









 本文介绍了如何在Python中使用matplotlib库创建极坐标雷达图,包括数据集准备(如k-means聚类后的标准化),划分角度,指定半径,以及如何绘制和个性化设置雷达图。
本文介绍了如何在Python中使用matplotlib库创建极坐标雷达图,包括数据集准备(如k-means聚类后的标准化),划分角度,指定半径,以及如何绘制和个性化设置雷达图。
目录
一、创建极坐标
Python中没有直接画雷达图的函数,若要绘制需要先创建画布和极坐标轴域,再设定角度与半径的参数(极坐标中角度与半径确定一个点的位置)
fig = plt.figure(figsize=[10, 6])
ax = plt.subplot(111, polar=True)
二、数据集准备
前期已由k-means聚类算法得到对应数据集 visualization_data,对其进行标准化数处理:
# 标准化
v_scaler= StandardScaler()
v_scaled= v_scaler.fit_transform(visualization_data.iloc[:5,:])
v_scaled=pd.DataFrame(v_scaled,index=visualization_data.index[:5],columns=visualization_data.columns)
v_scaled
标准化后待绘图的数据 v_scaled 如下:

三、划分角度
现在有五个属性,需要把 2π 划分为5分
# 划分角度
angles = np.linspace(0, 2 * np.pi, len(v_scaled), endpoint=False) # 极坐标的角度值根据数据属性数量进行等分
label_θ = np.concatenate((angles,[angles[0]]),axis=0)
print(label_θ)
print(angles)
# 有无concatenate的区别
[0. 1.25663706 2.51327412 3.76991118 5.02654825 0. ]
[0. 1.25663706 2.51327412 3.76991118 5.02654825]
(没有 concatenate 连接在绘制时会变成这样)
https://www.cnblogs.com/kallan/p/6738577.html
[angles[0]]无方括号会报错,因为进行的是数组间的连接,不能数组与整数之间这样连接
四、指定半径
# 值——即半径长度,以类别2为例
propvalue = v_scaled.iloc[:,1]
label_l=np.concatenate((propvalue,[propvalue[0]]))
print(propvalue)
print(label_l)
[Recency 1.819582
Frequency -0.864999
Monetary 0.263034
客单价 -0.353453
客单件 -0.864165
Name: 2, dtype: float64]
[ 1.81958224 -0.86499907 0.26303444 -0.35345253 -0.86416507 1.81958224]五、绘制
绘制雷达图,在极坐标下仍然使用plot(),参数是极坐标参数就可以了
### 以下代码需要在同一框内实现 ###
fig = plt.figure(figsize=(30,30)) # 创建画布
mpl.rcParams["font.sans-serif"] = ["SimHei"] # 中文
mpl.rcParams['axes.unicode_minus']=False # 负号
plt.subplots_adjust(hspace=0.4) # 设置一下子图之间的垂直距离
color=['green','springgreen','springgreen','lime','lime','g','g','lime','g'] # 指定颜色
for i in range(0,len(v_scaled.columns)): # 0开始循环绘制,数据集有9列
ax1 = fig.add_subplot(3,3,i+1,polar=True) # 定位到第i+1个axes
propvalue = v_scaled.iloc[:,i] # 第 i 列
label_l=np.concatenate((propvalue,[propvalue[0]])) # 连接
ax1.plot(label_θ, label_l,color='g',alpha=0.5 ) # plot的作用是画图并连线
ax1.fill(label_θ, label_l, color=color[i],alpha=1) # 填充,设置颜色和深浅
# 其他元素设置
# 设置雷达图中每一项的标签显示
ax1.set_thetagrids(angles*180/np.pi, v_labels,fontsize=25)
# 设置雷达图的0度起始位置
ax1.set_theta_zero_location('E')
# 设置雷达图的坐标刻度范围
ax1.set_rlim(-2.5, 2.5)
# 设置雷达图的坐标值显示角度,相对于起始角度的偏移量
# 设置标题
ax1.set_title('类别'+str(v_scaled.columns[i])+':'+str(labeled_data_rate.T.loc['数量',v_scaled.columns[i]])+'人',fontsize=35)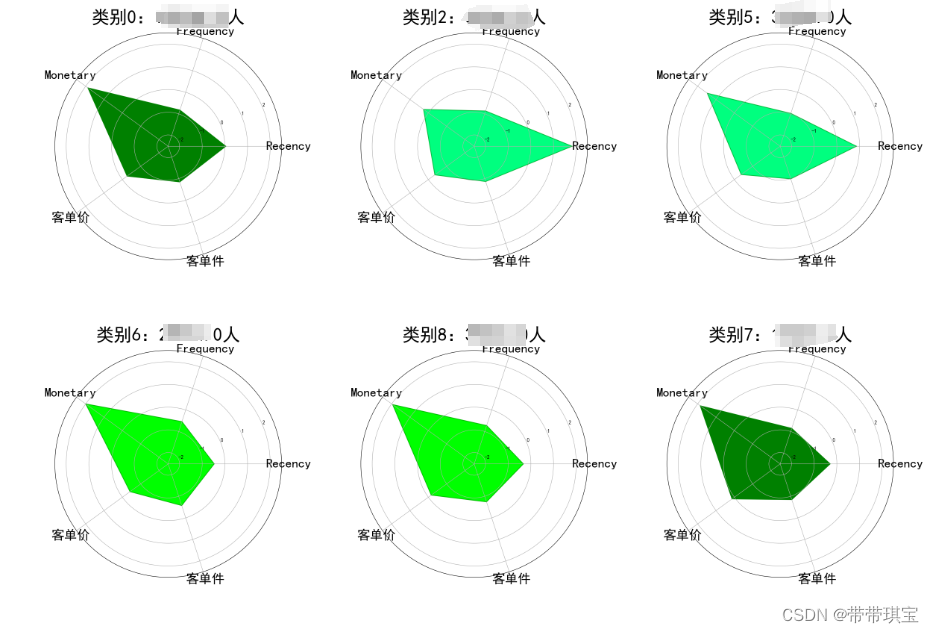
(部分图片)
















 4710
4710











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











