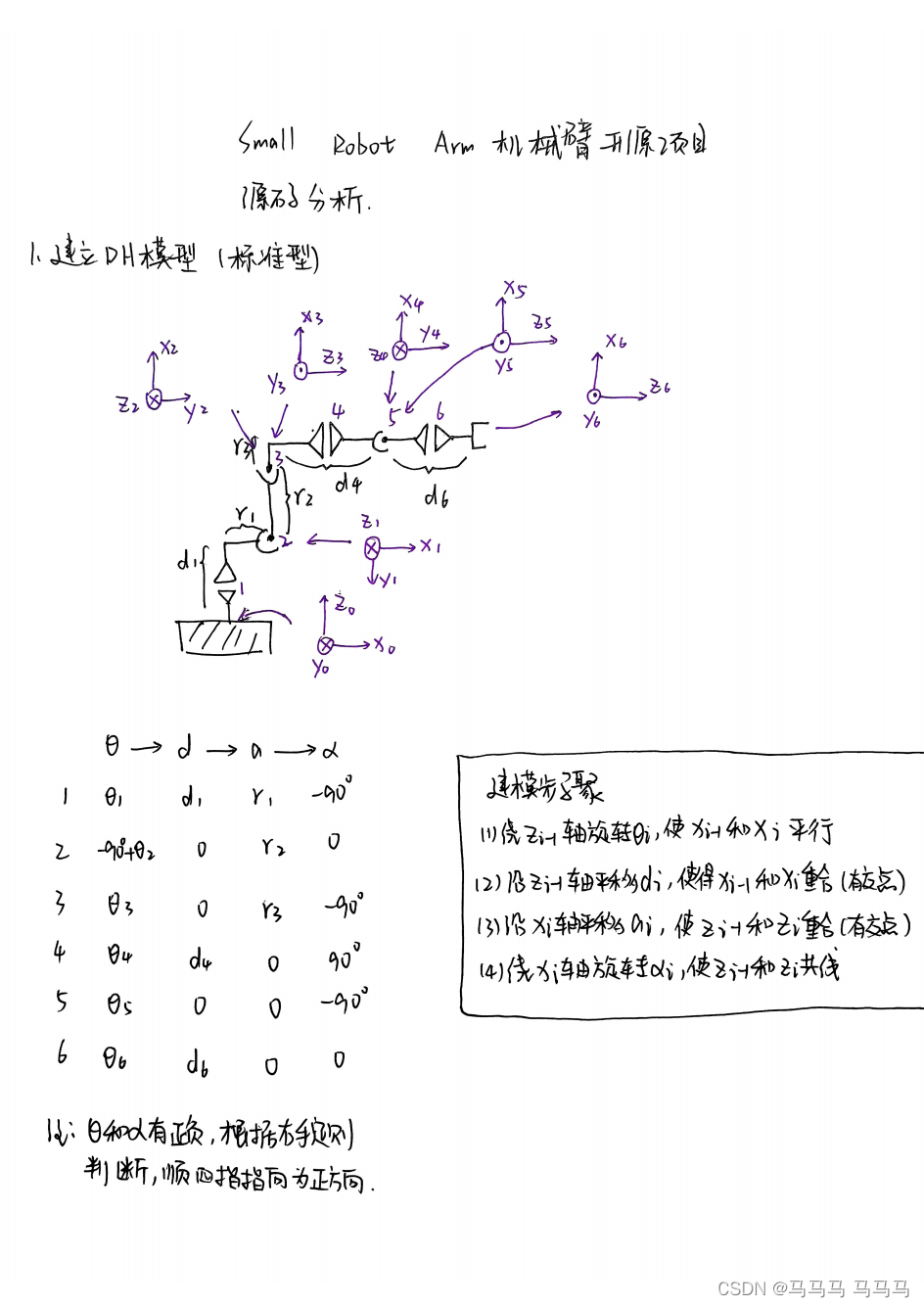
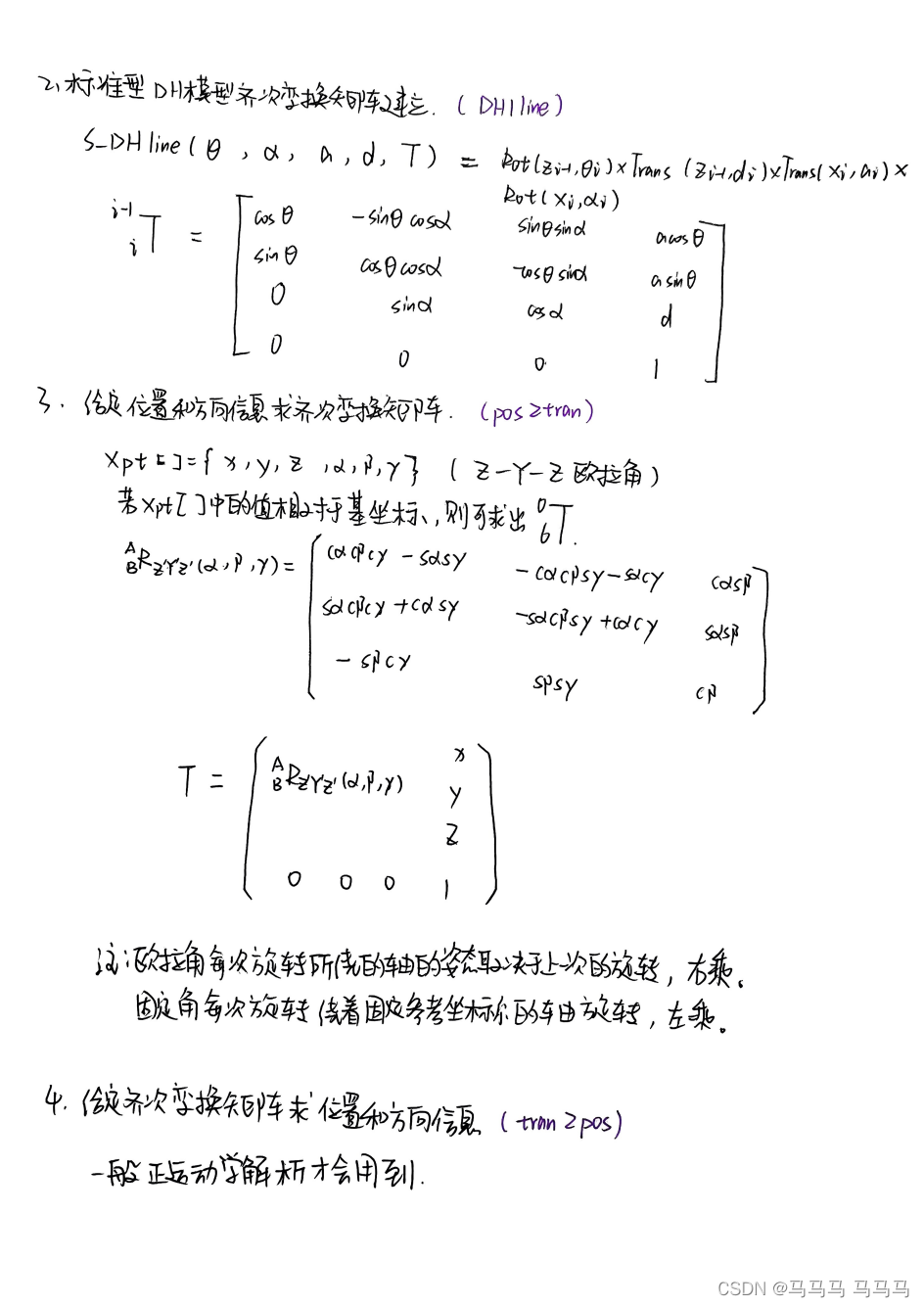
