







目录
1. 前言
在控制系统中,PID控制是最常用的控制算法之一,但它在面对复杂的非线性系统或参数变化较大的系统时,往往难以达到理想的控制效果。模糊PID控制结合了模糊逻辑和传统PID控制的优点,通过模糊推理调整PID参数,使得控制器能够更好地适应复杂环境。本文将详细介绍模糊PID控制的原理,并通过Python代码实现一个完整的模糊PID控制器,帮助大家理解这一技术的实际应用。
因为基础PID实例也是用的温控系统,所以两者对比更好理解,基础PID温控系统可以参考:
《最最最基础常用的控制:PID【基础+代码实例:温控系统】》
2. 模糊PID控制的基本原理
2.1 传统PID控制的局限性
传统PID控制器通过比例(P)、积分(I)和微分(D)三个参数来调节控制量,其控制公式为:

其中,e(t) 是系统的误差信号,Kp、Ki 和 Kd 分别是比例、积分和微分系数。然而,PID控制器的性能高度依赖于这三个参数的整定,而在实际应用中,系统参数可能随时间变化,导致PID控制器难以保持良好的控制效果。
2.2 模糊控制的基本思想
模糊控制是一种基于模糊逻辑的控制方法,它通过模糊规则将人类的经验知识转化为控制策略。模糊控制的核心是模糊推理,包括以下几个步骤:
-
模糊化:将输入的精确值转换为模糊值。
-
模糊规则库:定义一系列模糊规则,描述输入与输出之间的关系。
-
模糊推理:根据输入的模糊值和模糊规则进行推理。
-
去模糊化:将模糊推理的结果转换为精确的输出值。
2.3 模糊PID控制的结合
模糊PID控制通过模糊推理动态调整PID参数(Kp、Ki 和 Kd),使得控制器能够根据系统的实时状态自动优化参数。具体来说,模糊PID控制器将误差 e(t) 和误差变化率 Δe(t) 作为输入,通过模糊规则调整PID参数,从而实现对复杂系统的有效控制。
3. 模糊PID控制器的实现步骤
3.1 定义模糊变量
模糊变量是模糊控制的基础,通常包括输入变量和输出变量。在模糊PID控制中:
-
输入变量:误差 e(t) 和误差变化率 Δe(t)。
-
输出变量:PID参数的增量 ΔKp、ΔKi 和 ΔKd。
每个模糊变量需要定义其模糊集合(如“负大”、“负小”、“零”、“正小”、“正大”)以及对应的隶属函数。

3.2 建立模糊规则库
模糊规则库是模糊控制器的核心,它描述了输入与输出之间的关系。例如:
-
如果误差 e(t) 是“正大”且误差变化率 Δe(t) 是“正大”,则 ΔKp 是“正大”。
-
如果误差 e(t) 是“零”且误差变化率 Δe(t) 是“零”,则 ΔKp 是“零”。
3.3 模糊推理与去模糊化
模糊推理根据输入的模糊值和模糊规则进行推理,得到输出的模糊值。去模糊化则将模糊值转换为精确值,常用的方法包括重心法、最大隶属度法等。
3.4 更新PID参数
根据模糊推理的结果,动态调整PID参数:

4. Python实现模糊PID控制器
4.1 安装必要的库
在实现模糊PID控制器之前,需要安装 skfuzzy 库,这是一个用于模糊逻辑的Python库。
pip install scikit-fuzzy numpy matplotlib4.2 定义模糊变量和隶属函数
import numpy as np
import skfuzzy as fuzz
from skfuzzy import control as ctrl
# 定义输入变量
e = ctrl.Antecedent(np.arange(-10, 11, 1), 'error')
de = ctrl.Antecedent(np.arange(-10, 11, 1), 'delta_error')
# 定义输出变量
kp = ctrl.Consequent(np.arange(0, 21, 1), 'kp')
ki = ctrl.Consequent(np.arange(0, 21, 1), 'ki')
kd = ctrl.Consequent(np.arange(0, 21, 1), 'kd')
# 定义模糊集合
e.automf(names=['nb', 'ns', 'ze', 'ps', 'pb'])
de.automf(names=['nb', 'ns', 'ze', 'ps', 'pb'])
kp.automf(names=['nb', 'ns', 'ze', 'ps', 'pb'])
ki.automf(names=['nb', 'ns', 'ze', 'ps', 'pb'])
kd.automf(names=['nb', 'ns', 'ze', 'ps', 'pb'])
# 绘制隶属函数
e.view()
de.view()
kp.view()
ki.view()
kd.view()4.3 建立模糊规则库
# 定义模糊规则
rules = []
# Kp的模糊规则
rules.append(ctrl.Rule(e['nb'] & de['nb'], kp['nb']))
