






文章目录
前言
串口通信发送数据
一、串口通信介绍
1. 串口通信
串口通信是指外设和计算机间,通过数据信号线 、地线、控制线等,按位进行传输数据的一种通讯方式,如SPI通信、USART通信、EEPROM通信等。简单讲,串口通信实现了上位机(PC)与下位机(如STM32)之间的信息交互。
上位机(PC)通过串口调试助手等实现数据的接收和发送;
下位机(STM32)通过printf()、getchar()等函数实现字符或字符串的接收和发送。
2.STM32的串口通信接口
UART:通用异步收发器
USART:通用同步/异步收发器(两种模式可切换)
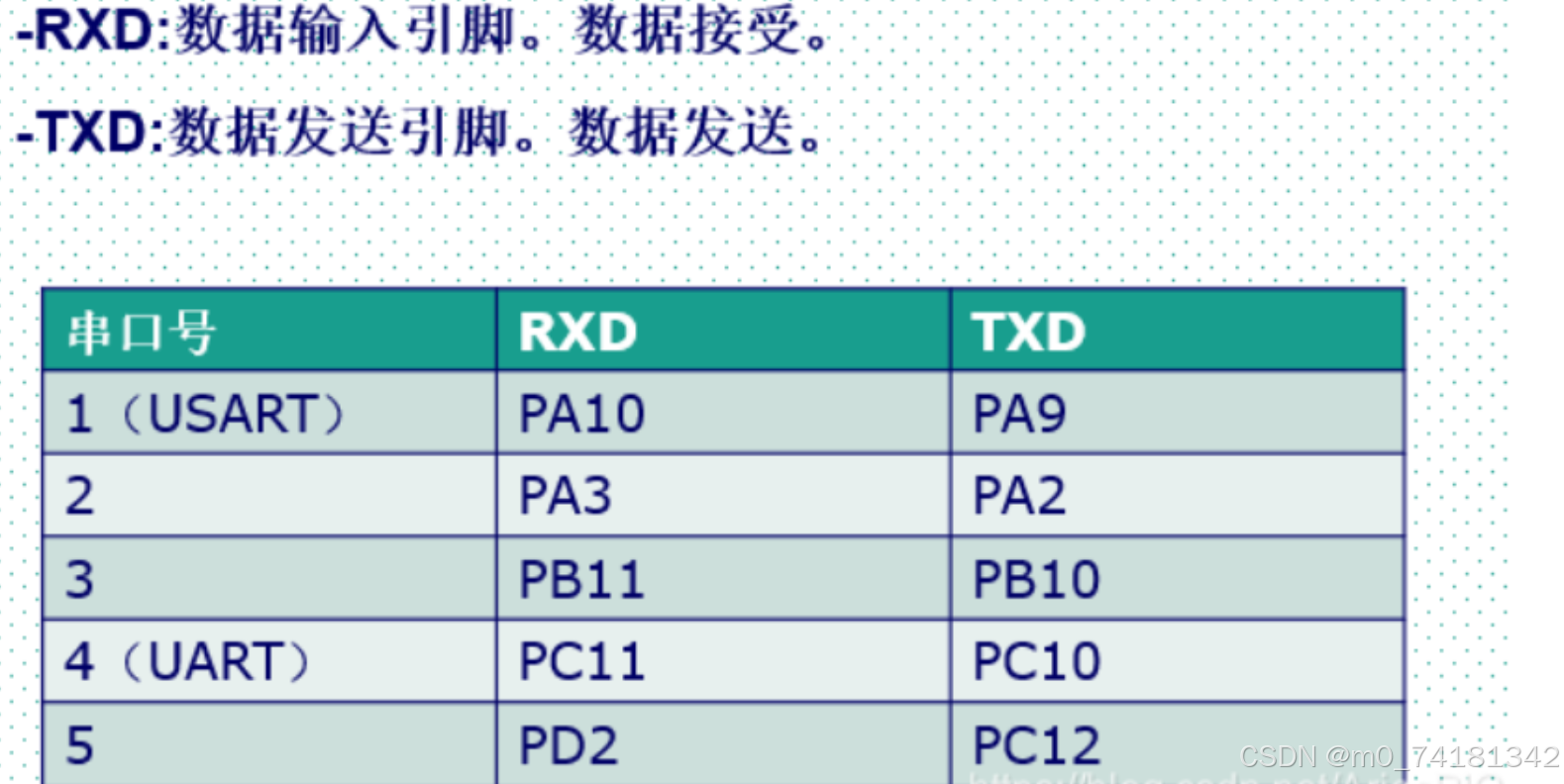
STM32F103系列提供5路串口,包含3个 USART 和2个 UART 。
串口的引脚如下图所示:
3.USART的使用步骤
串口设置的一般步骤可以总结为如下几个步骤:
1)串口时钟使能 GPIO 时钟使能
2)串口复位
3)GPIO 端口模式设置
4)串口参数初始化
5)开启中断 并且初始化 NVIC(如果需要开启中断才需要这个步骤)
6)使能串口
7)编写中断处理函数
二、准备工具
1、STM32开发板(我的是STM32F103C8Tx)
2、STM32CubeMx软件、 IDE: Keil5软件
3、STM32F1xxHAL库
4、串口: 使用USART1 PA9,PA10
三、通过STM32CubeMX配置项目
与https://editor.csdn.net/md/?articleId=144151601配置大致一样。
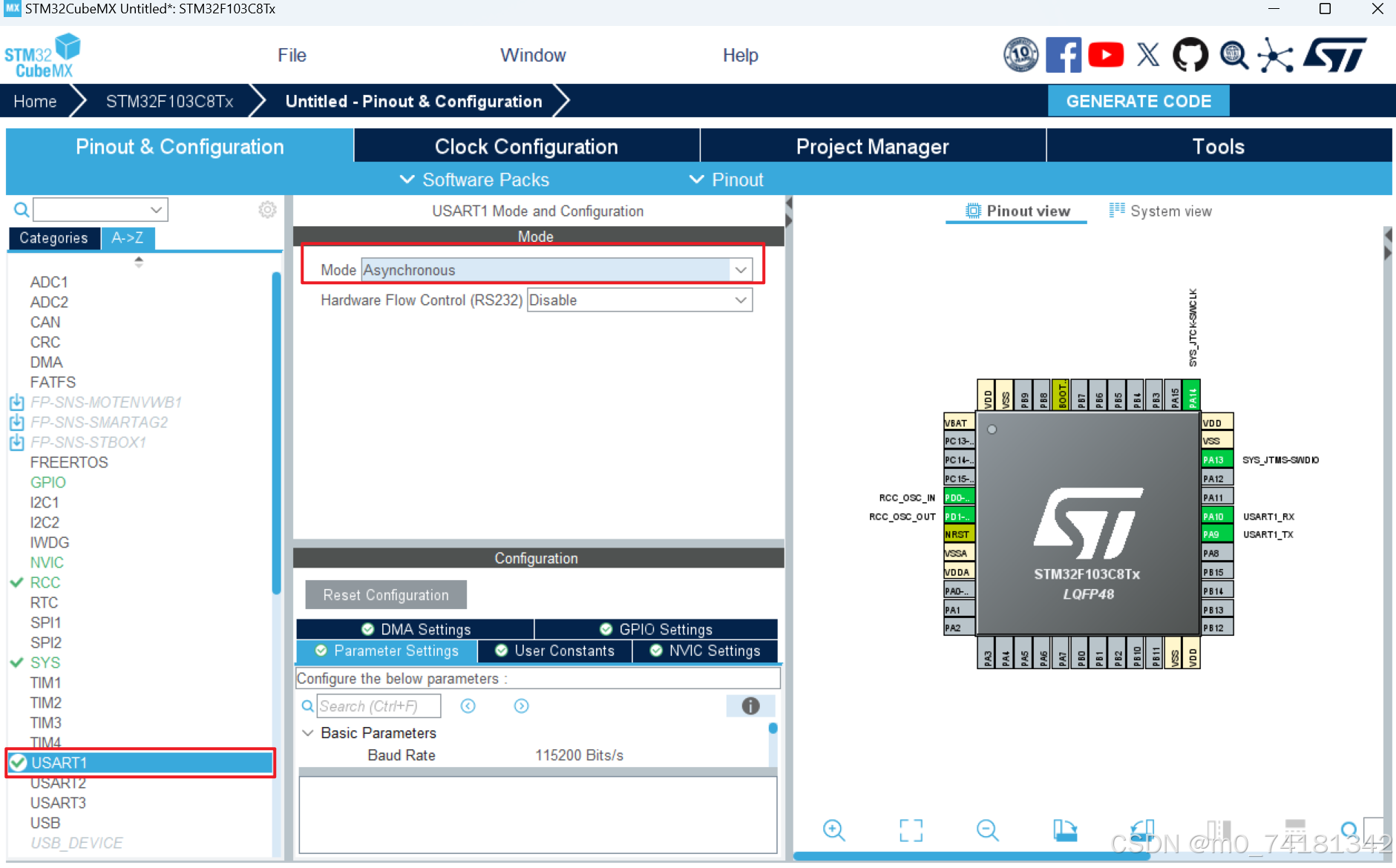
(1)选择串口USART1,设置MODE为异步通信(Asynchronous)
基础参数:波特率为115200 Bits/s。传输数据长度为8 Bit。奇偶检验无,停止位1 接收和发送都使能。
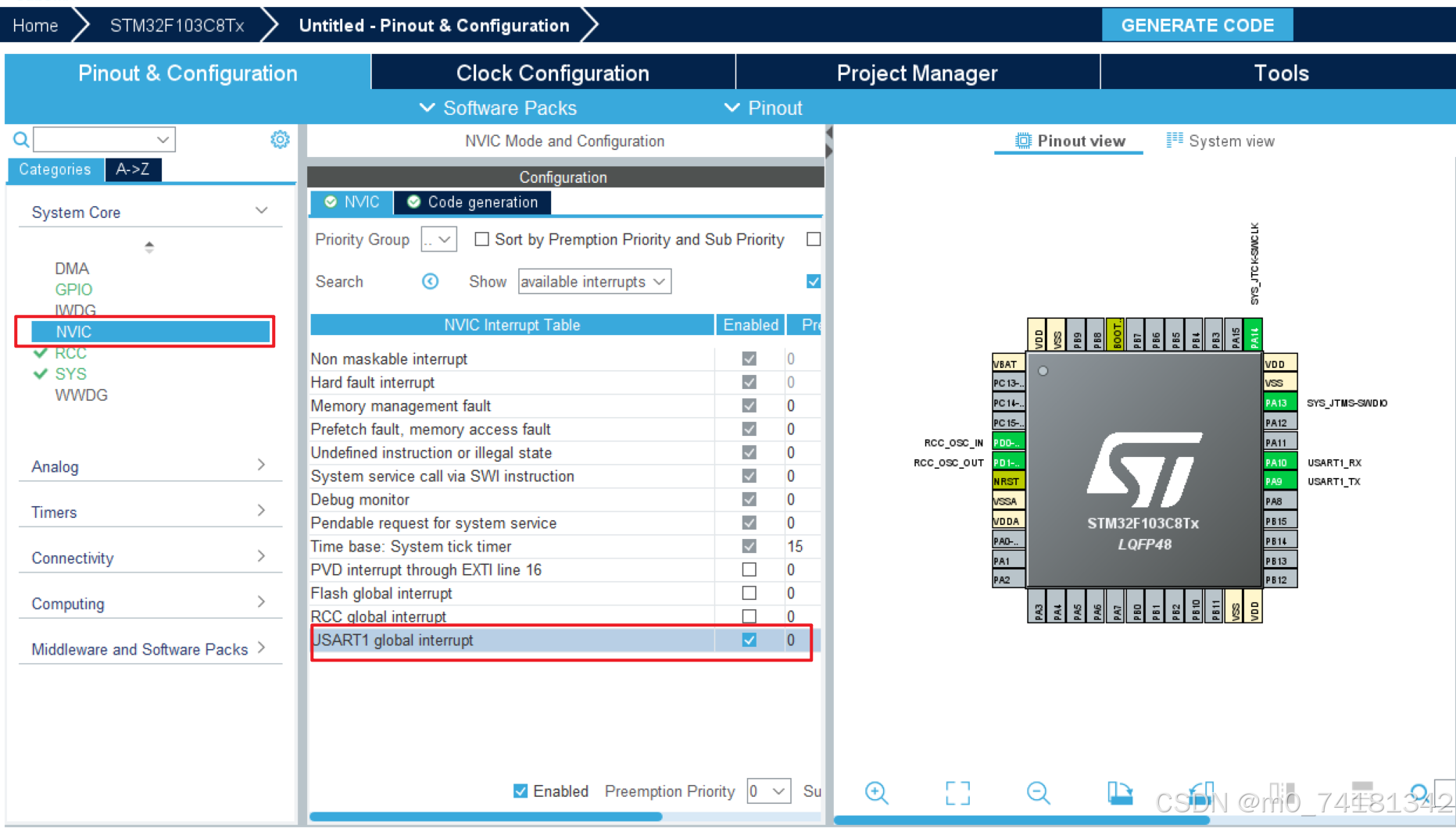
(2)设置NVIC使能接收中断
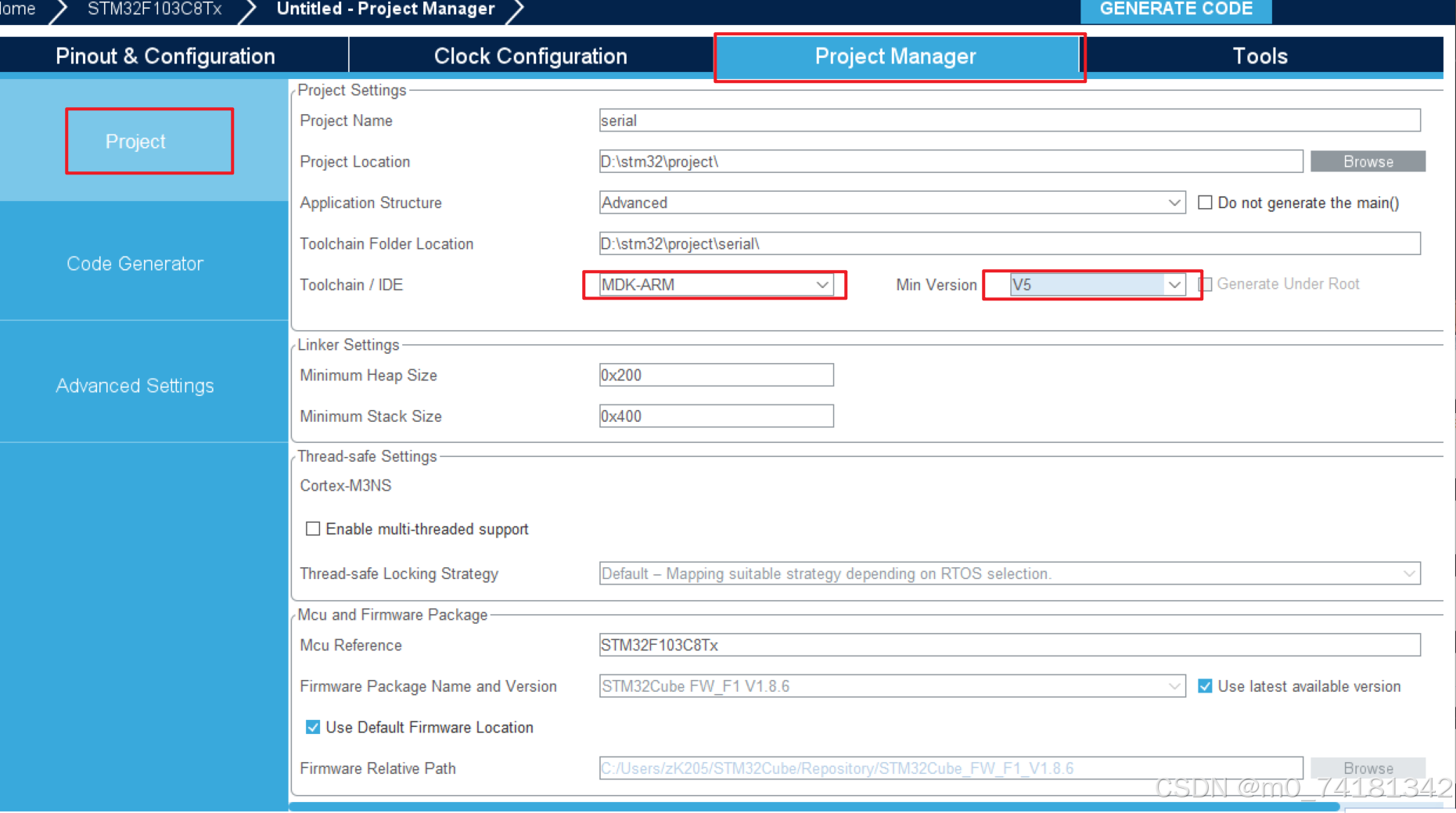
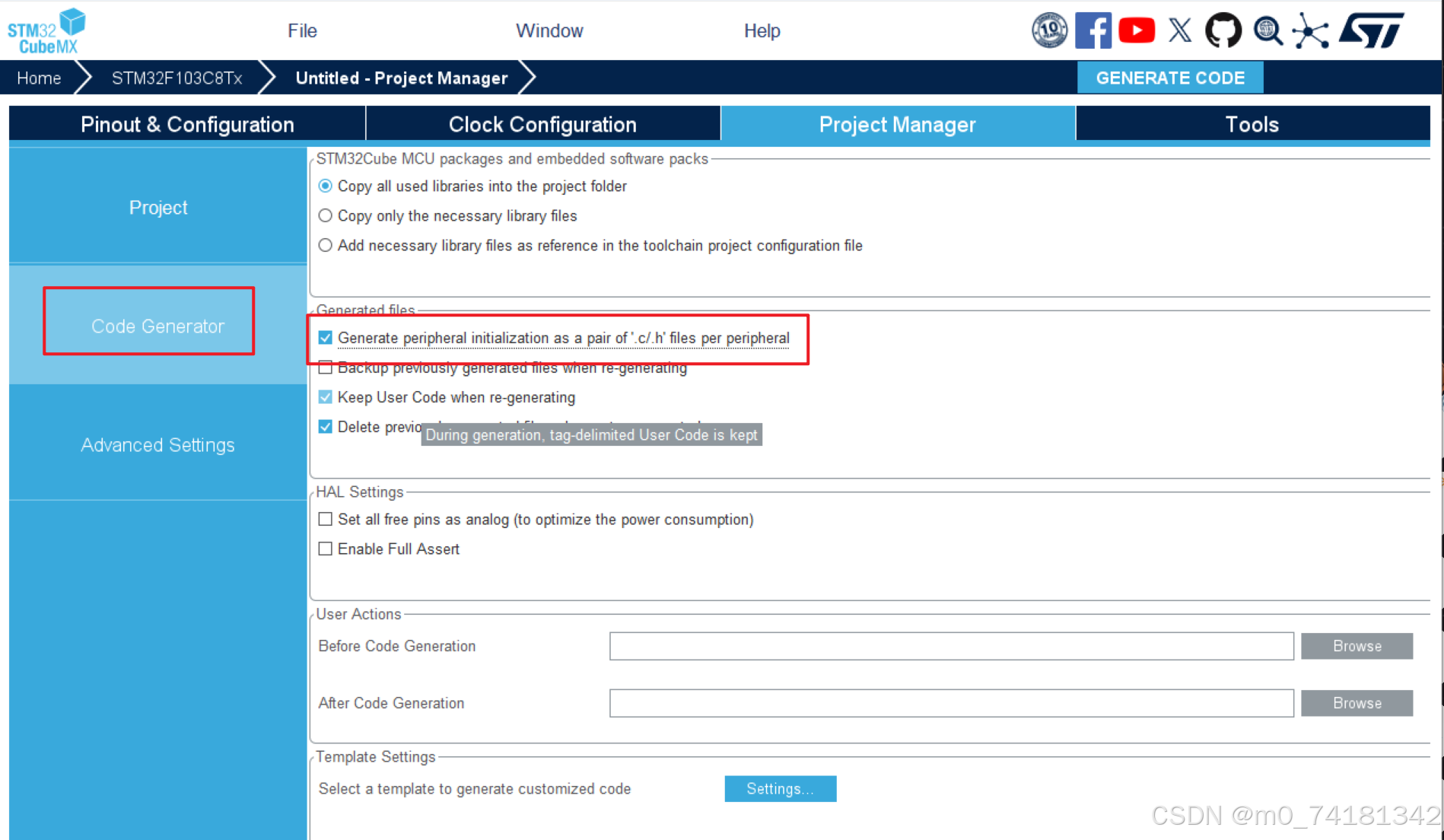
