






(一)、中断模式和DMA模式
1、中断模式介绍
当CPU收到中断或者异常时,它会暂停执行当前的程序或任务,通过一定的机制跳转到负责处理这个信号的相关处理程序中,在完成对这个信号的处理后再跳转回刚才被打断的程序或任务中继续执行,其具体的处理过程如下。

中断允许嵌套,不同的中断有不同的优先级,高优先级的中断可以打断低优先级的中断。
中断分组分为抢占优先级和子优先级,在中断发生时,同抢断优先级的互不打断。同抢占优先级且同时发生的中断,才看子优先级。
EXTI管理了控制器的20个中断/事件线。每个中断/事件线都对应有一个边沿检测器,可以实现输入信号的上升沿检测和下降沿的检测。EXTI可以实现对每个中断/事件线进行单独配置,可以单独配置为中断或者事件,以及触发事件的属性。
外部:芯片里的GPIO。可以对外输出0或1,输入的时候也可以检测输入的是0还是1.当出现0和1之间变化的时候,就会产生一个中断,也可以产生一个事件。
2、DMA模式介绍
DMA(Direct memory access)直接内存访问,被用于内存和内存之间或内存和外设之间的高速数据传输。数据传输可以在没有CPU的干预下快速移动,这样可以保持CPU资源处理其他事情。DMA 控制器基于复杂的总线矩阵架构,将功能强大的双 AHB 主总线架构与独立的 FIFO 合在一起,优化了系统带宽。
