






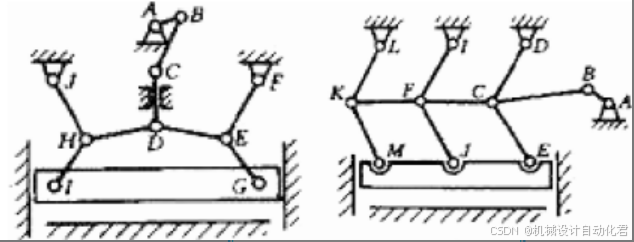
a.正确计算运动副的数目
(1)注意复合铰链:
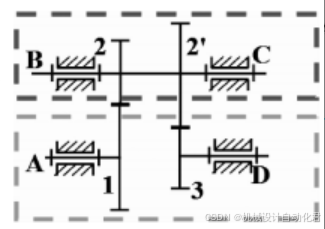
两个以上的构件在同一处以转动副连接就构成复合铰链
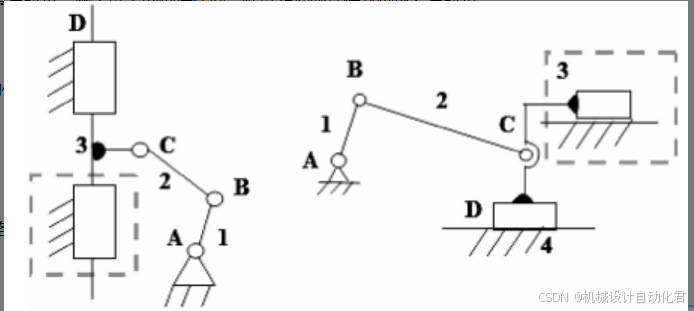
(2)K个构件,K-1个转动副

(3)多导路重合或平行的移动副,1一个移动副
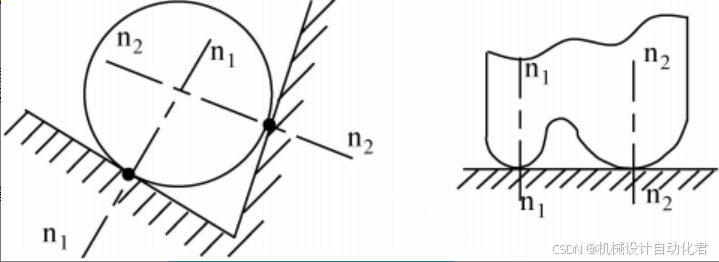
(4)两构件——多处接触——多轴线重合的转动副:1个转动副
(5)两构件——多处接触——接触点处公法线重合的高副:1个高副
(6)两构件——多处接触——接触点处公法线不重合的高副重合高副,即看成2个高副或看成低副
b.去除局部自由度
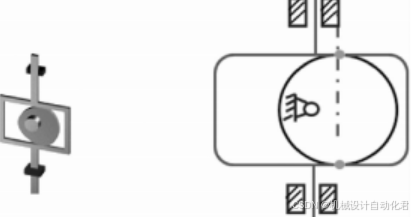
(1)定义:
在有些机构中,某些机构所产生的局部运动并不影响其他构件的运动,称这种局部运动的自由度为局部自由度
(2)计算:
将局部自由度减去
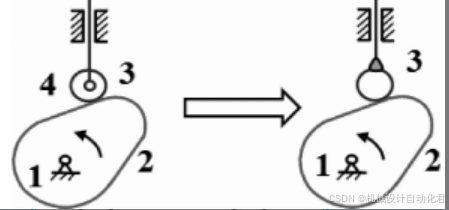
(3)作用:
滑动摩擦→滚动摩擦,减小磨损和摩擦
c.去除虚约束
Ⅰ两构件运动轨迹重合的点
转动副连接:该转动副为虚约束——去掉该转动副及与转动副相连的一个构件
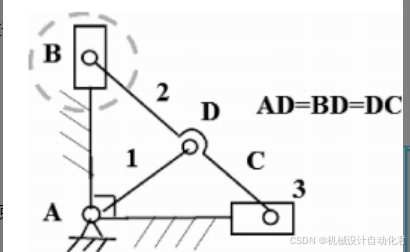
Ⅱ两运动构件上距离始终不变两点
双转动副连接:该双转动副为虚约束——去掉改双转动副及双转动副之间的连接件
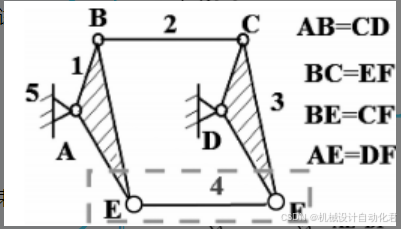
Ⅲ机构重复部分
不影响运动传递:该重复部分为虚约束——去掉该重复部分
Ⅳ说明
1、若结构中出现特殊几何关系,如平行且相等、对称、重复关系等,此时就需注意分析是否为虚约束
2、虚约束作用:改善机构受力情况,增加机构刚度
3、虚约束要求机构有较高的加工精度和装配精度;当达不到精度要求时,虚约束将成为有效约束,继而影响机构运动的可能性和灵活性


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









