







首先,我们得了解HashMap底层是如何存储数据的,它是如何添加元素的。
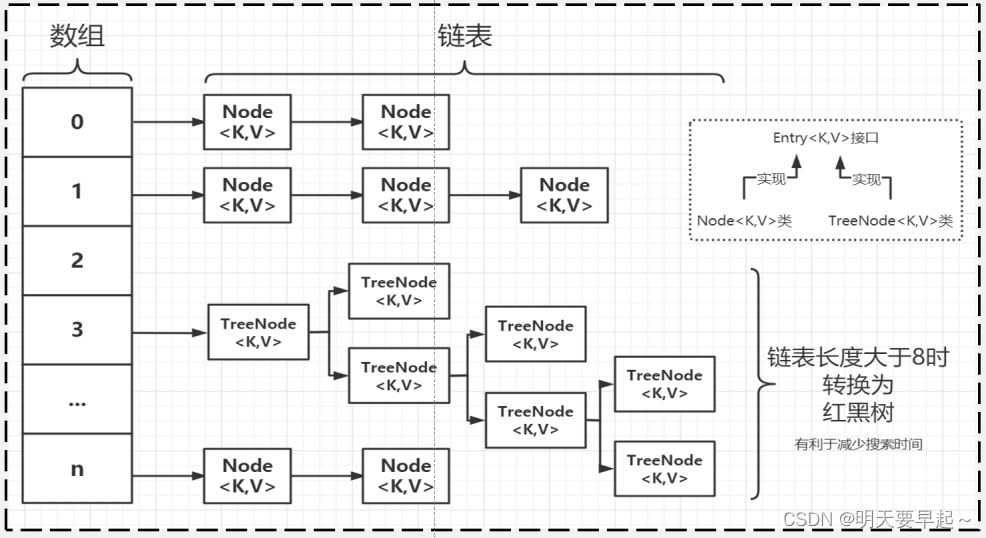
HashMap 内部数据结构使用数组+链表+红黑树进行存储。数组类型为 Node[],每个Node 都保存了某个KV键值对元素的 key 、 value、hash、next 等值。由于next 的存在,所以每个Node对象都是一个单向链表中的组成节点。
当新添加一个KV键值对元素时,通过该元素的 key的 hash 值,计算该元素在数组中应该保存的下标位置。如果该下标位置如果已经存在其它Node 对象(产生哈希冲突),则采用链地址法处理,即将新添加的KV键值对元素将以链表形式存储。将新元素封装成一个新的Node 对象,插入到该下标位置的链表尾部(尾插法)。当链表的长度超过 8并目数组长度大干64 时,为了避免查找搜索性能下降,该链表会转换成一个红黑树。
如图所示:
HashMap的数据结构定义:
public class HashMap{
// 每个Node既保存一个KV键值对,同时也是链表中的一个节点
Node<K,V>[] table;
}
public class HashMap{
// ...
// 静态内部类Node
static class Node<K,V> implements Map.Entry<K,V> {
final int hash; // 哈希值
final K key; // 键
V value; // 值
Node<K,V> next; // 下一个节点(由于只拥有next,所以该链表为单向链表)
}
// ...
}
然后我们来了解下HashMap的hash函数,HashMap初始容量,HashMap扩容,什么时候扩容?
HashMap的hash函数:
HashMap 通过新添加元素 key的 hashCode()方法,计算一个hash值,然后通过这个hash值计算位置下标。
static final int hash(Object key) {
int h;
// 通过key的hashCode()方法返回的哈希值与它的高16位进行异或运算
// 作用:计算出的hash值,在计算下标位置时,会更“散列”,减少哈希冲突
return (key == null) ? 0 : (h = key.hashCode()) ^ (h >>> 16);
}
HashMap初始容量:
首先HashMap 初始化时,默认的数组大小只有 16 ,通过位运算 1<<4 计算得出。并且,数组的长度必须为2”(MUST be a powerof two),因为数组长度为2的n次幂时,可以使用&与位运算,结合hash值,快速计算该元素在数组中的下标位置,提高 HashMap 的使用效率。
添加时,通过key的hash 值,使用&按位与位运算,计算该元素在数组中的下标。作用等同于hash %数组长度
int index = (数组长度 - 1) & key的hash值
由干计算机底层进行取模运算时,分为两步,第一步求商,即c=a/b:第二步求余数,即r=a-c*b,这两步包含了除法,乘法和减法运算,所以效率不高,使用位运算,计算结果相同,并且效率高。前提是,数组容量必须为2的n次幂。
HashMap扩容
HashMap 底层采用数组+链表+红黑树,扩容过程中需要按照数组容量和加载因子来进行判断。
数组容量:基础数组Node<K,v>[l table的长度。如果没有指定容量,添加第一个元素时,该数组按照默认值 16 进行初始化
加载因子:用来表示 HashMan 集合中元素的埴满程度,默认为 0.75f,越大则表示允许埴满的元素就越多,集合的空间利用率就越
高,但是冲突的机会增加。反之,越小则冲突的机会就会越少,但是空间很多就浪费。
public class HashMap{
static final int DEFAULT_INITIAL_CAPACITY = 1 << 4; // aka 16
static final float DEFAULT_LOAD_FACTOR = 0.75f;
