






介绍:
通过红外遥控键盘的数字进行控制直流电机的转速
效果图:
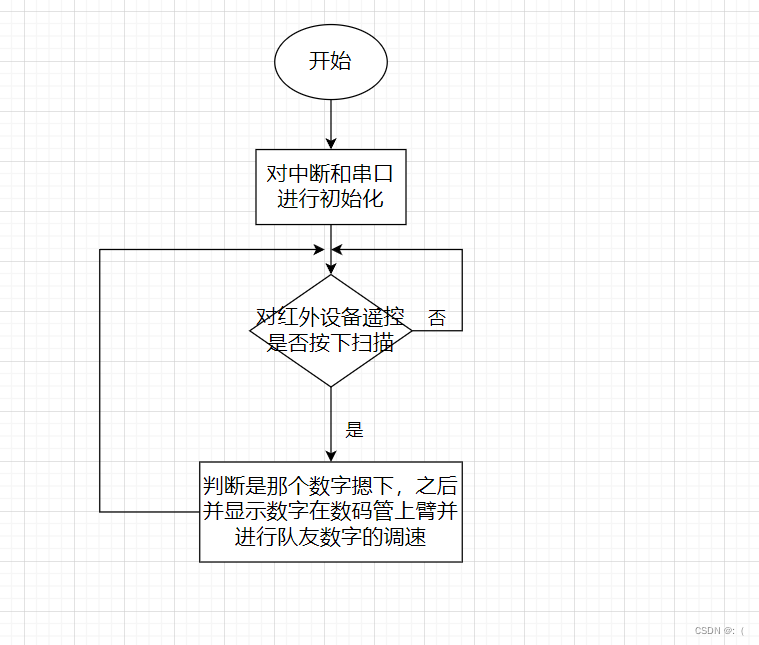
流程图:
代码:
#include <reg52.h> //包含51单片机相关的头文件
#define uint unsigned int //重定义无符号整数类型
#define uchar unsigned char //重定义无符号字符类型
sbit duan=P2^6;
sbit wei=P2^7;
sbit FM=P2^3; //定义蜂鸣端口
sbit IRIN=P3^3; //定义红外接收端口
uchar jieshou;
sbit dianji=P1^7; //控制电机 IO 口定义
//uchar flag,a,i;
uchar IRCOM[7]; //遥控解码缓存数组
uchar code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,
0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};数码管显示数据表
uchar gao,di;
void display(uchar a);
void qudong();
void dispose(uchar x);
uchar code ShowData[]={ //遥控板外观示数(遥控板外观不一,以实际为主)
1,2,3, // 1 2 3
4,5,6, // 4 5 6
7,8,9, // 7 8 9
0x40,0,0x40, // - 0 -
0x40,0x40,0x40, // - - -
0x40,0x40,0x40, // - - -
0x40,0x40,0x40}; // - - -
uchar code RecvData[]={ //遥控板实际编码(如果遥控板不同,可发送至上位机读取,并修改)
0x45,0x46,0x47, // 45 46 47
0x44,0x40,0x43, // 44 40 43
0x07,0x15,0x09, // 07 15 09
0x16,0x19,0x0d, // 16 19 0D
0x0c,0x18,0x5e, // 0C 18 5E
0x08,0x1c,0x5a, // 08 1C 5A
0x42,0x52,0x4a}; // 42 52 4A
void init()
{
TMOD=0X20; //设定T1定时器工作方式2
TH1=0XFD; //T1定时器装初值
TL1=0XFD; //T1定时器装初值
TR1=1; //启动T1定时器
//REN=1; //允许串口接收
SM0=0; //设定串口工作方式1
SM1=1; //设定串口工作方式1
EA=1; //开总中断
//ES=1; //开串口中断
EX1=1; //开启外部中断1
IT1=1; //设定外部中断1为低边缘触发类型
}
void delayms(unsigned char x) //0.14mS延时程序
{
unsigned char i; //定义临时变量
while(x--) //延时时间循环
{
for (i = 0; i<13; i++) {} //14mS延时
}
}
void IR_IN() interrupt 2 using 0 //定义INT1外部中断函数
{
unsigned char j,k,N=0; //定义临时接收变量
dispose(jieshou);
qudong();
EX1 = 0; //关闭外部中断,防止再有信号到达
delayms(15); //延时时间,进行红外消抖
if (IRIN==1) //判断红外信号是否消失
{
EX1 =1; //外部中断开
return; //返回
}
while (!IRIN) //等IR变为高电平,跳过9ms的前导低电平信号。
{
dispose(jieshou); //这两部是解决数码管在中断服务程序函数当中出现闪烁的问题
qudong();
delayms(1); //延时等待
}
for (j=0;j<4;j++) //采集红外遥控器数据
{
for (k=0;k<8;k++) //分次采集8位数据
{
while (IRIN) //等IR 变为低电平,跳过4.5ms的前导高电平信号。
{
delayms(1); //延时等待
}
while (!IRIN) //等 IR 变为高电平