rules.append(ctrl.Rule(e['nb'] & de['ns'], kp['nb']))
rules.append(ctrl.Rule(e['nb'] & de['ze'], kp['ns']))
rules.append(ctrl.Rule(e['nb'] & de['ps'], kp['ze']))
rules.append(ctrl.Rule(e['nb'] & de['pb'], kp['ps']))
rules.append(ctrl.Rule(e['ns'] & de['nb'], kp['nb']))
rules.append(ctrl.Rule(e['ns'] & de['ns'], kp['ns']))
rules.append(ctrl.Rule(e['ns'] & de['ze'], kp['ze']))
rules.append(ctrl.Rule(e['ns'] & de['ps'], kp['ps']))
rules.append(ctrl.Rule(e['ns'] & de['pb'], kp['pb']))
rules.append(ctrl.Rule(e['ze'] & de['nb'], kp['ns']))
rules.append(ctrl.Rule(e['ze'] & de['ns'], kp['ze']))
rules.append(ctrl.Rule(e['ze'] & de['ze'], kp['ze']))
rules.append(ctrl.Rule(e['ze'] & de['ps'], kp['ze']))
rules.append(ctrl.Rule(e['ze'] & de['pb'], kp['ps']))
rules.append(ctrl.Rule(e['ps'] & de['nb'], kp['nb']))
rules.append(ctrl.Rule(e['ps'] & de['ns'], kp['ns']))
rules.append(ctrl.Rule(e['ps'] & de['ze'], kp['ze']))
rules.append(ctrl.Rule(e['ps'] & de['ps'], kp['ps']))
rules.append(ctrl.Rule(e['ps'] & de['pb'], kp['pb']))
rules.append(ctrl.Rule(e['pb'] & de['nb'], kp['nb']))
rules.append(ctrl.Rule(e['pb'] & de['ns'], kp['ns']))
rules.append(ctrl.Rule(e['pb'] & de['ze'], kp['ze']))
rules.append(ctrl.Rule(e['pb'] & de['ps'], kp['ps']))
rules.append(ctrl.Rule(e['pb'] & de['pb'], kp['pb']))
# Ki的模糊规则
rules.append(ctrl.Rule(e['nb'] & de['nb'], ki['nb']))
rules.append(ctrl.Rule(e['nb'] & de['ns'], ki['nb']))
rules.append(ctrl.Rule(e['nb'] & de['ze'], ki['ns']))
rules.append(ctrl.Rule(e['nb'] & de['ps'], ki['ze']))
rules.append(ctrl.Rule(e['nb'] & de['pb'], ki['ps']))
rules.append(ctrl.Rule(e['ns'] & de['nb'], ki['nb']))
rules.append(ctrl.Rule(e['ns'] & de['ns'], ki['ns']))
rules.append(ctrl.Rule(e['ns'] & de['ze'], ki['ze']))
rules.append(ctrl.Rule(e['ns'] & de['ps'], ki['ps']))
rules.append(ctrl.Rule(e['ns'] & de['pb'], ki['pb']))
rules.append(ctrl.Rule(e['ze'] & de['nb'], ki['ns']))
rules.append(ctrl.Rule(e['ze'] & de['ns'], ki['ze']))
rules.append(ctrl.Rule(e['ze'] & de['ze'], ki['ze']))
rules.append(ctrl.Rule(e['ze'] & de['ps'], ki['ze']))