}
什么时候扩容?
HashMap 的扩容方法是 resize()方法,发生下列两种情况时,会发生扩容:
情况1:HashMap中的元素个数超过扩容阈值 threshold时,就会进行数组扩容(扩容阈值threshold =数组容量x加载因子)。例如:加载因子(LoadFactor)的默认值为0.75f,数组容量默认为16,当HashMap 中元素个数超过 16x0.75=12的时候,数组就会扩容。
情况2:HashMap 加入新元素时,如果链表长度大干8时,会将当前链表转换为红黑树。在转换红里树之前,会判断数组长度,如果
小于64,会产生数组扩容。如果数组长度大于64,才会将链表转换为红黑树。(链表属于线性查找,速度慢)
// 添加新元素
final V putVal(int hash, K key, V value) {
//...
// 判断当前集合中的元素数量,是否超过阈值threshold
if (++size > threshold)
resize(); // 数组扩容
//...
}// 链表转换为红黑树
final void treeifyBin(Node<K,V>[] tab, int hash) {
//...
// 数组为空或者数组的长度n小于64
if (tab == null || (n = tab.length) < MIN_TREEIFY_CAPACITY)
resize(); // 数组扩容
// ...
}
public class HashMap{
// 默认链表长度
static final int TREEIFY_THRESHOLD = 8;
// 添加键值对的方法
final V putVal(int hash, K key, V value){
//...
// 将key和value,插入链表尾部
// 循环时,使用binCount进行计数
for (int binCount = 0; ; ++binCount) {
// 判断节点p的next是否空
if ((e = p.next) == null) {
// 插入链表尾部
p.next = newNode(hash, key, value, null);
// 判断链表数量是否大于8
if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1st
// 链表长度超过8,将当前链表转换为红黑树
treeifyBin(tab, hash);
break;
}
}
}
// 转换为红黑树
final void treeifyBin(Node<K,V>[] tab, int hash) {
int n, index; Node<K,V> e;
// 数组长度如果小于64,则优先扩容数组
if (tab == null || (n = tab.length) < MIN_TREEIFY_CAPACITY)
resize();
else if ((e = tab[index = (n - 1) & hash]) != null) {
// 遍历链表节点,转换为红黑树
TreeNode<K,V> hd = null, tl = null;
do {
TreeNode<K,V> p = replacementTreeNode(e, null);
if (tl == null)
hd = p;
else {
p.prev = tl;
tl.next = p;
}
tl = p;
} while ((e = e.next) != null);
if ((tab[index] = hd) != null)
hd.treeify(tab);
}
}
}
HashMap 每次扩容时,会按照当前数组的容量扩容2倍。例如:当前数组容量为16,当HashMap 中元素个数超过16x0.75=12 的时候,数组就会扩容 2 倍















 565
565











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