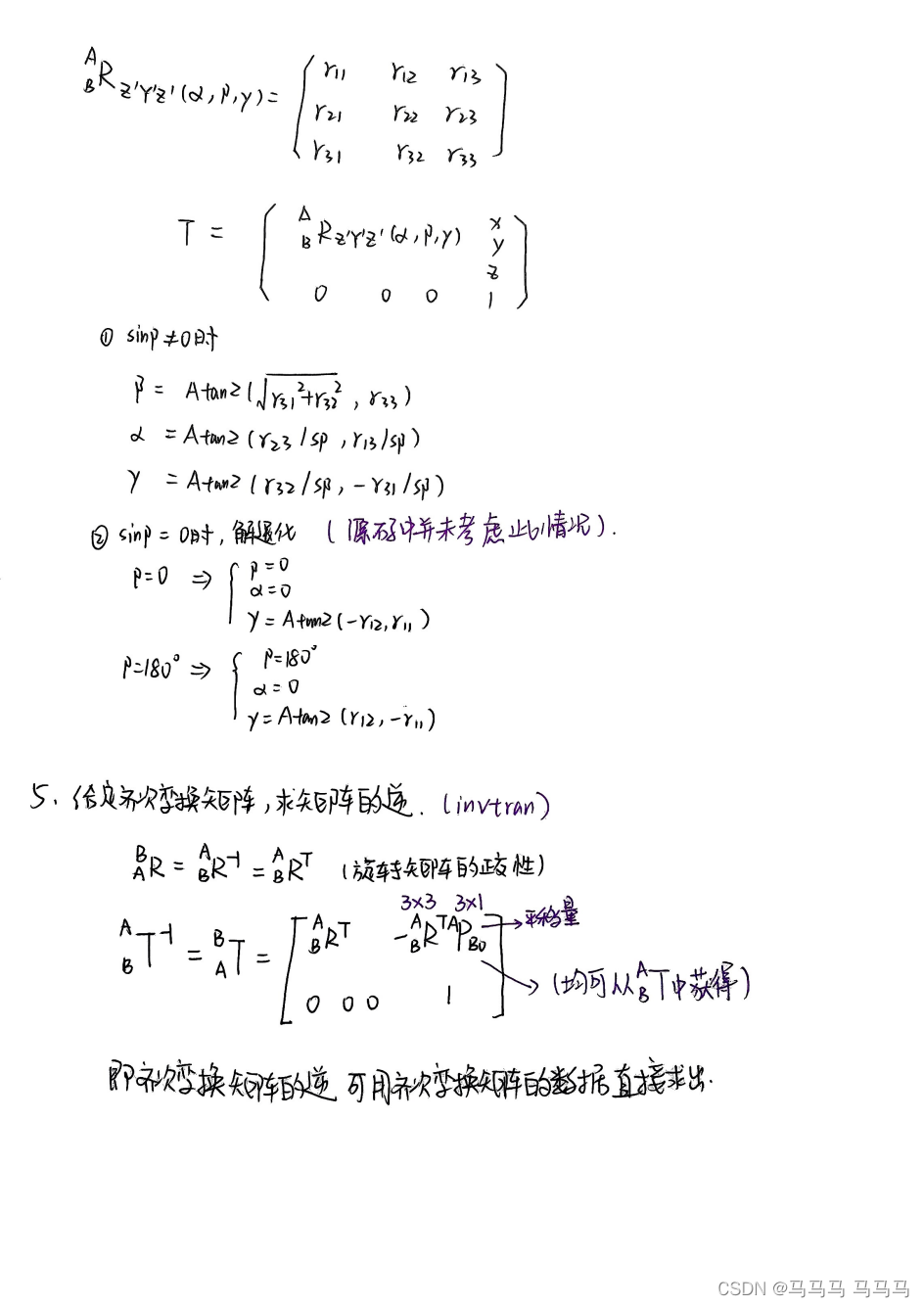