rules.append(ctrl.Rule(e['ze'] & de['pb'], ki['ps']))
rules.append(ctrl.Rule(e['ps'] & de['nb'], ki['nb']))
rules.append(ctrl.Rule(e['ps'] & de['ns'], ki['ns']))
rules.append(ctrl.Rule(e['ps'] & de['ze'], ki['ze']))
rules.append(ctrl.Rule(e['ps'] & de['ps'], ki['ps']))
rules.append(ctrl.Rule(e['ps'] & de['pb'], ki['pb']))
rules.append(ctrl.Rule(e['pb'] & de['nb'], ki['nb']))
rules.append(ctrl.Rule(e['pb'] & de['ns'], ki['ns']))
rules.append(ctrl.Rule(e['pb'] & de['ze'], ki['ze']))
rules.append(ctrl.Rule(e['pb'] & de['ps'], ki['ps']))
rules.append(ctrl.Rule(e['pb'] & de['pb'], ki['pb']))
# Kd的模糊规则
rules.append(ctrl.Rule(e['nb'] & de['nb'], kd['nb']))
rules.append(ctrl.Rule(e['nb'] & de['ns'], kd['nb']))
rules.append(ctrl.Rule(e['nb'] & de['ze'], kd['ns']))
rules.append(ctrl.Rule(e['nb'] & de['ps'], kd['ze']))
rules.append(ctrl.Rule(e['nb'] & de['pb'], kd['ps']))
rules.append(ctrl.Rule(e['ns'] & de['nb'], kd['nb']))
rules.append(ctrl.Rule(e['ns'] & de['ns'], kd['ns']))
rules.append(ctrl.Rule(e['ns'] & de['ze'], kd['ze']))
rules.append(ctrl.Rule(e['ns'] & de['ps'], kd['ps']))
rules.append(ctrl.Rule(e['ns'] & de['pb'], kd['pb']))
rules.append(ctrl.Rule(e['ze'] & de['nb'], kd['ns']))
rules.append(ctrl.Rule(e['ze'] & de['ns'], kd['ze']))
rules.append(ctrl.Rule(e['ze'] & de['ze'], kd['ze']))
rules.append(ctrl.Rule(e['ze'] & de['ps'], kd['ze']))
rules.append(ctrl.Rule(e['ze'] & de['pb'], kd['ps']))
rules.append(ctrl.Rule(e['ps'] & de['nb'], kd['nb']))
rules.append(ctrl.Rule(e['ps'] & de['ns'], kd['ns']))
rules.append(ctrl.Rule(e['ps'] & de['ze'], kd['ze']))
rules.append(ctrl.Rule(e['ps'] & de['ps'], kd['ps']))
rules.append(ctrl.Rule(e['ps'] & de['pb'], kd['pb']))
rules.append(ctrl.Rule(e['pb'] & de['nb'], kd['nb']))
rules.append(ctrl.Rule(e['pb'] & de['ns'], kd['ns']))
rules.append(ctrl.Rule(e['pb'] & de['ze'], kd['ze']))
rules.append(ctrl.Rule(e['pb'] & de['ps'], kd['ps']))
rules.append(ctrl.Rule(e['pb'] & de['pb'], kd['pb']))4.4 创建模糊控制系统的模拟器(简单示例:比例项)
# 创建模糊控制系统
kp_ctrl = ctrl.ControlSystem(rules)
kp_system = ctrl.ControlSystemSimulation(kp_ctrl)