输入线:EXTI 0-15是连接到GPIO的(每一个GPIO端口都有16个引脚),当我们使用EXTI0的时候,控制的是所有端口的第0个引脚。具体是哪个端口,在AFIO_EXTICR1、2、3、4这4个寄存器的EXTIx[3:0]位控制。(x属于0-15)
边沿检测电路:检测上升沿还是下降沿,由上升沿触发选择寄存器(EXTI_RTSR)和下降沿触发选择寄存器(EXTI_FTSR)控制。
或门:收到边沿检测电路传出的信号和软件中断事件寄存器(EXTI_SWIER)控制。软件中断事件寄存器返回1之后,就不受边沿检测电路控制。
在经过或门之后,分为两路:当中断屏蔽寄存器和请求挂起寄存器相关位都置1的时候就会产生中断,交给NVIC,再交给内核相应。如果事件屏蔽寄存器相关位置1,就会把这个1信号给脉冲发生器,产生脉冲(脉冲就是高电平)。脉冲:ITM定时器开始计数、触发ADC的采集。【作为触发信号】。
3、串口通信
串口通讯(Serial Communication)是一种设备间非常常用的串行通讯方式,因为它简单便捷,因此大部分电子设备都支持该通讯方式,其通讯协议可分层为协议层和物理层。物理层规定通信协议中具有机械、电子功能的特性,从而确保原始数据在物理媒体的传播;协议层主要规定通讯逻辑,统一双方的数据打包、解包标准。通俗的讲物理层规定我们用嘴巴还是肢体交流,协议层规定我们用中文还是英文交流。
(二)、通过CubeMX中断模式创建项目进行串口通信。