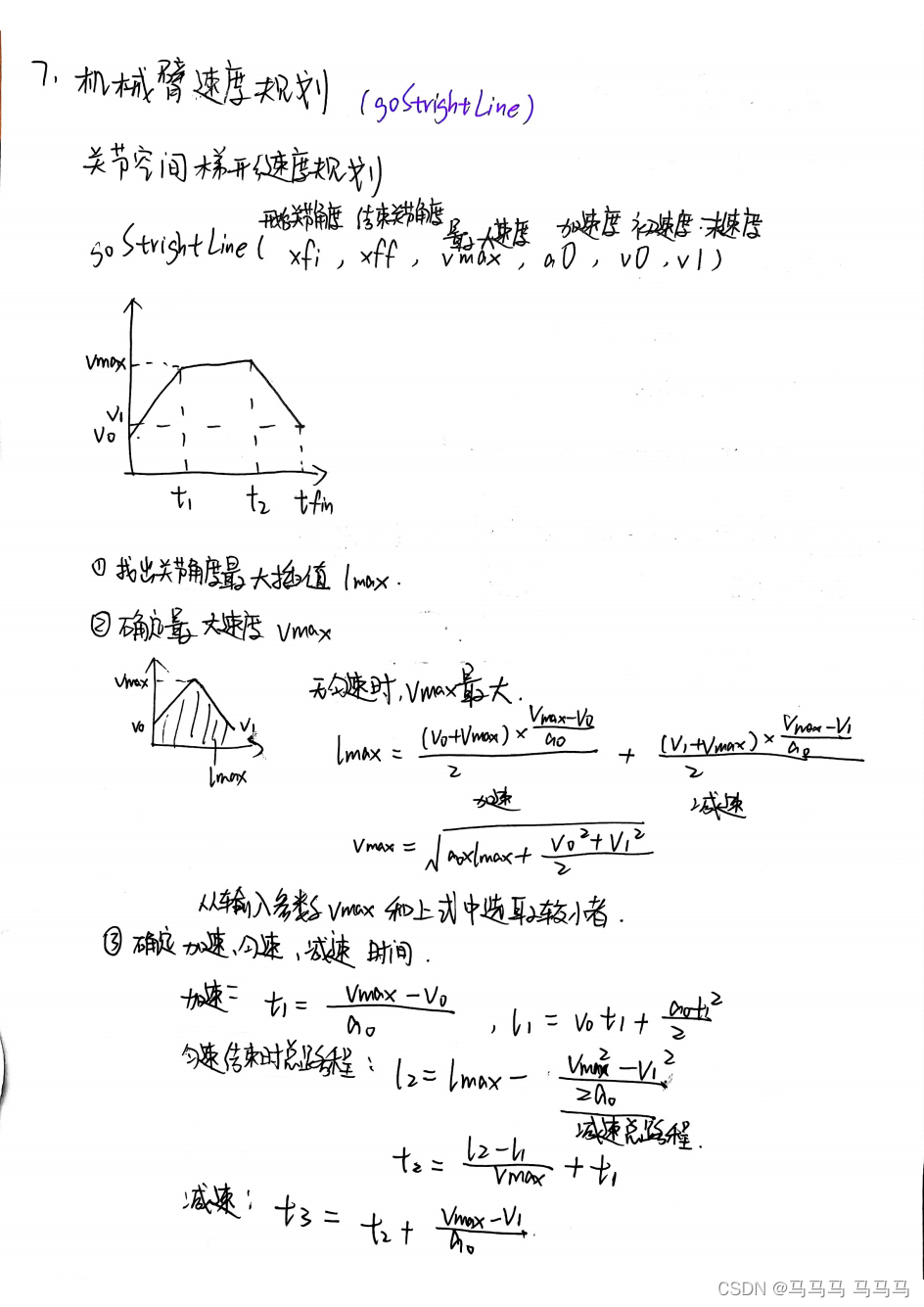
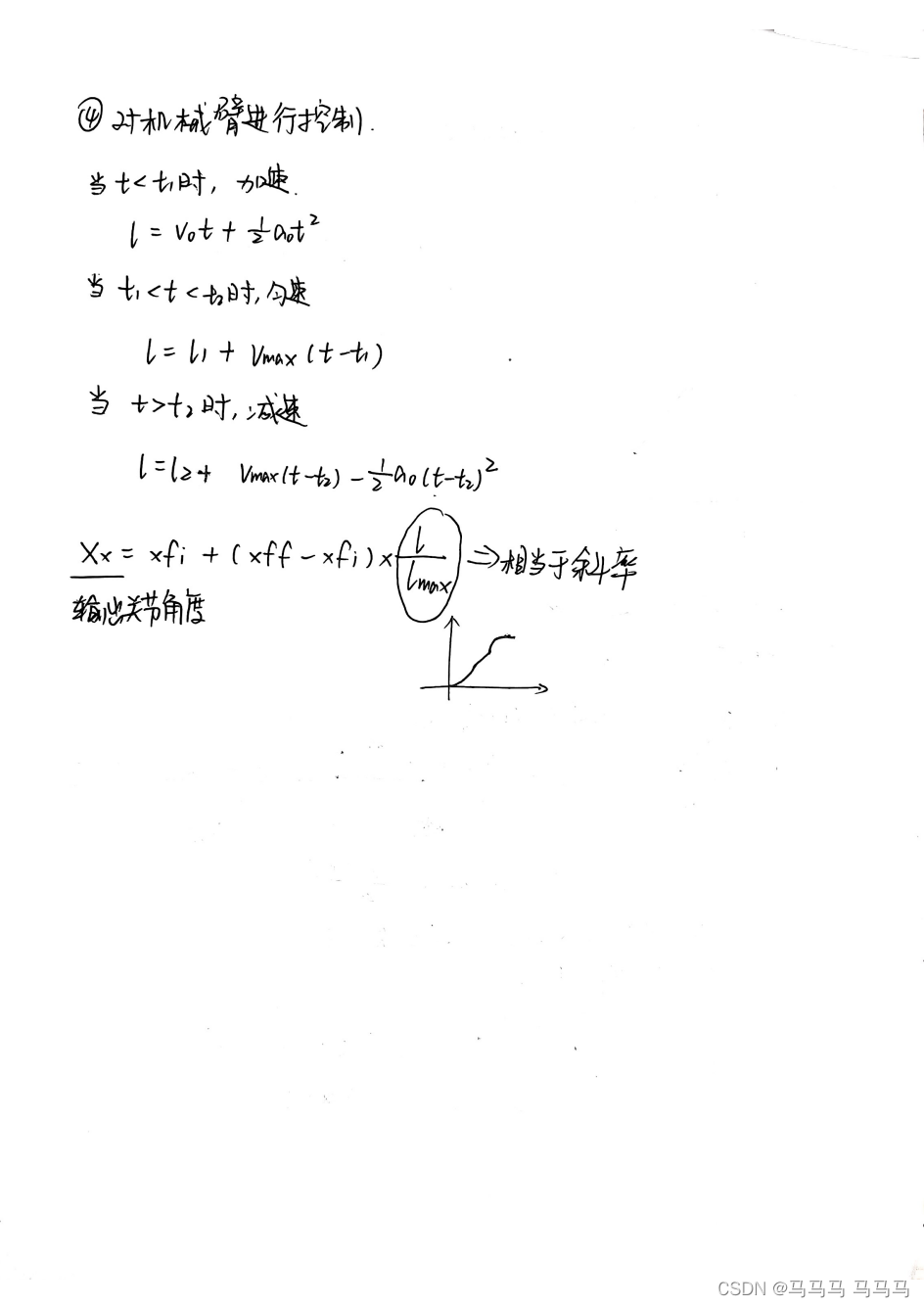