(3)设置项目名称,存储路径以及选择所用IDE,最后创建项目工程文件
四、HAL库USART函数库介绍
1.串口发送/接收函数
HAL_UART_Transmit():串口发送数据,使用超时管理机制;
HAL_UART_Receive():串口接收数据,使用超时管理机制;
HAL_UART_Transmit_IT():串口中断模式发送;
HAL_UART_Receive_IT():串口中断模式接收;
HAL_UART_Transmit_DMA():串口DMA模式发送;
HAL_UART_Transmit_DMA():串口DMA模式接收;
1.1.串口发送数据函数
函数说明:
HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
功能:
串口发送指定长度的数据。如果超时没发送完成,则不再发送,返回超时标志(HAL_TIMEOUT)。
举例:
HAL_UART_Transmit(&huart1, (uint8_t *)ZZX, 3, 0xffff);
上述函数的意思是串口USART1发送三个字节数据,最大传输时间是0xffff
1.2.中断接收数据函数
中断接收数据:
HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
功能:
串口中断接收,以中断方式接收指定长度数据。大致过程是,设置数据存放位置,接收数据长度,然后使能串口接收中断。接收到数据时,会触发串口中断。再然后,串口中断函数处理,直到接收到指定长度数据,而后关闭中断,进入中断接收回调函数,不再触发接收中断。(只触发一次中断)
举例:
HAL_UART_Receive_IT(&huart1,(uint8_t *)&value,1);
上述函数的意思是触发中断接收一个字符,存储到value中
2.串口中断函数
HAL_UART_IRQHandler(UART_HandleTypeDef *huart): 串口中断处理函数
HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart): 串口发送中断回调函数
HAL_UART_TxHalfCpltCallback(UART_HandleTypeDef *huart): 串口发送一半中断回调函数(用的较少)
HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart): 串口接收中断回调函数
HAL_UART_RxHalfCpltCallback(UART_HandleTypeDef *huart):串口接收一半回调函数(用的较少)
HAL_UART_ErrorCallback():串口接收错误函数
2.1 串口接收中断回调函数
串口接收中断回调:
HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);
功能:
HAL库的中断进行完之后,并不会直接退出,而是会进入中断回调函数中,用户可以在其中设置代码, 串口中断接收完成之后,会进入该函数,该函数为空函数,用户需自行修改
举例:
HAL_UART_RxCpltCallback(&huart1){ //用户自定义的代码 }
2.2 串口中断处理函数
串口中断处理:
HAL_UART_IRQHandler(UART_HandleTypeDef *huart);
功能:
对接收到的数据进行判断和处理 判断是发送中断还是接收中断,然后进行数据的发送和接收,在中断服务函数中使用。如果接收数据,则会进行接收中断处理函数;如果发送数据,则会进行发送中断处理函数。
3.串口查询函数
HAL_UART_GetState(): 判断UART的接收是否结束,或者发送数据是否忙碌
举例:
while(HAL_UART_GetState(&huart4) == HAL_UART_STATE_BUSY_TX) //检测UART发送结束
4.重定义printf函数(以串口UART1为例)
我们以USART接收与发送为例进行简单说明,首先我们需要重定向printf函数,在c语言中我们只要包含<stdio.h>的库就可以直接调用printf打印函数,但是对于单片机而言,即使包含了这个库,我们也不知道打印的输出方是谁,这时候我们就需要告诉单片机向电脑PC端打印数据,因此需要重写printf函数,将fputc和fgetc函数重写即可:
//重写fget和fput函数
#include <stdio.h>
/**
* 函数功能: 重定向c库函数printf到DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