1、项目目的
STM32系统给上位机(win10)连续发送“hello windows!”;当上位机给stm32发送字符“stop”后,stm32暂停发送“hello windows!”;发送一个字符“start”后,stm32继续发送。
(三)、通过CubeMX使用DMA模式创建项目进行串口通信。
1、项目目的
STM32系统给上位机(win10)连续发送“hello windows!”;当上位机给stm32发送字符“stop”后,stm32暂停发送“hello windows!”;发送一个字符“start”后,stm32继续发送。
2、打开STM32CubeMX,选择新建项目 芯片这里选择STM32F103C8T6


2、创建后对SYS进行配置,选择Serial Wire

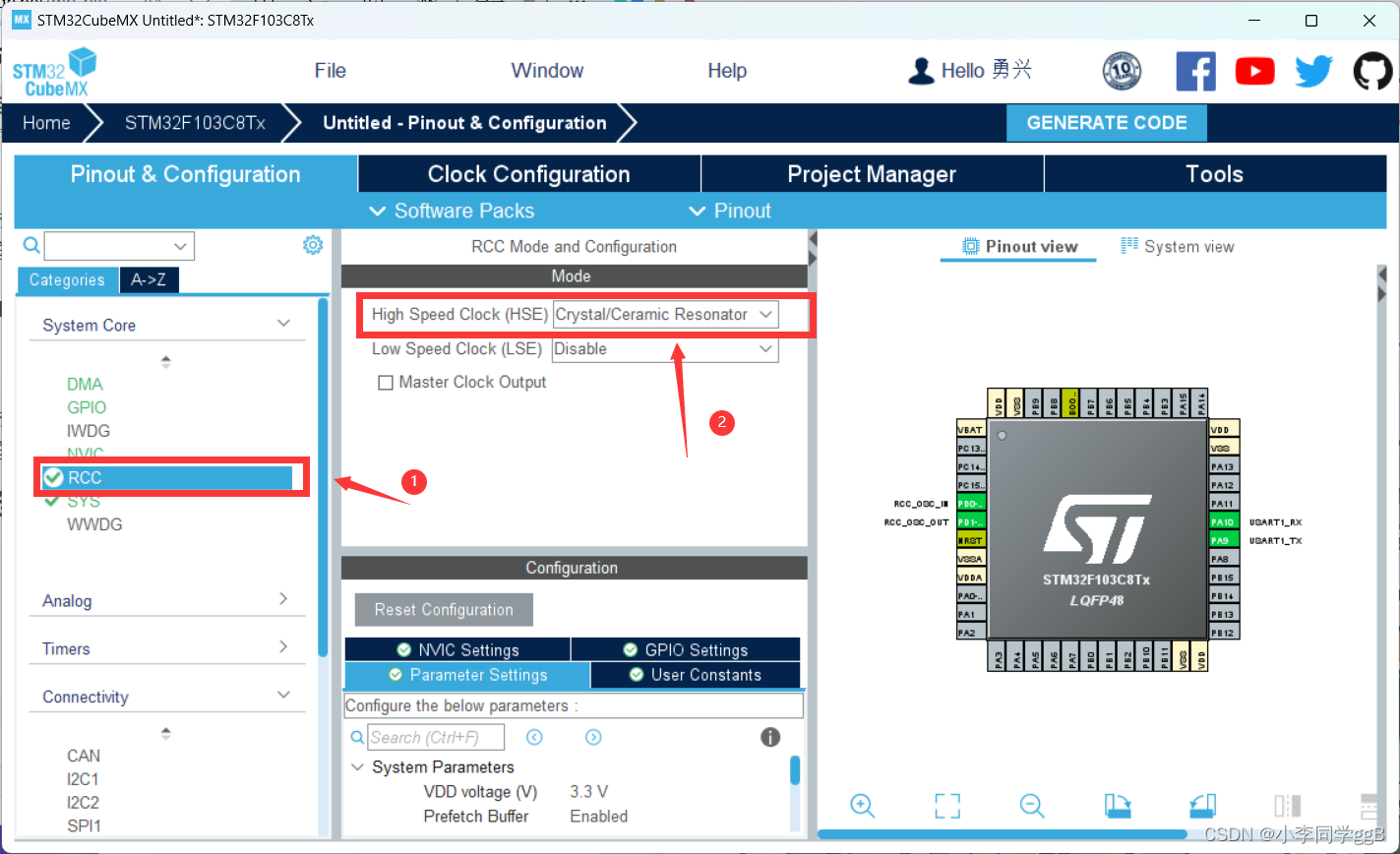
3、对RCC进行配置,选择Crydtal/Ceramic Resonator

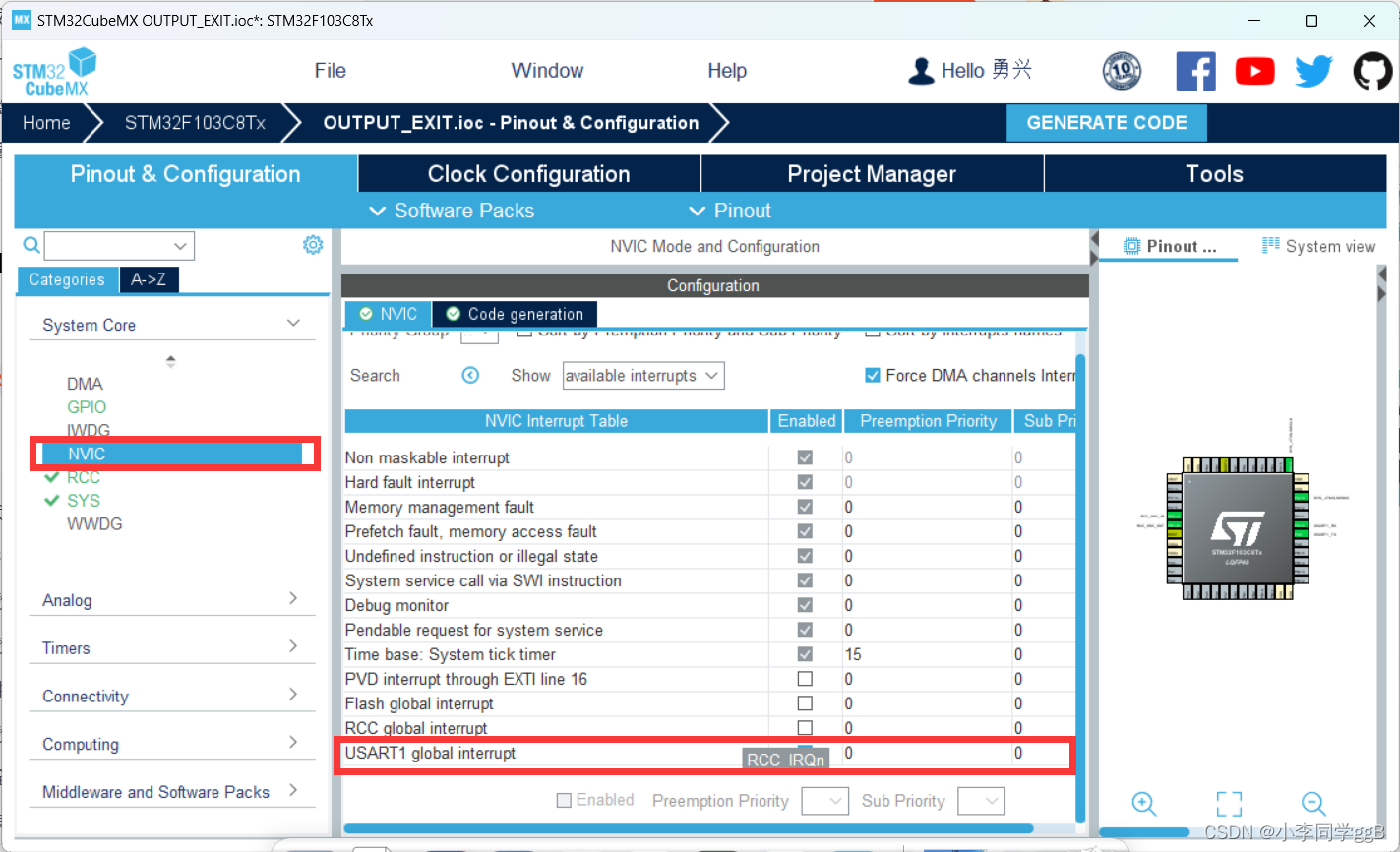
4、对USART进行配置,选择Asynchronous 设置NVIC
5、创建项目


(三)、在Keil中编写代码(发送“hello world”)
打开keil5软件,在main函数前定义全局变量
char c;//指令 0:停止 1:开始