笔记只对项目中主要的函数进行了分析,这里没有手写正运动学分析的代码,这部分是比较简单的。
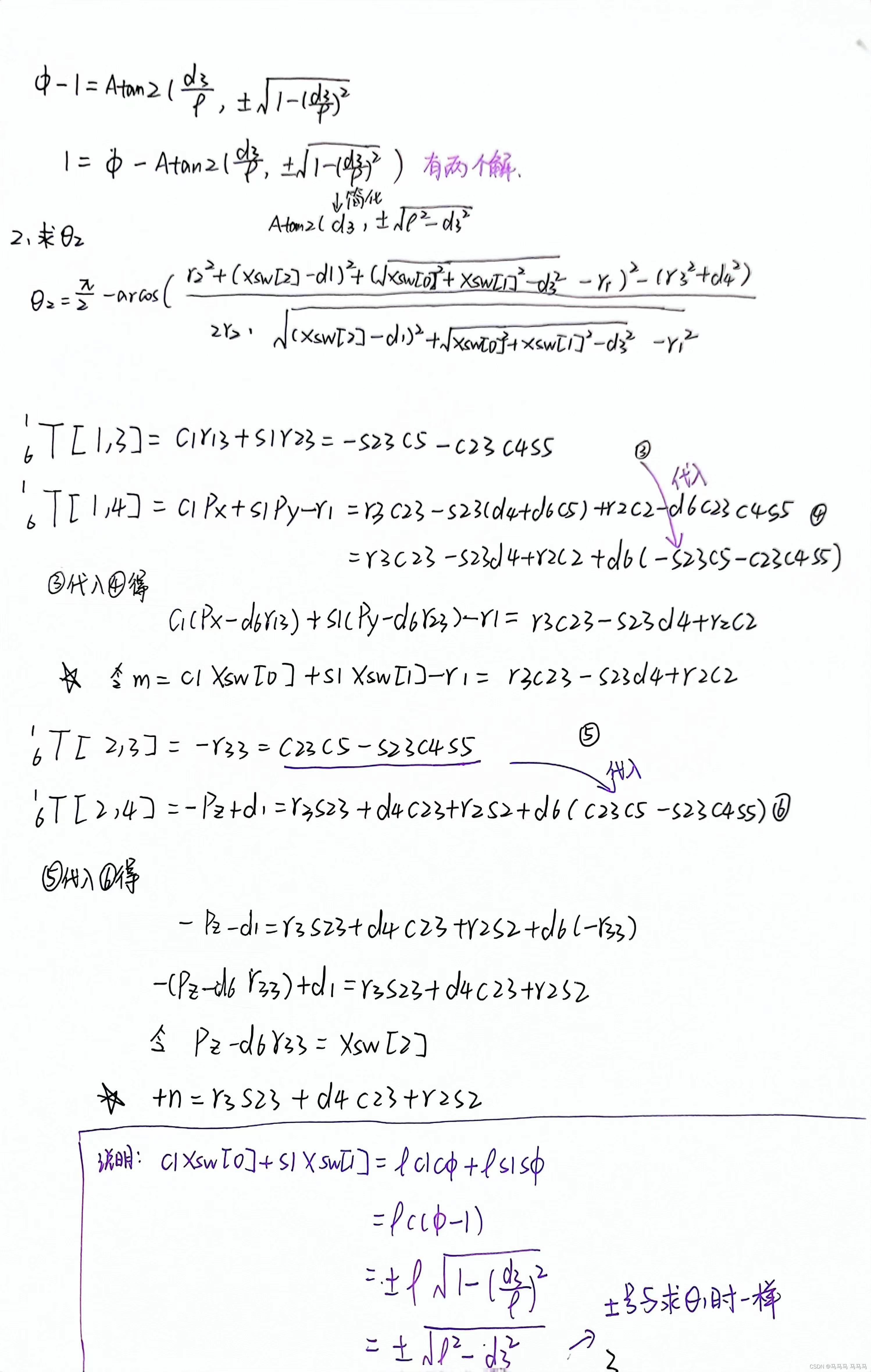