/**
* 函数功能: 重定向c库函数getchar,scanf到DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fgetc(FILE *f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1, &ch, 1, 0xffff);
return ch;
}
五、在keil5配置代码
1.打开通过CubeMX创建的项目
2.测试重定向的printf函数
在mian函数中写入重定向的printf函数:
//重写fget和fput函数
#include <stdio.h>
/**
* 函数功能: 重定向c库函数printf到DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
/**
* 函数功能: 重定向c库函数getchar,scanf到DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fgetc(FILE *f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1, &ch, 1, 0xffff);
return ch;
}
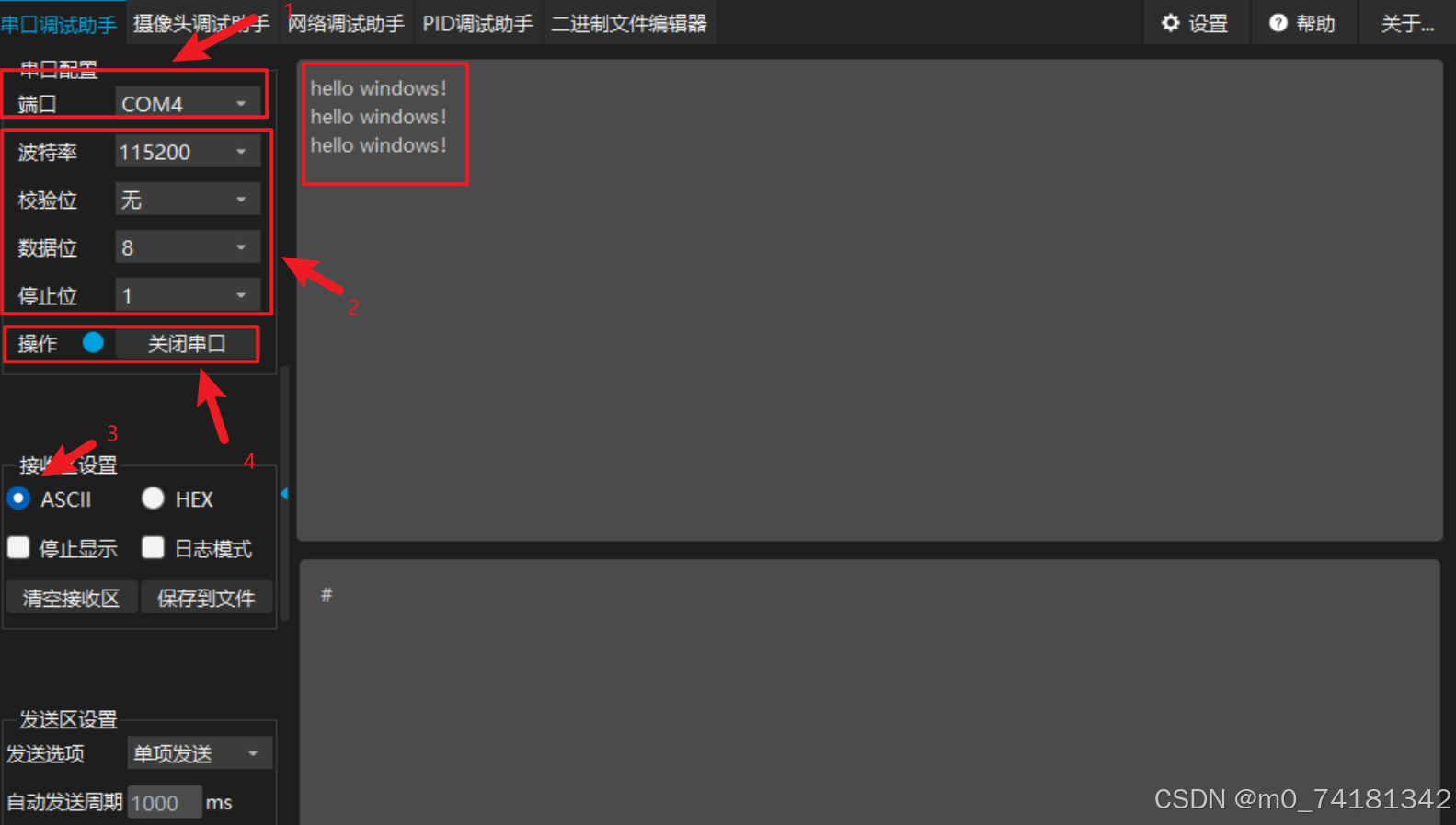
在while循环中加入打印"hello windows!"的语句,并延时1s
printf(“hello windows!\n”);
HAL_Delay(1000);
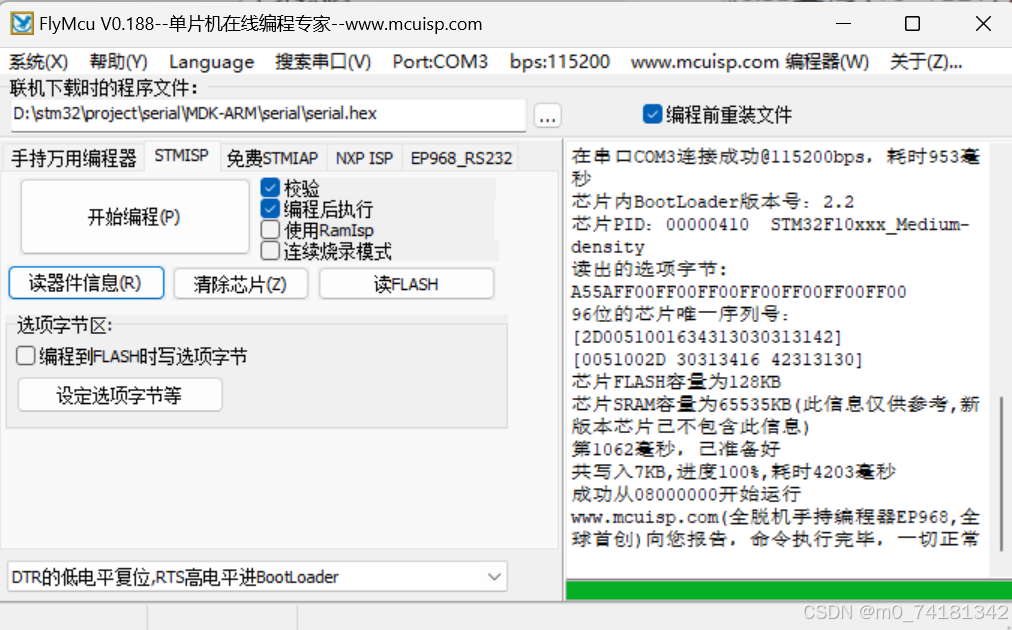
3.用flymccu烧录
找到hex文件
4.打开串口工具,开启串口
5.测试串口中断(发送"*“打印,发送”#"停止)
5.1 要求:
当上位机给stm32发送一个字符“#”后,stm32暂停发送“hello windows!”;发送一个字符“*”后,stm32继续发送;
5.2 思路:
给STM32设置一个接收中断函数 HAL_UART_Receive_IT,该函数是为了接收上位机发送的指令 order,当上位机发送指令时,触发中断,STM32以中断方式接收到命令后,不会退出中断,而是会触发中断回滚函数HAL_UART_RxCpltCallback,而中断回滚函数函数体内部是由我们用户自定义的代码,因此我们可以在此根据指令的不同进行数据发送或者停止发送。
main函数内容如下:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
#include <String.h>
//重写fget和fput函数!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
#include <stdio.h>
/**
* 函数功能: 重定向c库函数printf到DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
/**
* 函数功能: 重定向c库函数getchar,scanf到DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fgetc(FILE *f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1, &ch, 1, 0xffff);
return ch;
}
char order;//指令 0:停止 1:开始
char message[]="hello windows!\n";//输出信息
char tips[]="CommandError\n";//提示1
char tips1[]="Start.....\n";//提示2
char tips2[]="Stop......\n";//提示3
int flag=0;//标志 0:停止发送 1.开始发送
void SystemClock_Config(void);
void test()
{
printf("helloworld");
HAL_Delay(1000);
}
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
//设置接受中断
// 串口中断接收,以中断方式接收指定长度数据。大致过程是,设置数据存放位置,接收数据长度,
// 然后使能串口接收中断。接收到数据时,会触发串口中断。再然后,串口中断函数处理,直到接收到指定长度数据,
