






摘要:通过先进的机器人技术和人工智能,科学发现有望取得快速进展。 目前的科学实践面临着巨大的局限性,因为人工实验仍然耗时耗力,而多学科研究需要知识整合,超越单个研究人员的专业知识边界。 在这里,我们设想了一个自主的通才科学家(AGS)概念,它将代理人工智能和具身机器人技术结合起来,使整个研究生命周期自动化。 该系统可以与物理和虚拟环境动态交互,同时促进跨不同科学学科的知识整合。 通过在每个研究阶段(包括文献综述、假设生成、实验和手稿写作)部署这些技术,并将内部反思与外部反馈相结合,该系统旨在显著减少科学发现所需的时间和资源。 从虚拟人工智能科学家到多才多艺的通用人工智能机器人科学家,AGS展现了突破性的潜力。 随着这些自主系统越来越多地融入研究过程,我们假设科学发现可能会遵循新的缩放定律,这些定律可能由这些自主系统的数量和能力决定,为知识的产生和演变提供了新的视角。 嵌入式机器人对极端环境的适应性,加上积累科学知识的飞轮效应,有望不断超越物理和智力前沿。Huggingface链接:Paper page,论文链接:2503.22444
研究背景和目的
研究背景
随着人工智能(AI)和机器人技术的飞速发展,科学研究的范式正在发生深刻变革。传统的科学研究方法往往依赖于手工实验和专家知识,这一过程耗时耗力,且受到研究人员专业知识边界的限制。特别是在多学科交叉研究领域,传统方法往往难以有效整合来自不同学科的知识,从而限制了科学研究的创新性和效率。
近年来,大型语言模型(LLMs)和基础模型(Foundation Models)的出现为科学研究带来了新的机遇。这些模型经过大规模语料库的预训练,能够在多个领域生成和理解类似人类的文本,从而在信息合成、想法生成、编码和学术写作等任务中展现出卓越的能力。然而,当前的AI应用仍主要局限于特定、狭窄的任务,或纯数据驱动的研究,缺乏与物理世界的交互能力。
为了克服这些限制,机器人技术,特别是通用目的机器人,展现出了巨大潜力。这些机器人能够在实验室环境中执行精确的物理操作,加速数据收集和实验过程,提高科学研究的可重复性和准确性。然而,当前的AI和机器人系统尚未实现无缝集成,无法完全自主地进行科学研究。
研究目的
本研究旨在提出一个自主的通才科学家(Autonomous Generalist Scientist, AGS)概念,该概念结合代理AI和具身机器人技术,旨在自动化整个研究生命周期。AGS系统旨在动态地与物理和虚拟环境交互,促进跨不同科学学科的知识整合。通过部署这些技术在文献综述、假设生成、实验和手稿写作等每个研究阶段,并结合内部反思和外部反馈,AGS系统旨在显著减少科学发现所需的时间和资源。
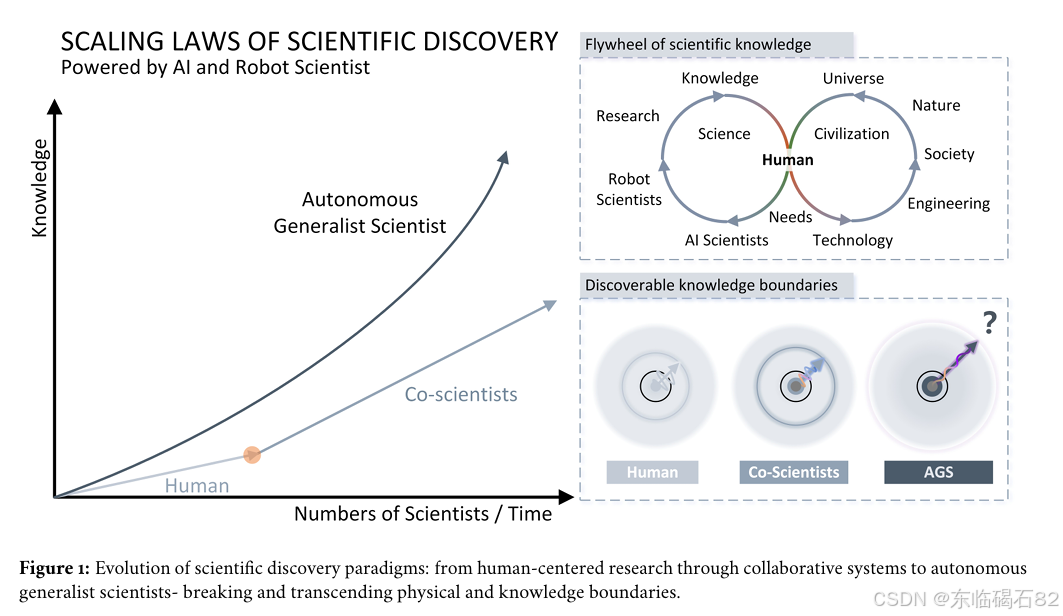
本研究还旨在探索随着这些自主系统越来越多地融入研究过程,科学发现可能遵循的新缩放定律。这些定律可能由自主系统的数量和能力决定,为知识的产生和演变提供新的视角。此外,本研究还希望展示嵌入式机器人对极端环境的适应性,以及积累科学知识的飞轮效应,如何共同推动科学研究不断超越物理和智力前沿。
研究方法
AGS系统框架
AGS系统由五个主要功能模块组成,每个模块都经过精心设计以支持科学研究的不同阶段:
-
文献综述模块:该模块能够自主地进行全面的研究分析,模拟人类与学术数据库和期刊平台的交互。它能够搜索、访问和管理相关文献,甚至克服订阅障碍。
-
假设生成模块:在文献分析的基础上,该模块制定全面的研究提案,明确问题陈述、目标和创新假设。它开发详细的方法论框架和实验协议,为虚拟模拟和物理实施提供明确的调查路线图。
-
实验模块:该模块协调研究的实验阶段,包括精确的计划、资源优化和跨虚拟和物理环境的试验执行。它利用先进的机器人和AI技术执行物理操作,收集实证数据,并进行虚拟实验。
-
手稿准备模块:在实验完成后,该模块将发现综合成准备出版的手稿。它进行全面的数据分析、结果解释和实质性结论制定,确保文档符合标准的学术惯例。
-