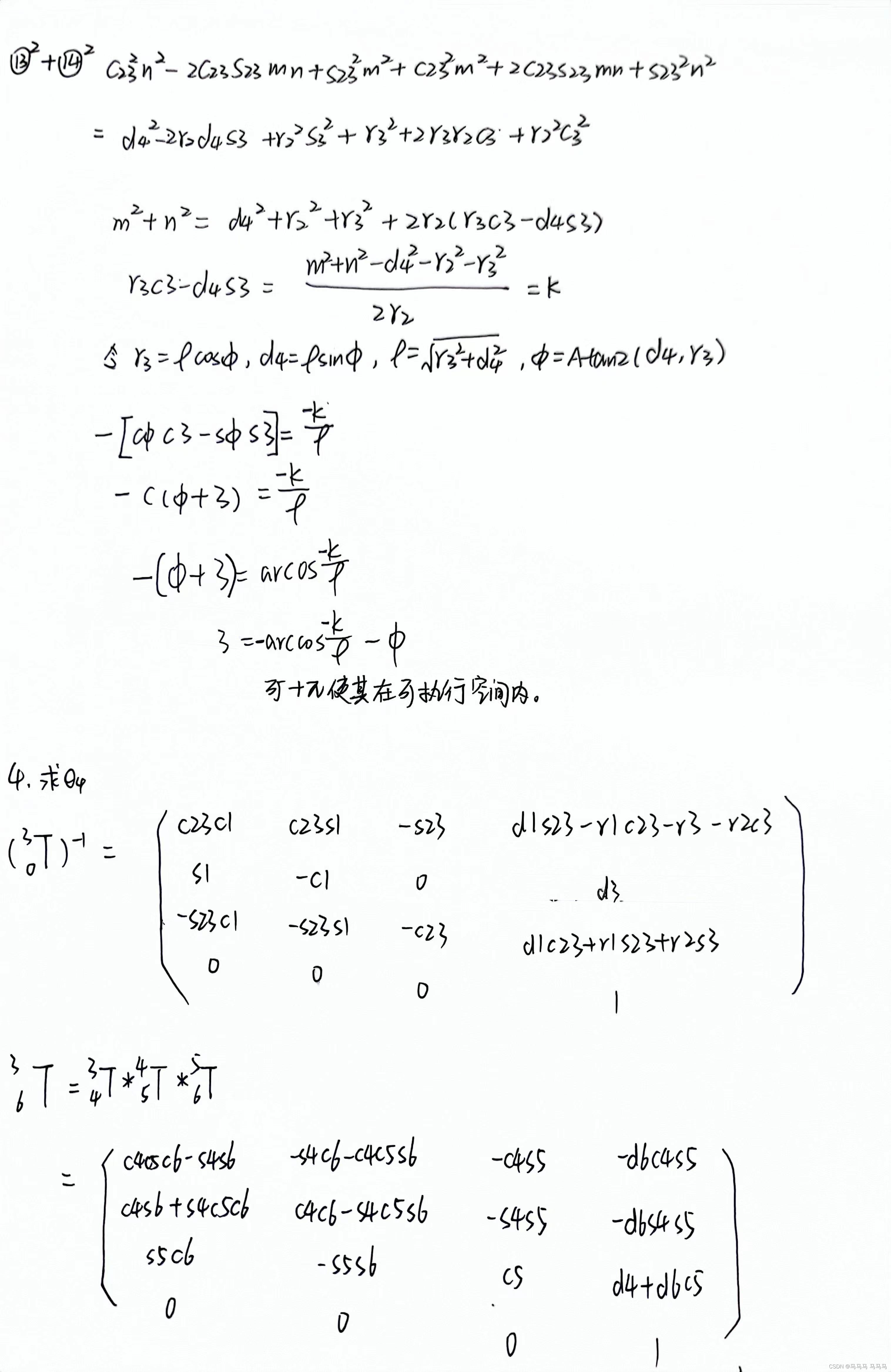
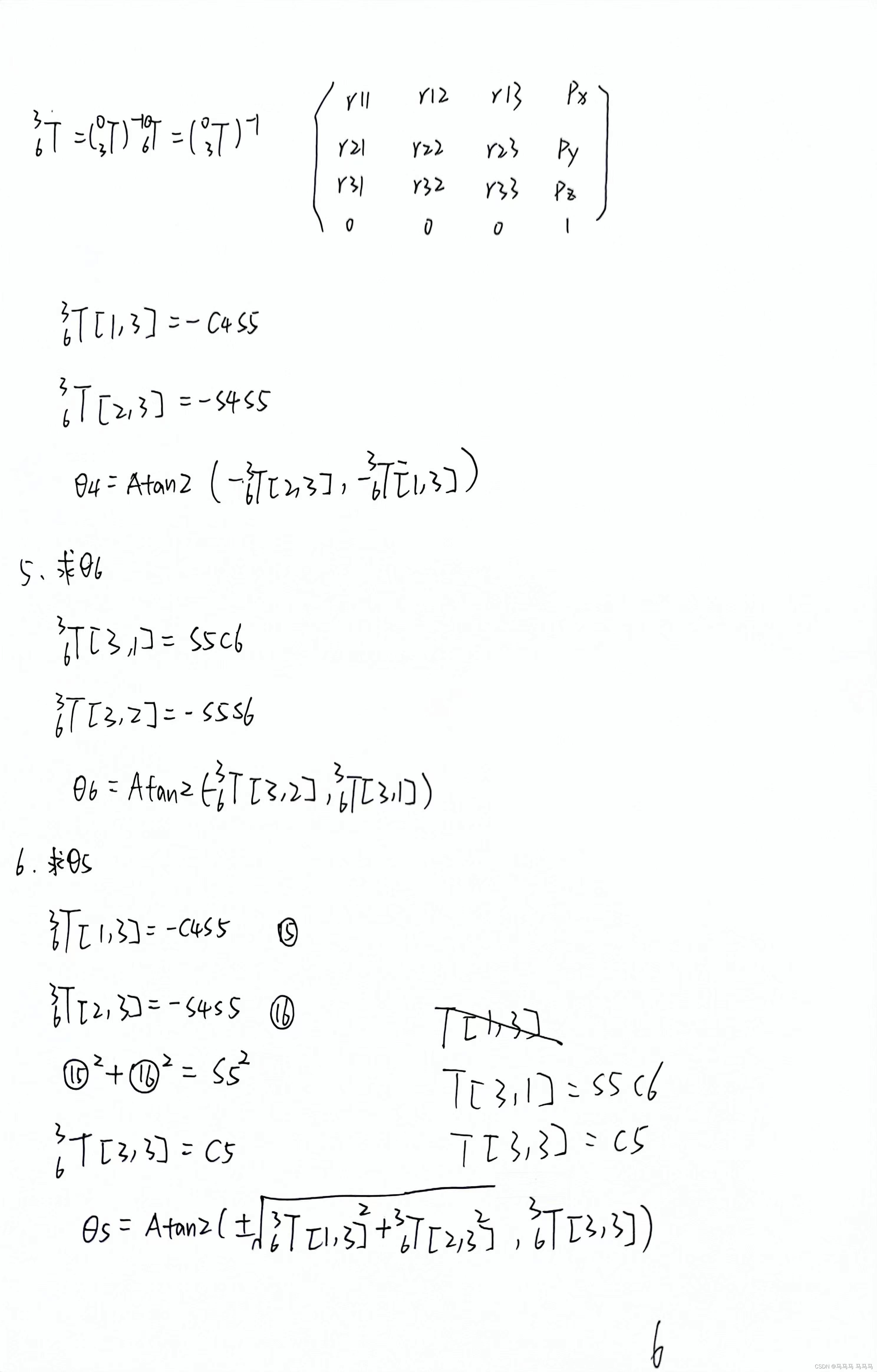
以上就是我对这个项目的理解,实践中也是根据这个项目进行改写的。通过matlab和实践的双重验证,运动学分析代码的准确率和可靠性非常高。如发现错误欢迎大家在评论区或私信指正,也欢迎大家一起交流学习机械臂内容。

















 1529
1529

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