char message[]="hello Windows\n";//输出信息
char tips[]="CommandError\n";//提示1
char tips1[]="Start.....\n";//提示2
char tips2[]="Stop......\n";//提示3
int flag=0;//标志 0:停止发送 1.开始发送
在main函数中设置接收中断
函数原型
HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)
功能:串口中断接收,以中断方式接收指定长度数据。
大致过程是,设置数据存放位置,接收数据长度,然后使能串口接收中断。
接收到数据时,会触发串口中断。
再然后,串口中断函数处理,直到接收到指定长度数据
而后关闭中断,进入中断接收回调函数,不再触发接收中断。(只触发一次中断)
参数:
UART_HandleTypeDef *huart UATR的别名
huart1 *pData 接收到的数据存放地址
Size 接收的字节数
HAL_UART_Receive_IT(&huart1, (uint8_t *)&c, 1);
main函数中的while循环里面添加传输代码
if(flag==1){
//发送信息
HAL_UART_Transmit(&huart1, (uint8_t *)&message, strlen(message),0xFFFF);
//延时
HAL_Delay(1000);
}
在main函数下面重写中断处理函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
//当输入的指令为0时,发送提示并改变flag
if(c=='0'){
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips2, strlen(tips2),0xFFFF);
}
//当输入的指令为1时,发送提示并改变flag
else if(c=='1'){
flag=1;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips1, strlen(tips1),0xFFFF);
}
//当输入不存在指令时,发送提示并改变flag
else {
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips, strlen(tips),0xFFFF);
}
//重新设置中断
HAL_UART_Receive_IT(&huart1, (uint8_t *)&c, 1);
}
main.c主函数全部代码:
#include "main.h"
#include "usart.h"
#include "gpio.h"
#include <string.h>