# 设置输入值
kp_system.input['error'] = 5
kp_system.input['delta_error'] = 3
# 进行模糊推理
kp_system.compute()
# 输出结果
print(f"Kp: {kp_system.output['kp']}")
kp.view(sim=kp_system)以上就是使用模糊推理的手段的基本示例。
4.5 模糊PID控制器的完整代码(还是以温度控制为例)
import numpy as np
import skfuzzy as fuzz
from skfuzzy import control as ctrl
import matplotlib.pyplot as plt
class FuzzyPIDController:
def __init__(self, kp_range=(0, 1), ki_range=(0, 0.2), kd_range=(0, 0.1)):
# 初始化模糊变量
self.e = ctrl.Antecedent(np.arange(-70, 71, 2), 'error')
self.de = ctrl.Antecedent(np.arange(-10, 11, 1), 'delta_error')
self.kp = ctrl.Consequent(np.arange(kp_range[0], kp_range[1] + 1, 0.1), 'kp')
self.ki = ctrl.Consequent(np.arange(ki_range[0], ki_range[1] + 1, 0.02), 'ki')
self.kd = ctrl.Consequent(np.arange(kd_range[0], kd_range[1] + 1, 0.01), 'kd')
# 定义模糊集合
self.e.automf(names=['nb', 'ns', 'ze', 'ps', 'pb'])
self.de.automf(names=['nb', 'ns', 'ze', 'ps', 'pb'])
self.kp.automf(names=['nb', 'ns', 'ze', 'ps', 'pb'])
self.ki.automf(names=['nb', 'ns', 'ze', 'ps', 'pb'])
self.kd.automf(names=['nb', 'ns', 'ze', 'ps', 'pb'])
# 创建模糊规则库
self.rules = self._create_rules()
# 创建模糊控制系统
self.ctrl_system = ctrl.ControlSystem(self.rules)
self.simulator = ctrl.ControlSystemSimulation(self.ctrl_system)
# 初始化PID参数
self.kp_value = 0.5
self.ki_value = 0.1
self.kd_value = 0.05
self.prev_error = 0.0
self.integral = 0.0
def _create_rules(self):
rules = []
# Kp的模糊规则
rules.append(ctrl.Rule(self.e['nb'] & self.de['nb'], self.kp['nb']))
rules.append(ctrl.Rule(self.e['nb'] & self.de['ns'], self.kp['nb']))
rules.append(ctrl.Rule(self.e['nb'] & self.de['ze'], self.kp['ns']))
rules.append(ctrl.Rule(self.e['nb'] & self.de['ps'], self.kp['ze']))
rules.append(ctrl.Rule(self.e['nb'] & self.de['pb'], self.kp['ps']))
rules.append(ctrl.Rule(self.e['ns'] & self.de['nb'], self.kp['nb']))
rules.append(ctrl.Rule(self.e['ns'] & self.de['ns'], self.kp['ns']))
rules.append(ctrl.Rule(self.e['ns'] & self.de['ze'], self.kp['ze']))
rules.append(ctrl.Rule(self.e['ns'] & self.de['ps'], self.kp['ps']))
rules.append(ctrl.Rule(self.e['ns'] & self.de['pb'], self.kp['pb']))
