






常见问题
当在角度PID控制中处理角度差时,陀螺仪测量的角度范围通常是0到180度以及0到-180度。在计算角度偏差时,常常会使用目标角度减去当前角度,即误差(error)等于目标角度减去当前角度(error = Target_angle - Now_angle)。然而,在角度从正向180度跨越到负向-179度时,继续使用该计算公式会导致误差突变,从而影响控制的稳定性
解决方法
方法一:分类讨论
这里我们采用分类讨论的方法去解决该问题。
-
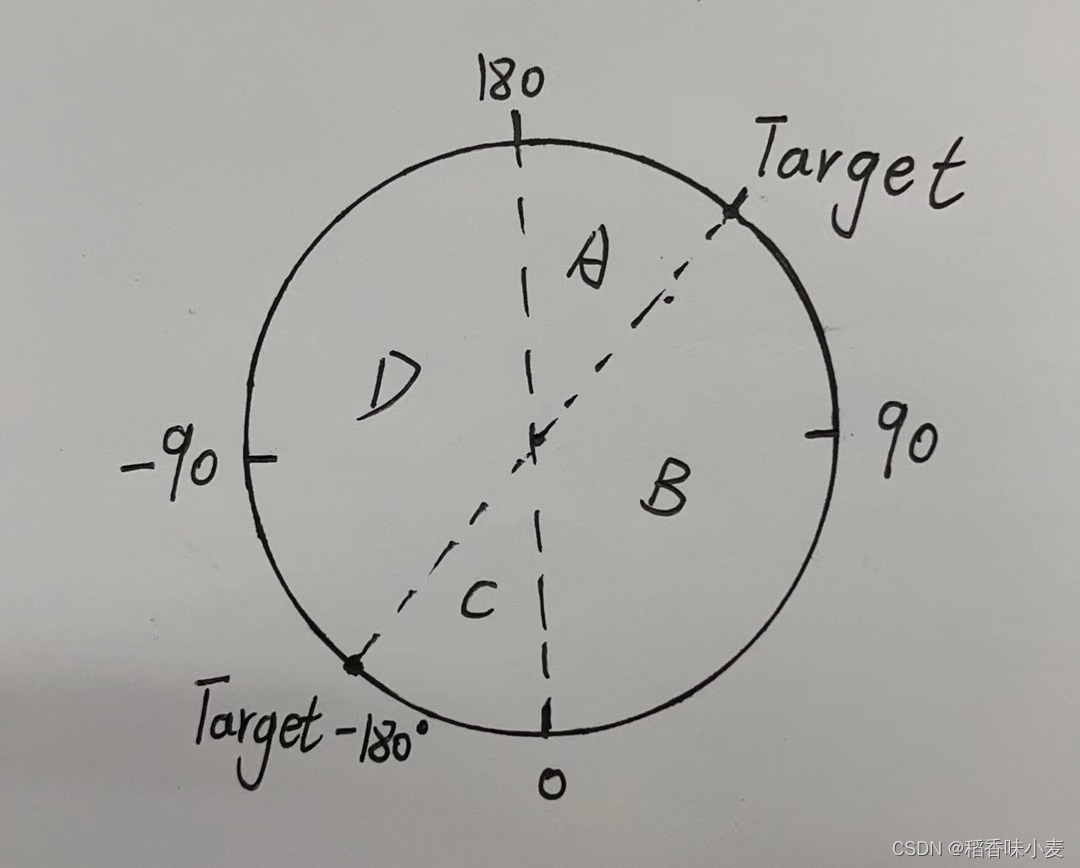
目标角度为正(Target > 0): 将角度范围划分为ABCD四个区域:
- 当前角度位于AB区域,即Now_Angle > 0时,偏差error = Target - Now_Angle
- 当前角度位于CD区域,即Now_Angle < 0时:
- 若Now_Angle位于C区域,即Now_Angle > Target - 180,偏差error = |Now_Angle| + Target
- 若Now_Angle位于D区域,即Now_Angle < Target - 180,偏差error = (Targht-180) - (180 + Now_Angle)
-
目标角度为负(Target < 0): 同样地,将角度范围划分为ABCD四个区域:
- 当前角度位于AB区域,即Now_Angle < 0时,偏差error = Target - Now_Angle
- 当前角度位于CD区域,即Now_Angle > 0时:
- 若Now_Angle位于C区域,即Now_Angle > Target + 180,偏差error = Now_Angle - (180 + Target)
- 若Now_Angle位于D区域,即Now_Angle < Target + 180,偏差error = Target - |Now_Angle|
在实际计算中,要确保明确正负方向,以正确应用分类讨论中的各种情况。这种方法应该能够帮助你处理陀螺仪角度在180度边界上的问题
注意计算时要标定好正方向
方法二:使用反正切函数
使用反正切函数(如atan2)来计算目标角度与当前角度的差值。这种方法会考虑角度的方向,因此不会在180度边界处产生不连续性。
方法三:角度归一化:
将角度映射到统一的范围,通常是-180度到+180度之间。当角度超过180度时,从角度中减去360度;当角度小于-180度时,从角度中加上360度,以确保角度保持在连续范围内。
代码实现
方法二和方法三代码就不贴出来了,个人觉得方法一简单方便,相比于方法二较简单,相对与方法三适合准确率更高。
float Yaw_error(float Target, float Now)
{
static float error;
if (Target > 0)
{
if (Now <= 0)
{
if (fabs(Now) < (180 - Target))
{
error = fabs(Now) + Target;
}
else
{
error = -(180 - Target) - (180 - fabs(Now));
}
}
else
{
if (Now > 0)
{
error = Target - Now;
}
}
}
else if (Target < 0)
{
if (Now > 0)
{
if (Now > Target + 180)
{
error = (180 - Now) + (180 - fabs(Target));
}
else if (Now < Target + 180)
{
error = -(fabs(Target) + Now);
}
}
else if (Now < 0)
{
error = -(fabs(Target) - fabs(Now));
}
}
return error;
}
float fabs(float value) {
if (value < 0)
{
return -value;
}
else
{
return value;
}
}
结语
上述问题常用于偏航角转过180度出现。如果如果上述有误,希望能点出,如果看不明白或者有问题可以加我QQ:2831194995一起讨论。

















 1435
1435

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









