







接线
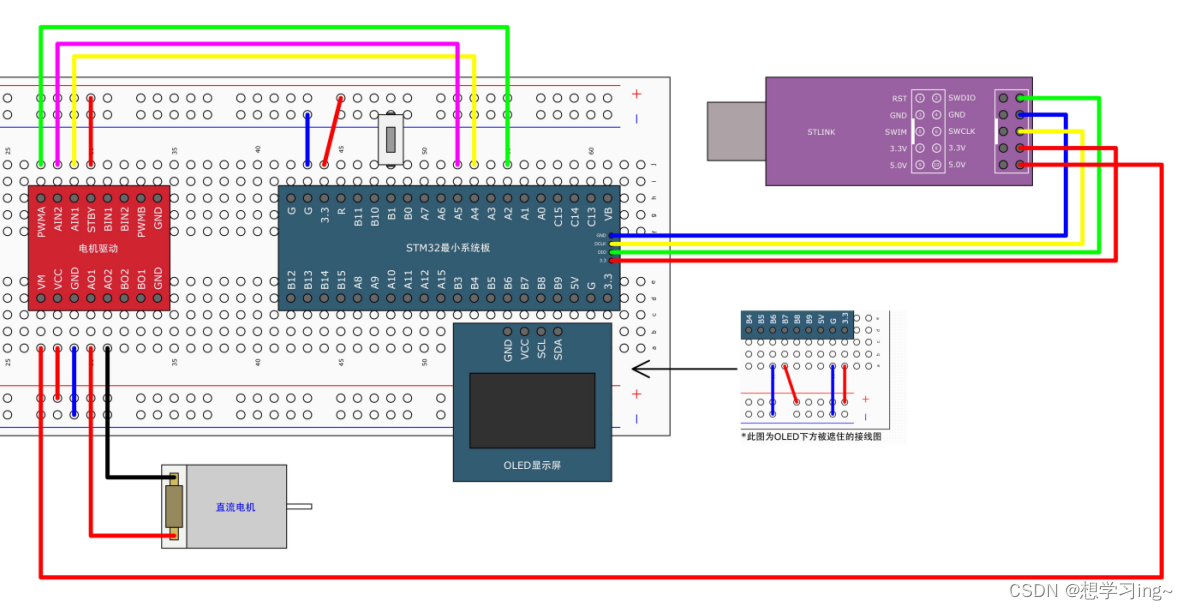
| PB1 | 独立按键 |
| PB8 | OLED的SCL |
| PB9 | OLED的SDA |
| PA2 | PWMA |
| PA4 | AIN1 |
| PA5 | AIN2 |
| STLink的5V接口 | VM |
| AO1 | 直流电机 |
| AO2 | 直流电机 |
配置流程
PWM模块
上一篇有讲到PWM的配置,此处不多赘述,细节部分可以参考上一篇。
原文链接:https://blog.csdn.net/m0_74246768/article/details/139050032
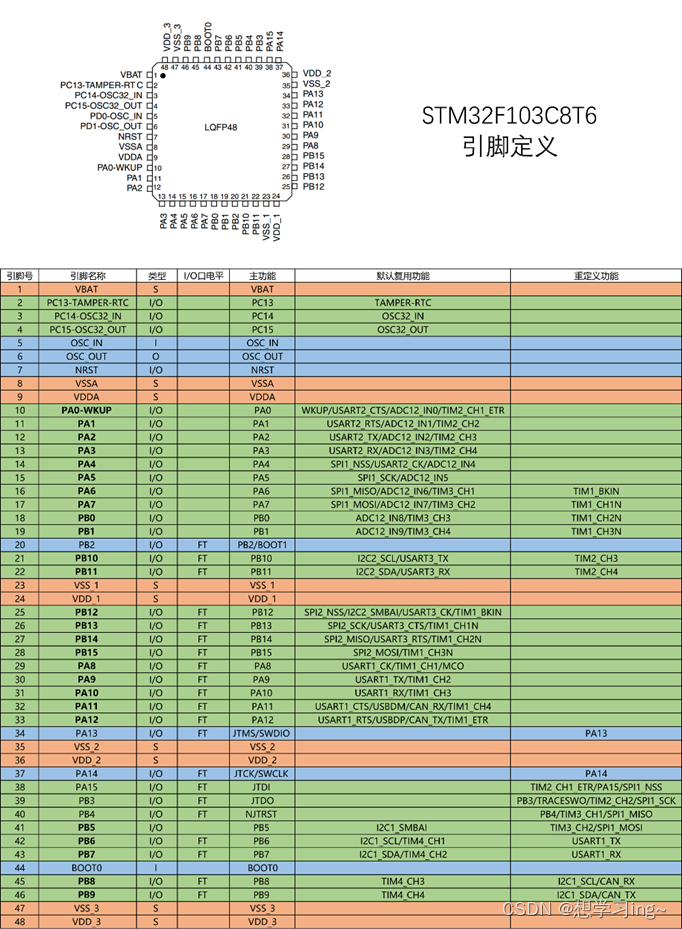
上一篇代码使用的是TIM2的通道一,这一篇我们使用的引脚是PA2连接PWM ,根据引脚图,可以看到我们使用的是通道3。
PWM.c
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 6832
6832

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