rules.append(ctrl.Rule(self.e['ze'] & self.de['nb'], self.kp['ns']))
rules.append(ctrl.Rule(self.e['ze'] & self.de['ns'], self.kp['ze']))
rules.append(ctrl.Rule(self.e['ze'] & self.de['ze'], self.kp['ze']))
rules.append(ctrl.Rule(self.e['ze'] & self.de['ps'], self.kp['ze']))
rules.append(ctrl.Rule(self.e['ze'] & self.de['pb'], self.kp['ps']))
rules.append(ctrl.Rule(self.e['ps'] & self.de['nb'], self.kp['nb']))
rules.append(ctrl.Rule(self.e['ps'] & self.de['ns'], self.kp['ns']))
rules.append(ctrl.Rule(self.e['ps'] & self.de['ze'], self.kp['ze']))
rules.append(ctrl.Rule(self.e['ps'] & self.de['ps'], self.kp['ps']))
rules.append(ctrl.Rule(self.e['ps'] & self.de['pb'], self.kp['pb']))
rules.append(ctrl.Rule(self.e['pb'] & self.de['nb'], self.kp['nb']))
rules.append(ctrl.Rule(self.e['pb'] & self.de['ns'], self.kp['ns']))
rules.append(ctrl.Rule(self.e['pb'] & self.de['ze'], self.kp['ze']))
rules.append(ctrl.Rule(self.e['pb'] & self.de['ps'], self.kp['ps']))
rules.append(ctrl.Rule(self.e['pb'] & self.de['pb'], self.kp['pb']))
# Ki的模糊规则
rules.append(ctrl.Rule(self.e['nb'] & self.de['nb'], self.ki['nb']))
rules.append(ctrl.Rule(self.e['nb'] & self.de['ns'], self.ki['nb']))
rules.append(ctrl.Rule(self.e['nb'] & self.de['ze'], self.ki['ns']))
rules.append(ctrl.Rule(self.e['nb'] & self.de['ps'], self.ki['ze']))
rules.append(ctrl.Rule(self.e['nb'] & self.de['pb'], self.ki['ps']))
rules.append(ctrl.Rule(self.e['ns'] & self.de['nb'], self.ki['nb']))
rules.append(ctrl.Rule(self.e['ns'] & self.de['ns'], self.ki['ns']))
rules.append(ctrl.Rule(self.e['ns'] & self.de['ze'], self.ki['ze']))
rules.append(ctrl.Rule(self.e['ns'] & self.de['ps'], self.ki['ps']))
rules.append(ctrl.Rule(self.e['ns'] & self.de['pb'], self.ki['pb']))
rules.append(ctrl.Rule(self.e['ze'] & self.de['nb'], self.ki['ns']))
rules.append(ctrl.Rule(self.e['ze'] & self.de['ns'], self.ki['ze']))
rules.append(ctrl.Rule(self.e['ze'] & self.de['ze'], self.ki['ze']))
rules.append(ctrl.Rule(self.e['ze'] & self.de['ps'], self.ki['ze']))
rules.append(ctrl.Rule(self.e['ze'] & self.de['pb'], self.ki['ps']))
