






各种模糊控制算法案例word+程序+建模过程
Fuzzy controller
自动控制理论
控制理论与应用
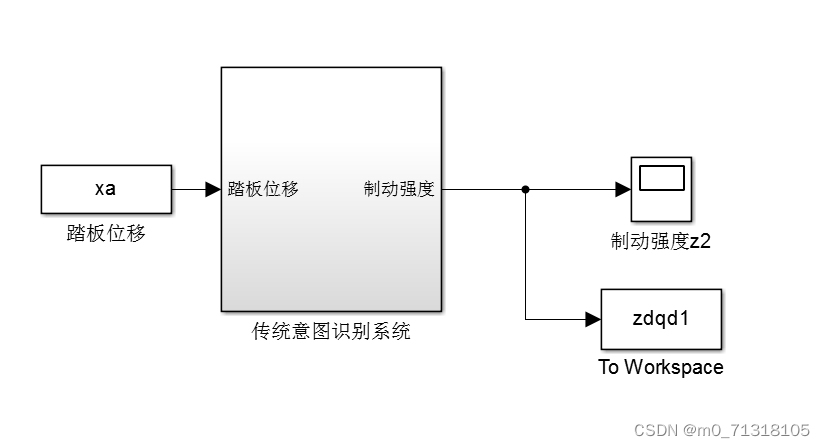
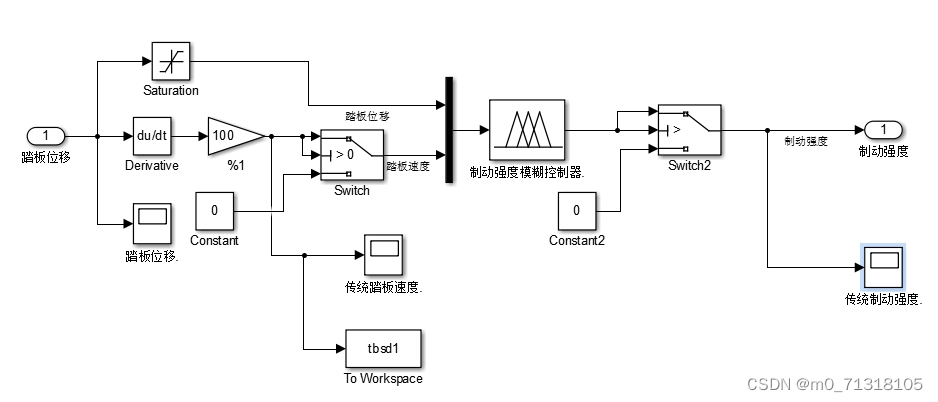
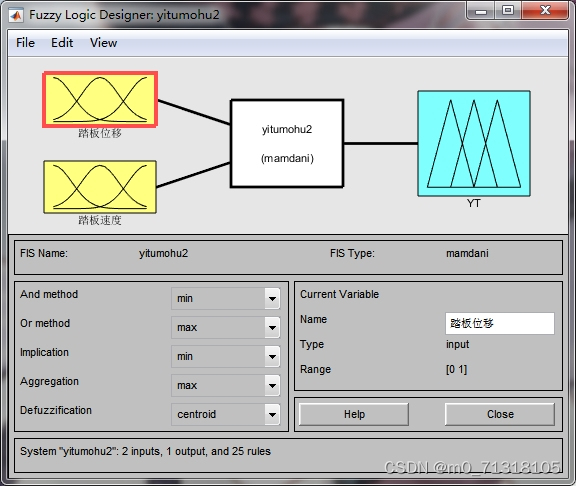
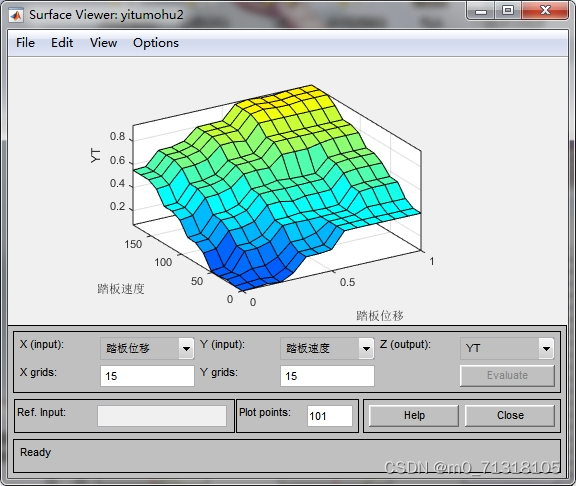
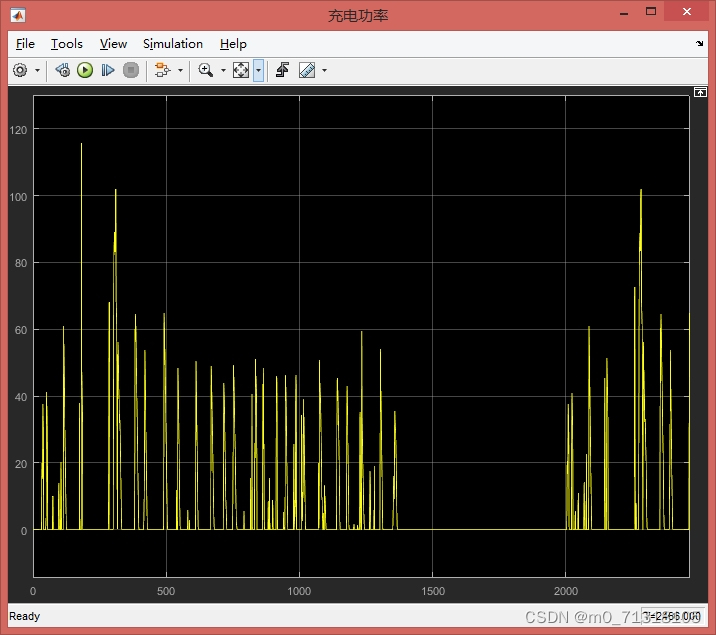
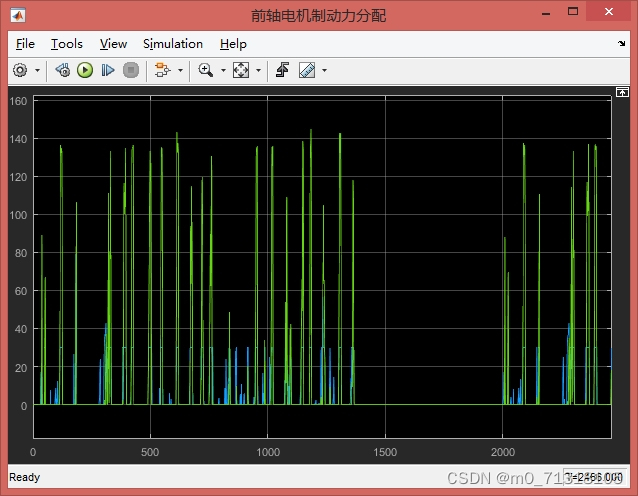
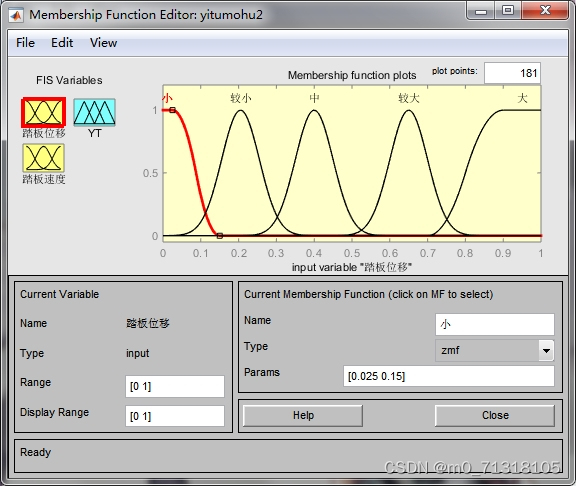
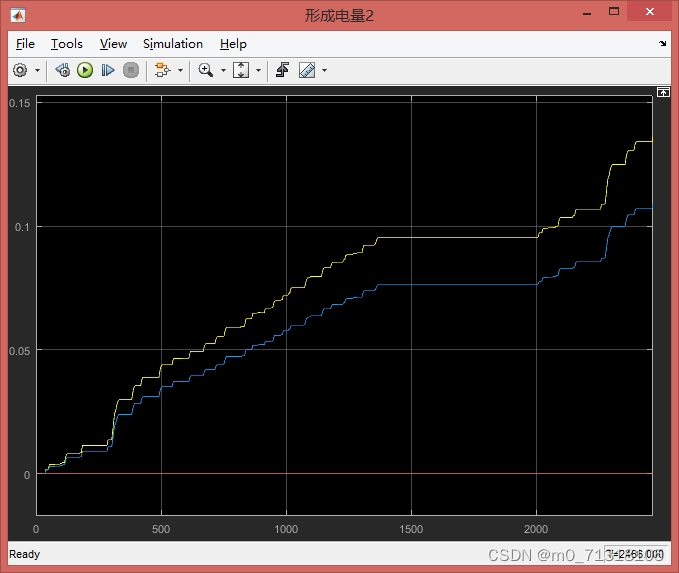
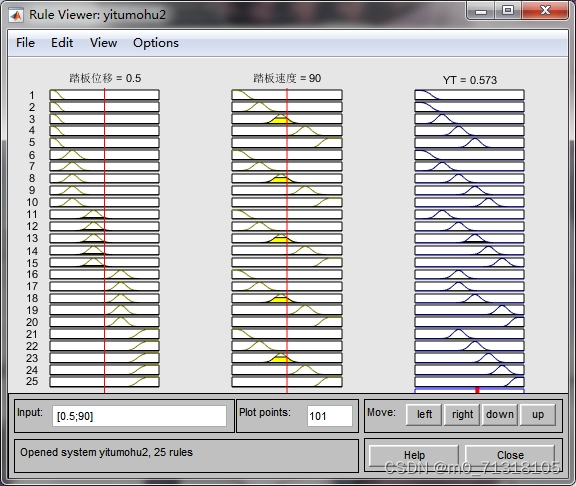
基于MATLAB /Simulink搭建驾驶员制动意图识别模型,基于踏板位移和踏板速度,利用模糊控制算法计算驾驶员制动意图,是一个很好的模糊控制算法得例子。
初学者必用!经典案例
 ID:6925
ID:6925 638736451800
638736451800
各种模糊控制算法案例word+程序+建模过程
Fuzzy controller
自动控制理论
控制理论与应用
基于MATLAB /Simulink搭建驾驶员制动意图识别模型,基于踏板位移和踏板速度,利用模糊控制算法计算驾驶员制动意图,是一个很好的模糊控制算法得例子。
初学者必用!经典案例
ID:6925638736451800











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



















 5838
5838