// 而后关闭中断,进入中断接收回调函数,不再触发接收中断。(只触发一次中断)
HAL_UART_Receive_IT(&huart1, (uint8_t *)&order, 1);
//当flag为1时,每秒发送一次信息
//当flag为0时,停止
while (1)
{
if(flag==1)
{
//发送信息
HAL_UART_Transmit(&huart1, (uint8_t *)&message,strlen(message),0xFFFF);
//延时
HAL_Delay(1000);
}
// test();
}
}
//HAL库的接收中断进行完之后,并不会直接退出,而是会进入中断回调函数中,用户可以在其中设置代码,
//串口中断接收完成之后,会进入该函数,该函数为空函数,用户需自行修改
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
//当输入的指令为0时,发送提示并改变flag
if(order=='#'){
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips2, strlen(tips2),0xFFFF);
}
//当输入的指令为1时,发送提示并改变flag
else if(order=='*'){
flag=1;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips1, strlen(tips1),0xFFFF);
}
//当输入不存在指令时,发送提示并改变flag
else {
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips, strlen(tips),0xFFFF);
}
//重新设置中断
HAL_UART_Receive_IT(&huart1, (uint8_t *)&order, 1);
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
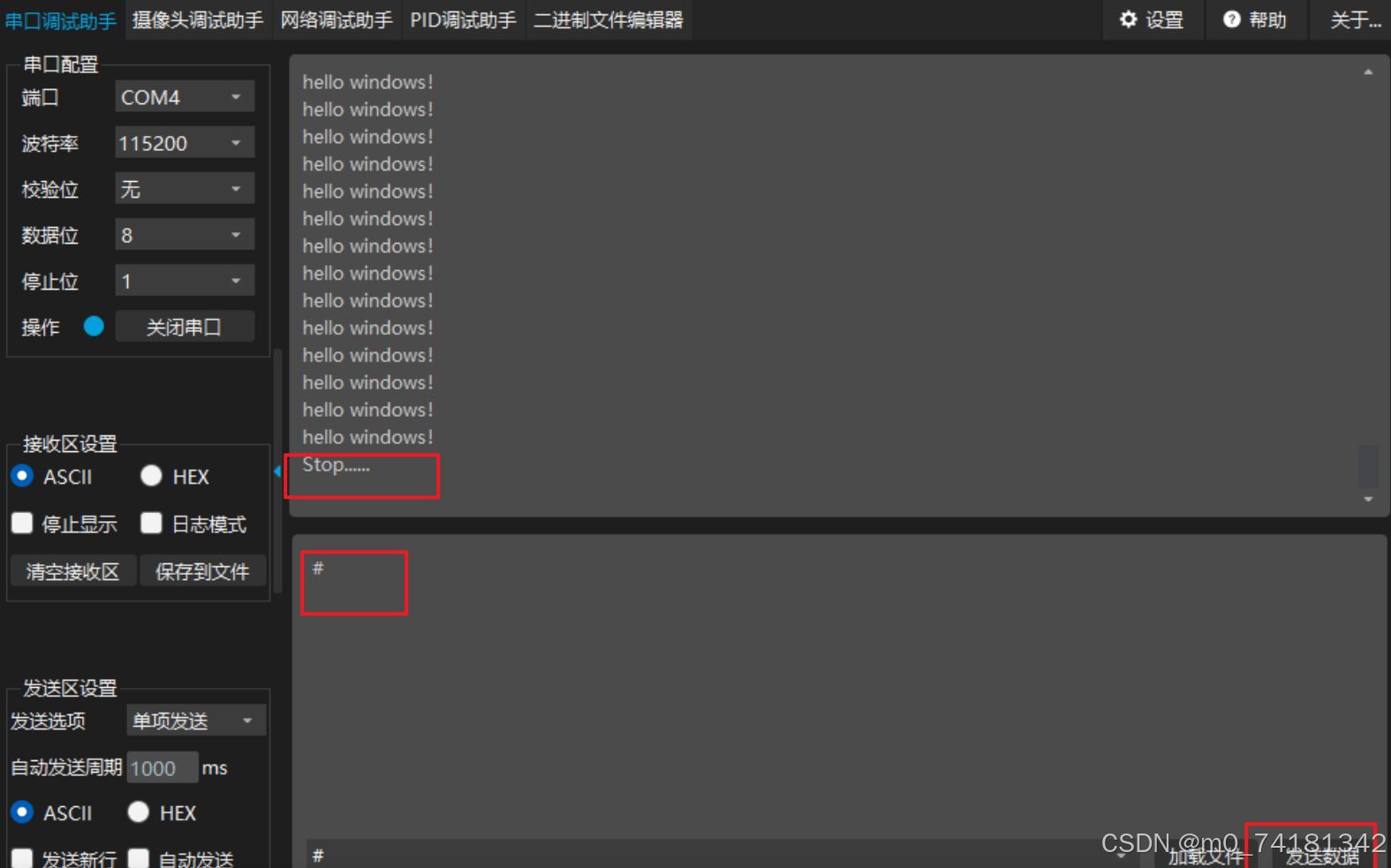
5.3 运行效果:
电脑发送“*”,串口打印“hello windows!”