rules.append(ctrl.Rule(self.e['ps'] & self.de['nb'], self.ki['nb']))
rules.append(ctrl.Rule(self.e['ps'] & self.de['ns'], self.ki['ns']))
rules.append(ctrl.Rule(self.e['ps'] & self.de['ze'], self.ki['ze']))
rules.append(ctrl.Rule(self.e['ps'] & self.de['ps'], self.ki['ps']))
rules.append(ctrl.Rule(self.e['ps'] & self.de['pb'], self.ki['pb']))
rules.append(ctrl.Rule(self.e['pb'] & self.de['nb'], self.ki['nb']))
rules.append(ctrl.Rule(self.e['pb'] & self.de['ns'], self.ki['ns']))
rules.append(ctrl.Rule(self.e['pb'] & self.de['ze'], self.ki['ze']))
rules.append(ctrl.Rule(self.e['pb'] & self.de['ps'], self.ki['ps']))
rules.append(ctrl.Rule(self.e['pb'] & self.de['pb'], self.ki['pb']))
# Kd的模糊规则
rules.append(ctrl.Rule(self.e['nb'] & self.de['nb'], self.kd['nb']))
rules.append(ctrl.Rule(self.e['nb'] & self.de['ns'], self.kd['nb']))
rules.append(ctrl.Rule(self.e['nb'] & self.de['ze'], self.kd['ns']))
rules.append(ctrl.Rule(self.e['nb'] & self.de['ps'], self.kd['ze']))
rules.append(ctrl.Rule(self.e['nb'] & self.de['pb'], self.kd['ps']))
rules.append(ctrl.Rule(self.e['ns'] & self.de['nb'], self.kd['nb']))
rules.append(ctrl.Rule(self.e['ns'] & self.de['ns'], self.kd['ns']))
rules.append(ctrl.Rule(self.e['ns'] & self.de['ze'], self.kd['ze']))
rules.append(ctrl.Rule(self.e['ns'] & self.de['ps'], self.kd['ps']))
rules.append(ctrl.Rule(self.e['ns'] & self.de['pb'], self.kd['pb']))
rules.append(ctrl.Rule(self.e['ze'] & self.de['nb'], self.kd['ns']))
rules.append(ctrl.Rule(self.e['ze'] & self.de['ns'], self.kd['ze']))
rules.append(ctrl.Rule(self.e['ze'] & self.de['ze'], self.kd['ze']))
rules.append(ctrl.Rule(self.e['ze'] & self.de['ps'], self.kd['ze']))
rules.append(ctrl.Rule(self.e['ze'] & self.de['pb'], self.kd['ps']))
rules.append(ctrl.Rule(self.e['ps'] & self.de['nb'], self.kd['nb']))
rules.append(ctrl.Rule(self.e['ps'] & self.de['ns'], self.kd['ns']))
rules.append(ctrl.Rule(self.e['ps'] & self.de['ze'], self.kd['ze']))
rules.append(ctrl.Rule(self.e['ps'] & self.de['ps'], self.kd['ps']))
rules.append(ctrl.Rule(self.e['ps'] & self.de['pb'], self.kd['pb']))