{
delayms(1); //延时等待
}
while (IRIN) //计算IR高电平时长
{
delayms(1); //延时等待
N++; //计数器加加
if (N>=30) //判断计数器累加值(XS128 N 值为100)
{
EX1=1; //打开外部中断功能
return; //返回
}
}
IRCOM[j]=IRCOM[j] >> 1; //进行数据位移操作并自动补零
if (N>=8) //判断数据长度 (XS128 为30)
{
IRCOM[j] = IRCOM[j] | 0x80; //数据最高位补1
}
N=0; //清零位数计录器
}
}
if (IRCOM[2]!=~IRCOM[3]) //判断地址码是否相同
{
EX1=1; //打开外部中断
return; //返回
}
for(j=0;j<21;j++) //循环进行键码解析
{
if(IRCOM[2]==RecvData[j]) //进行键位对应
{
jieshou=ShowData[j]; //数码管显示相应数码赋值给变量
}
}
EX1 = 1; //外部中断开
}
void display(uchar a)
{
duan=1;
P0=table[a];
duan=0;
P0=0xff;
wei=1;
P0=0xfe;
wei=0;
delayms(1);
duan=1;
P0=table[0];
duan=0;
P0=0xff;
wei=1;
P0=0xfd;
wei=0;
delayms(1);
duan=1;
P0=table[0];
duan=0;
P0=0xff;
wei=1;
P0=0xfb;
wei=0;
delayms(1);
duan=1;
P0=table[0];
duan=0;
P0=0xff;
wei=1;
P0=0xf7;
wei=0;
delayms(1);
}
void qudong()
{
uchar i;
EX1=0;//关闭中断,防止进入到中断影响直流电机调速处理
if(di)
{
for(i=0;i<di;i++)
{
dianji=0;//实现 PWM 信号低电平输出(PWM其实是矩阵函数)
display(jieshou);//利用显示函数起延时作用,这样也不影响数码管显示,一举两得
}
}
for(i=0;i<gao;i++)
{
dianji=1;//实现 PWM 信号高电平输出
display(jieshou);
}
EX1=1;//调速完毕需要恢复外部中断1
}
void dispose(uchar x)
{
switch(x)
{
case 0:gao=0;di=4;break;
case 1:gao=1;di=3;break;//PWM 信号中高电平持续时间标志为 1;PWM 信号中低电平持续时间标志为 3,此时速度最慢
case 2:gao=2;di=2;break;
case 3:gao=3;di=1;break;
case 4:gao=4;di=0;break;//此时速度最快
}
}
void main(void) //主程序入口
{
init(); //初始化
while(1)
{
SBUF=IRCOM[2]; //向上位机串口发送遥控板解码值
if(IRCOM[2]==0x18)//IRCOM[]数组存取的是红外遥传送过来的值,存取在这个数组当中有四位,其中前两位是用户码,用来确认设备,第三位是数据码,第四位是数据码的反码,用来确认数据准确的
FM=0;
if(IRCOM[2]==0x52)
FM=1;
dispose(jieshou);
qudong();
}
}
总结:
1:红外遥控最开始的键码值与别人的键码不一致,后面参考改变遥控外观示数来达到控制
2:VS1838的时间控制掌握不太详细,最开始的等待起始码和用户码,后面用来接受数据码和其反码
3:VS1838的控制引脚接的是单片机外部中断1上,并且设置为下降沿触发(IT1=1),是因为当这个下降沿来的时候开始用定时器计时,一直计 时到下一个下降沿,前面说的, (以450us 的低电平和900us 的高电平代表“0” ;以450us 的低电平和1200us 的高电平代表“1” )如果我检测到两个下降沿之间的时间是1350us 那 是不是就代表是0,如果是1650us 就是1。

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