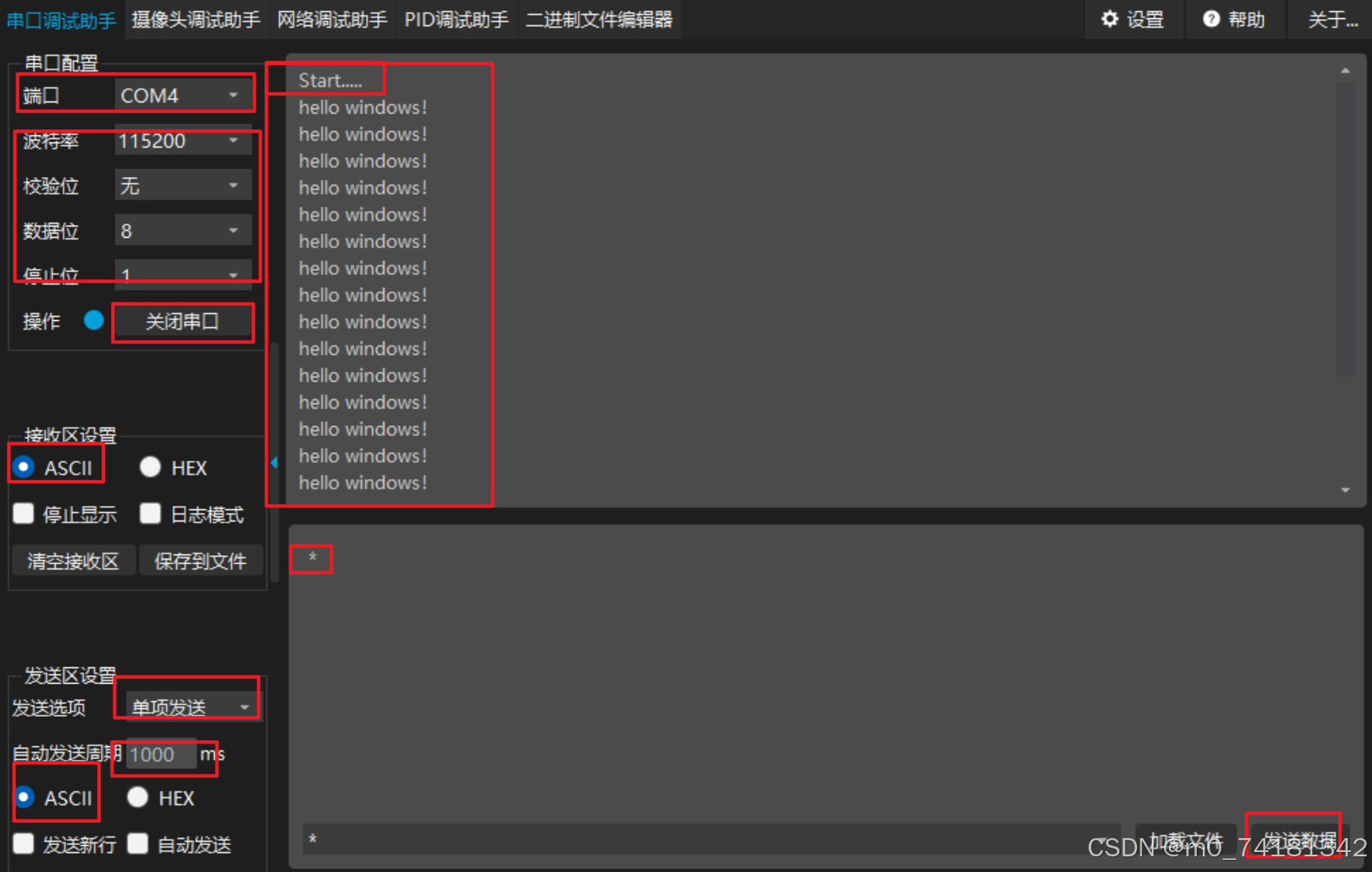
电脑发送“#”,串口停止发送“hello windows!”
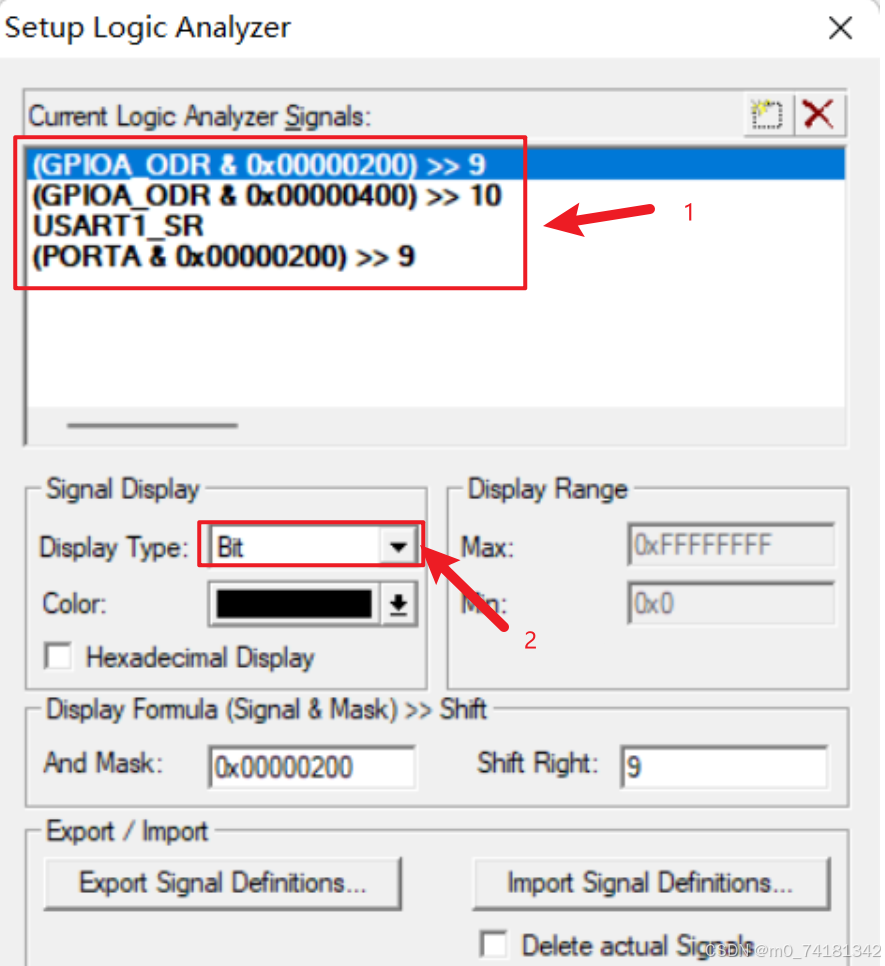
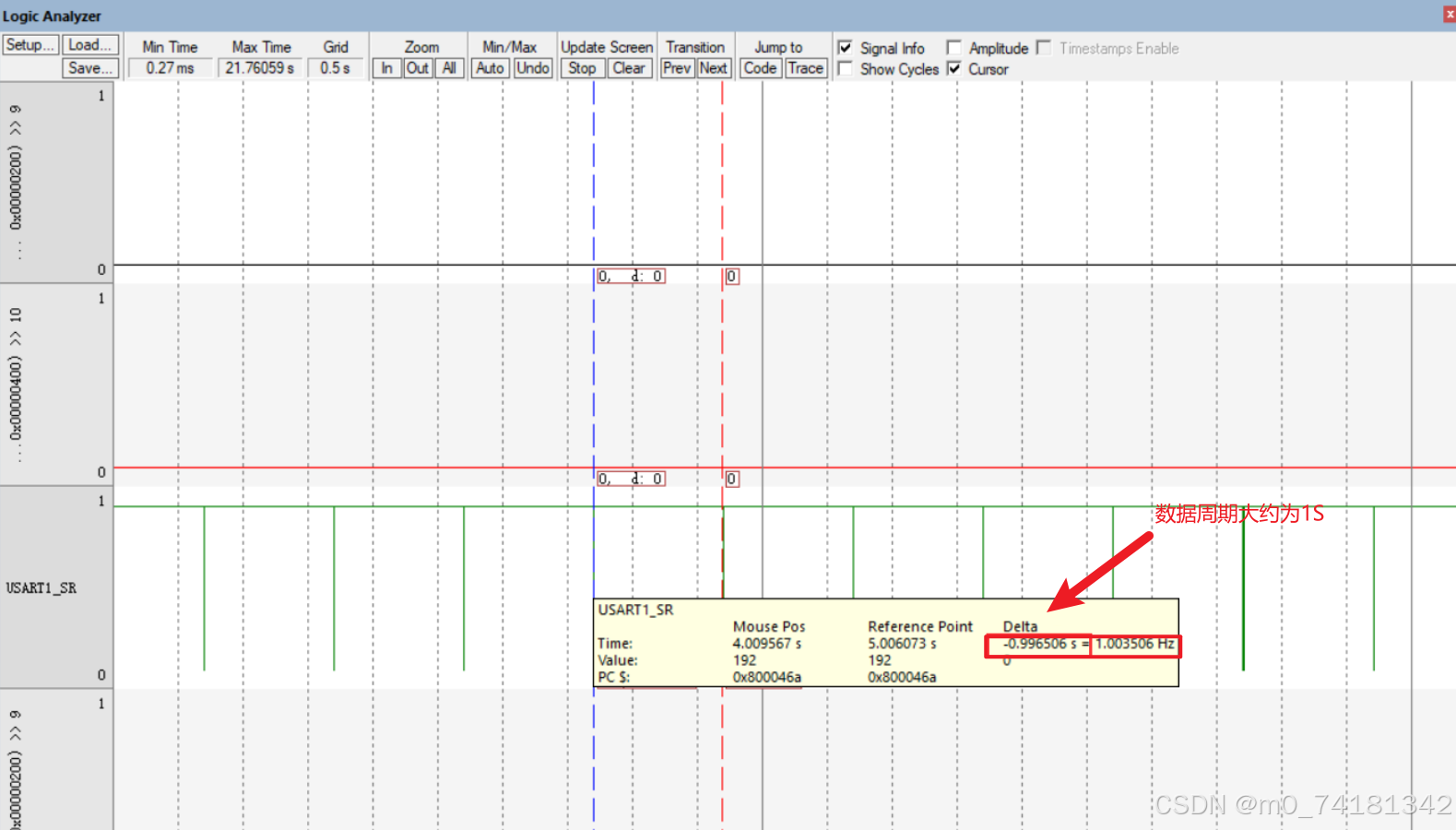
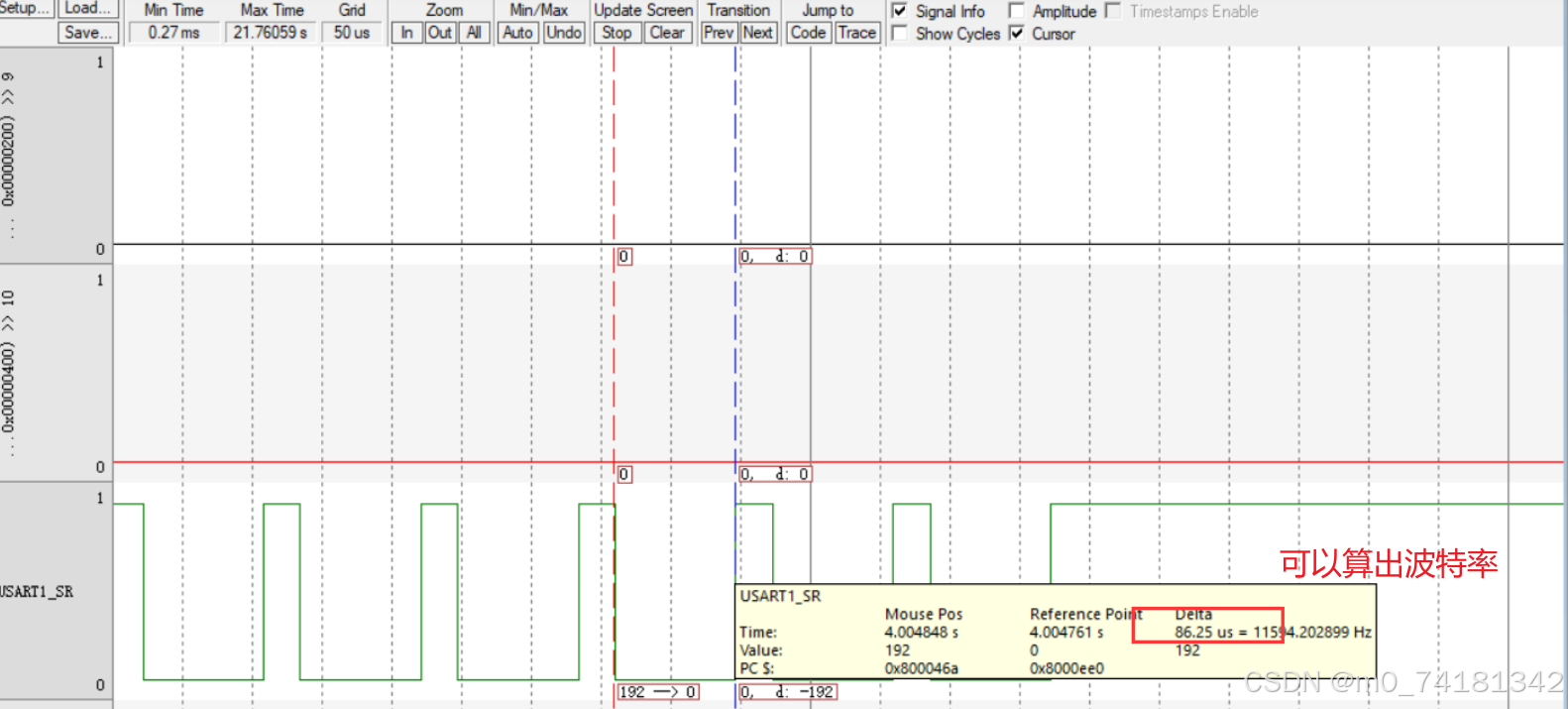
六、使用Keil的软件仿真逻辑分析仪功能观察串口输出波形
七、总结
使用 STM32CubeMX 配合 Keil,无论是采用 HAL 库还是标准库进行串口通信,都需要对串口的基本原理、相关配置参数以及对应的函数(或寄存器操作)有清晰的了解,并且结合硬件实际情况进行调试,才能实现稳定可靠的串口通信功能。
八、参考文档
https://blog.csdn.net/weixin_68811361/article/details/134040624

















 750
750

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