void SystemClock_Config(void);
char c;//指令 0:停止 1:开始
char message[]="hello Windows\n";//输出信息
char tips[]="CommandError\n";//提示1
char tips1[]="Start.....\n";//提示2
char tips2[]="Stop......\n";//提示3
int flag=0;//标志 0:停止发送 1.开始发送
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
//设置接受中断
HAL_UART_Receive_IT(&huart1, (uint8_t *)&c, 1);
//当flag为1时,每秒发送一次信息
//当flag为0时,停止
while (1)
{
if(flag==1){
//发送信息
HAL_UART_Transmit(&huart1, (uint8_t *)&message, strlen(message),0xFFFF);
//延时
HAL_Delay(1000);
}
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
//当输入的指令为0时,发送提示并改变flag
if(c=='#'){
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips2, strlen(tips2),0xFFFF);
}
//当输入的指令为1时,发送提示并改变flag
else if(c=='*'){
flag=1;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips1, strlen(tips1),0xFFFF);
}
//当输入不存在指令时,发送提示并改变flag
else {
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips, strlen(tips),0xFFFF);
}
//重新设置中断
HAL_UART_Receive_IT(&huart1, (uint8_t *)&c, 1);
}
/* USER CODE END 4 */
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}编译,可以看到没有问题 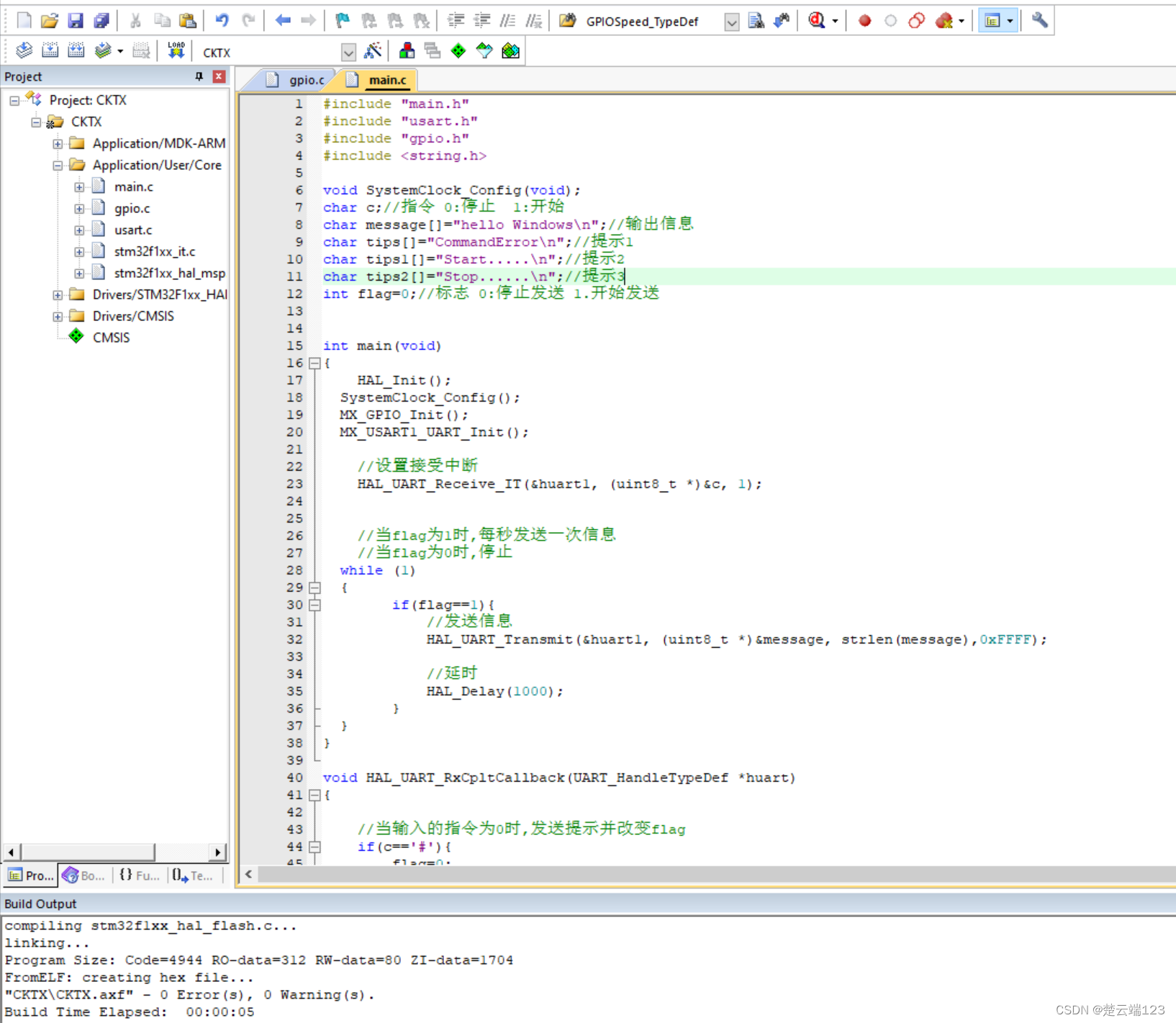 打开烧录程序
打开烧录程序 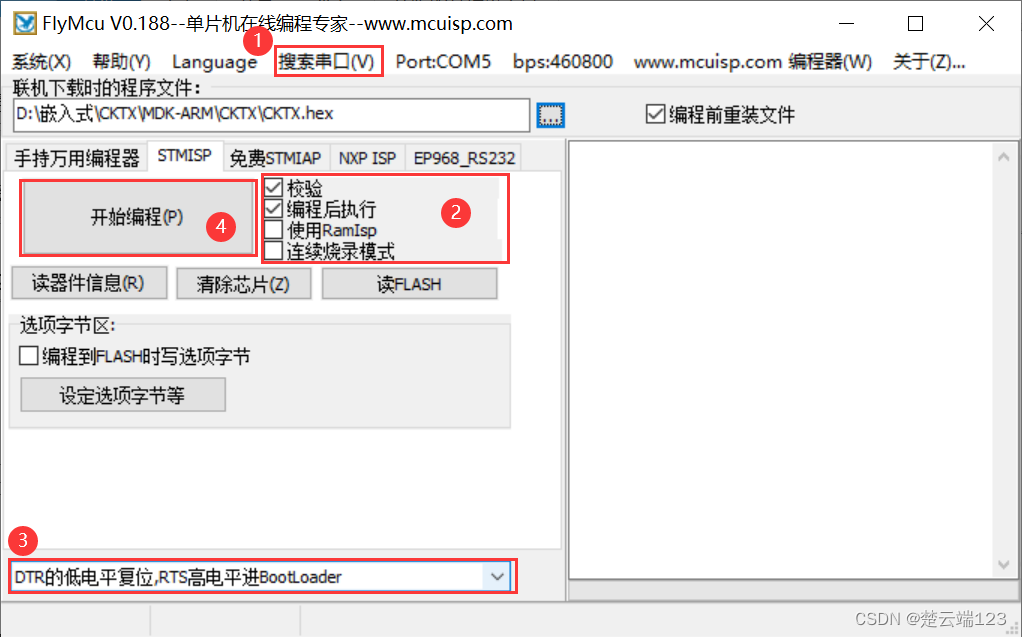 打开串口通信助手
打开串口通信助手 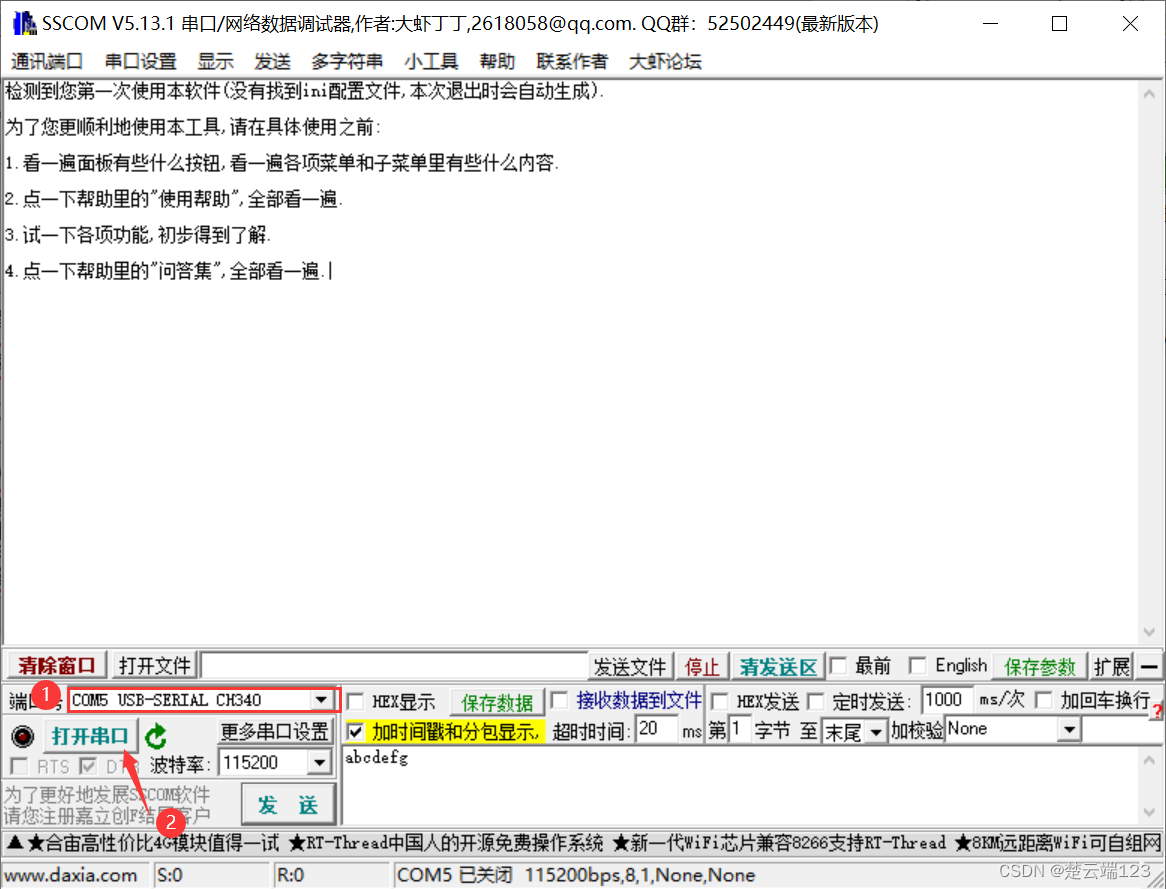 查看结果