rules.append(ctrl.Rule(self.e['pb'] & self.de['nb'], self.kd['nb']))
rules.append(ctrl.Rule(self.e['pb'] & self.de['ns'], self.kd['ns']))
rules.append(ctrl.Rule(self.e['pb'] & self.de['ze'], self.kd['ze']))
rules.append(ctrl.Rule(self.e['pb'] & self.de['ps'], self.kd['ps']))
rules.append(ctrl.Rule(self.e['pb'] & self.de['pb'], self.kd['pb']))
return rules
def compute(self, error):
# 计算误差变化率
delta_error = error - self.prev_error
self.prev_error = error
# 设置输入值
self.simulator.input['error'] = error
self.simulator.input['delta_error'] = delta_error
# 进行模糊推理
self.simulator.compute()
# 更新PID参数
self.kp_value = self.simulator.output['kp']
self.ki_value = self.simulator.output['ki']
self.kd_value = self.simulator.output['kd']
# 限制积分项以避免积分饱和
self.integral += error
if self.integral > 100:
self.integral = 100
elif self.integral < -100:
self.integral = -100
# 计算PID控制输出
self.integral += error
output = self.kp_value * error + self.ki_value * self.integral + self.kd_value * delta_error
return output
def temperature_system(current_temp, control, K=0.1, alpha=0.05):
return current_temp + K * (control - alpha * current_temp)
# 测试模糊PID控制器
if __name__ == "__main__":
# 创建模糊PID控制器
controller = FuzzyPIDController()
# 模拟控制过程
target_value = 70.0
current_value = 0.0
history = []
for _ in range(200):
error = target_value - current_value
control_signal = controller.compute(error)
current_value=temperature_system(current_value,control_signal)
history.append(current_value)
# 绘制控制过程
plt.plot(history)
plt.axhline(y=target_value, color='r', linestyle='--')
plt.xlabel('Time')
plt.ylabel('Value')
plt.title('Fuzzy PID Control')
plt.show()
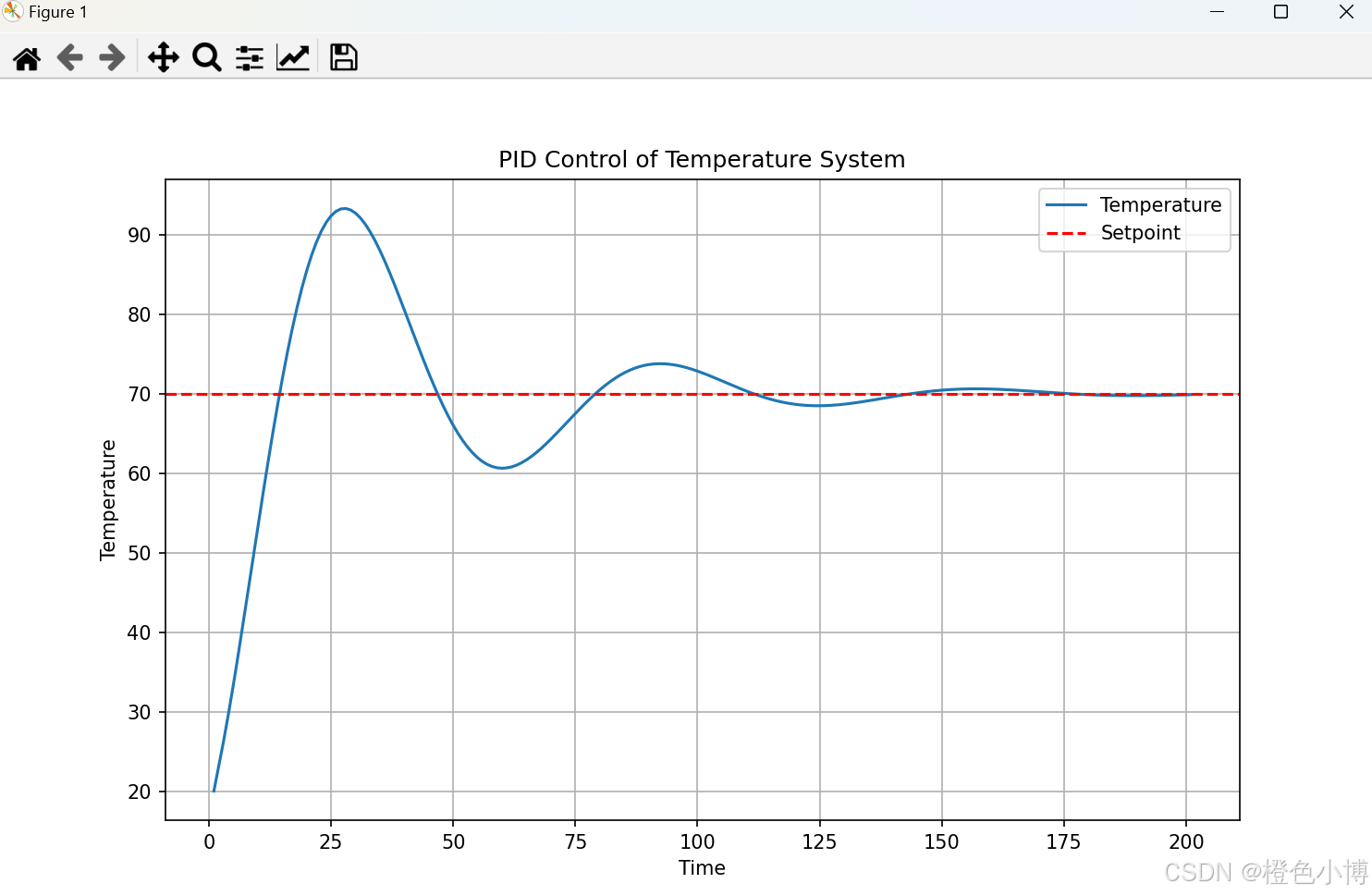
4.6 运行结果比对
普通PID控制:
模糊PID控制:
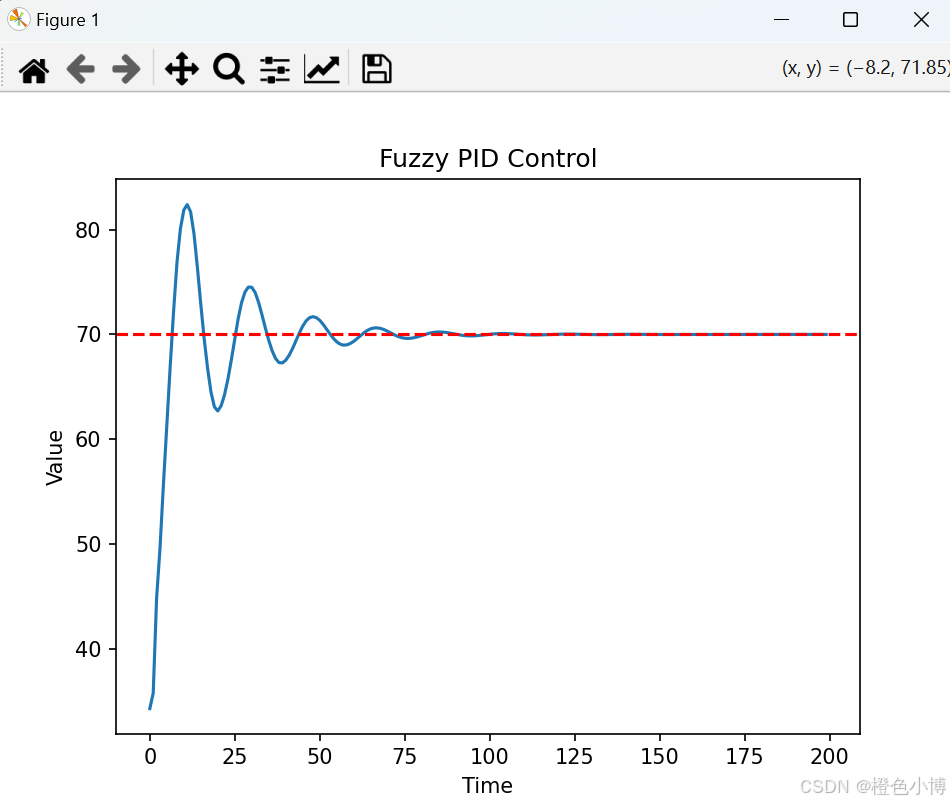
可以看到效果的确好很多!
5. 总结
模糊PID控制结合了模糊逻辑和传统PID控制的优点,能够动态调整PID参数,适应复杂系统的控制需求。通过本文的介绍和Python代码实现,读者可以了解模糊PID控制的基本原理和实现方法。在实际应用中,模糊PID控制可以广泛应用于工业过程控制、机器人控制等领域,为解决复杂控制问题提供了有效的解决方案。
希望本文能够帮助大家更好地理解和应用模糊PID控制技术!如果对模糊控制或PID控制有进一步的问题,欢迎在评论区交流讨论。我是橙色小博,关注我,一起在人工智能领域学习进步!


















 1470
1470

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