反思和反馈模块:该模块通过建立功能模块之间的通信渠道,实现系统范围内的持续改进。它整合来自人类合作者和模拟同行评审的外部输入,通过系统分析反馈来优化假设、方法和实验方法。
具体研究方法
-
文献综述的自动化:本研究探索了从传统的基于数据库或API的方法到先进的OS代理驱动的系统的转变。OS代理模仿人类与数字平台的交互,能够动态地从先前无法访问的来源(如订阅期刊、预印本服务器和会议录)检索信息。
-
假设生成的自动化:本研究利用LLMs生成具有更高新颖性的研究想法,并通过多代理架构对提案组件进行迭代细化。该架构包括专门化的组件,用于评估方法论的合理性、新颖性评估和可行性分析。
-
实验的自动化:本研究结合AI代理和机器人技术来执行虚拟和物理实验。AI代理处理编码、假设创建和数据分析等虚拟任务,而机器人则负责操作实验室工具和执行精确实验等物理任务。
-
手稿准备的自动化:本研究利用AI系统分析实验结果,生成初步的手稿草稿,并智能地集成多样化内容(如图表和视频)。此外,还通过内部和外部评审机制对手稿进行强化。
研究结果
AGS系统的潜力
AGS系统展示了在自动化科学研究方面的巨大潜力。通过结合AI和机器人技术,AGS系统能够动态地与物理和虚拟环境交互,促进跨不同科学学科的知识整合。这种整合不仅加速了科学研究的进程,还提高了研究的质量和创新性。
具体来说,AGS系统在文献综述、假设生成、实验和手稿写作等各个阶段都表现出了显著的优势。在文献综述阶段,AGS系统能够自主地搜索、访问和管理相关文献,克服了传统方法中的订阅障碍和信息获取限制。在假设生成阶段,AGS系统能够利用LLMs生成具有更高新颖性的研究想法,并通过多代理架构对提案进行迭代细化。在实验阶段,AGS系统能够结合AI代理和机器人技术执行虚拟和物理实验,提高了实验的精确性和可重复性。在手稿准备阶段,AGS系统能够利用AI系统分析实验结果,生成初步的手稿草稿,并通过内部和外部评审机制对手稿进行强化。
科学发现的缩放定律
随着AGS系统越来越多地融入研究过程,科学发现可能会遵循新的缩放定律。这些定律可能由自主系统的数量和能力决定,为知识的产生和演变提供新的视角。此外,嵌入式机器人对极端环境的适应性以及积累科学知识的飞轮效应将进一步推动科学研究不断超越物理和智力前沿。
研究局限
尽管AGS系统展示了巨大的潜力,但目前的研究仍存在一些局限性。首先,当前的AI和机器人系统尚未实现无缝集成,无法完全自主地进行科学研究。特别是在执行复杂实验和应对突发情况时,仍需人类研究人员的监督和干预。其次,AGS系统的性能受到可用数据和计算资源的限制。为了充分发挥AGS系统的潜力,需要不断收集高质量的数据和优化计算资源。此外,AGS系统的开发和应用还面临伦理和法律方面的挑战,需要制定相应的规范和标准来确保其合规性和安全性。
未来研究方向
为了克服当前研究的局限性并推动AGS系统的进一步发展,未来可以从以下几个方面进行研究:
-
加强AI和机器人技术的集成:探索更高效的方法将AI代理和机器人技术集成在一起,以实现更高级别的自主性和协同性。这将有助于AGS系统更好地应对复杂实验和突发情况。
-
提高数据和计算资源的利用效率:开发更先进的数据处理和计算方法,以提高AGS系统的性能和效率。这将有助于AGS系统更好地利用可用资源和加速科学研究进程。
-
制定伦理和法律规范:针对AGS系统的开发和应用制定相应的伦理和法律规范,确保其合规性和安全性。这将有助于建立公众对AGS系统的信任并推动其广泛应用。
-
拓展AGS系统的应用场景:探索AGS系统在更多科学领域的应用场景,如生物医学、环境科学和天文学等。这将有助于进一步验证AGS系统的通用性和实用性。
综上所述,AGS系统作为一个结合代理AI和具身机器人技术的自主科学研究平台,展示了巨大的潜力和应用前景。通过不断的研究和探索,我们有望克服当前的局限性并推动AGS系统的进一步发展,为科学研究的自动化和创新性提供有力支持。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