查看结果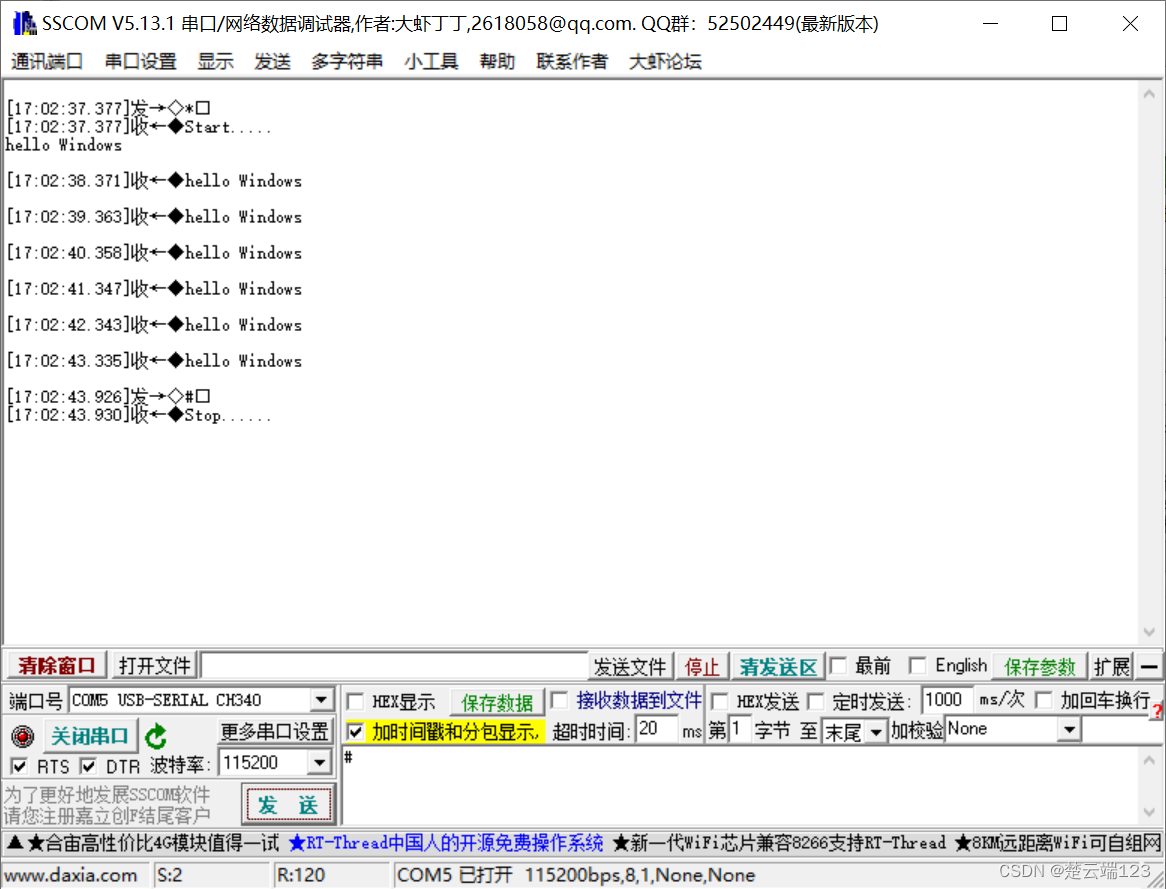
2、通过CubeMX创建项目
*,创建新项目芯片选择STM32F103C8T6,设置RCC
*设置USART1 ,选择异步通信,下方参数默认。

*使能串口

*添加两个通道

*创建项目


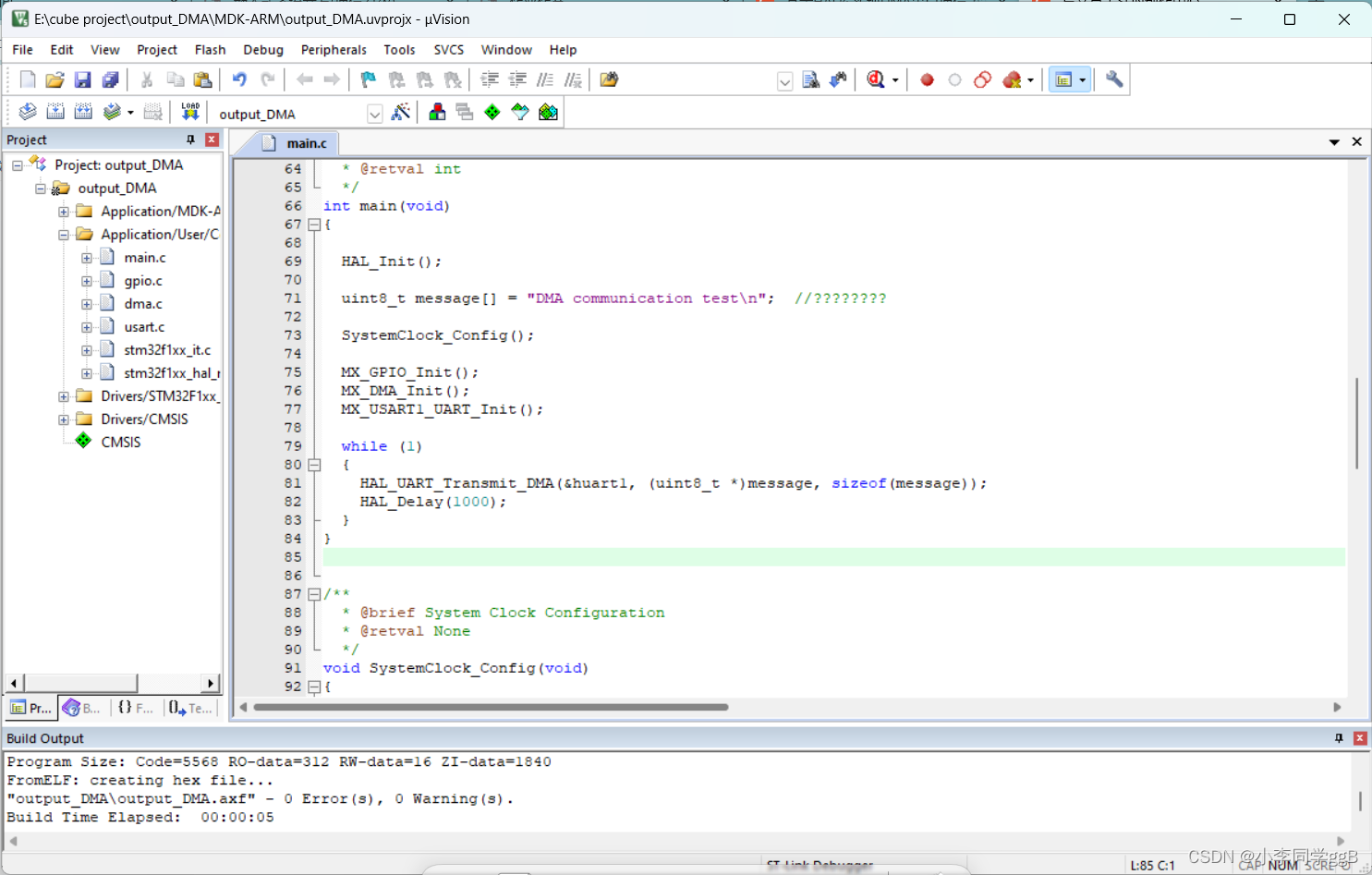
3、使用KEIL打开创建的项目,并将main函数中的代码修改为如下代码。
int main(void)
{
HAL_Init();
uint8_t message[] = "DMA communication test\n"; //定义数据发送数组
SystemClock_Config();
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
while (1)
{
HAL_UART_Transmit_DMA(&huart1, (uint8_t *)message, sizeof(message));
HAL_Delay(1000);
}
}















 332
332











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









