






本机配置:
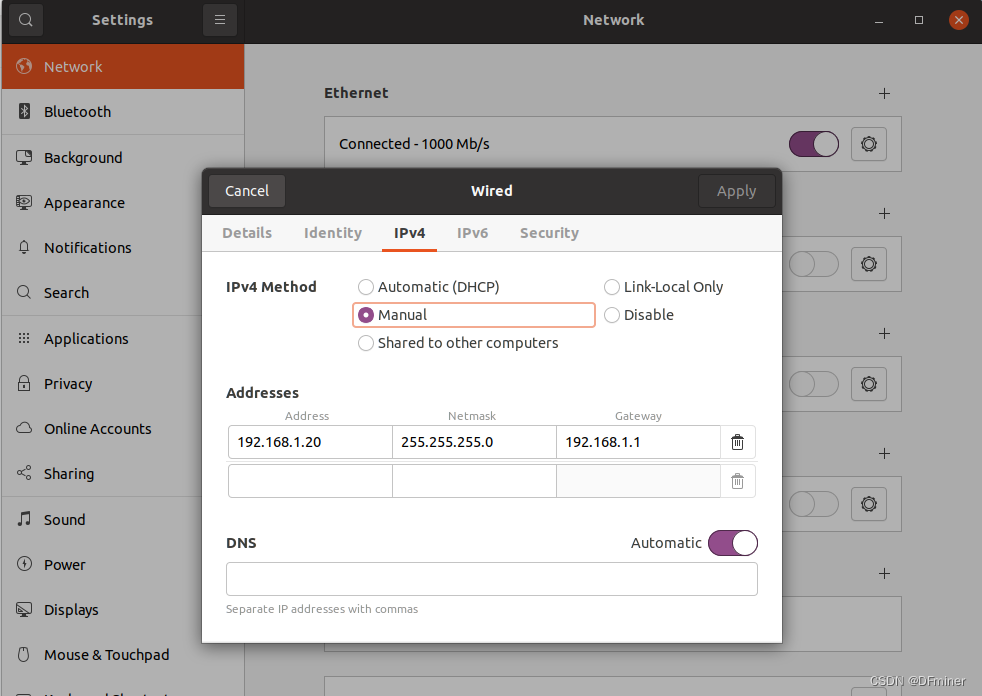
设置ip,防止与本地机器ip冲突
安装搜狗或google输入法
Ubuntu系统安装搜狗(sougou for linux)输入法详细教程_sogou-CSDN博客
【Linux】Ubuntu20.04版本安装谷歌中文输入法【教程】_google输入法 ubuntu-CSDN博客
安装Nomachine
要查看Orin的ARM版本,可以使用以下命令:
cat /proc/cpuinfo

所以我们下载 ARM v8 DEB包
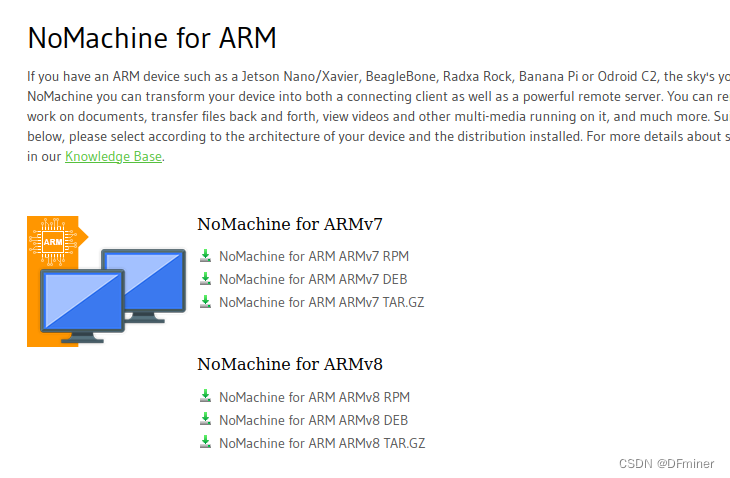
$ sudo dpkg -i nomachine_8.9.1_1_arm64.deb
安装飞书(可传送大文件,比百度网盘和微信传输助手好用)
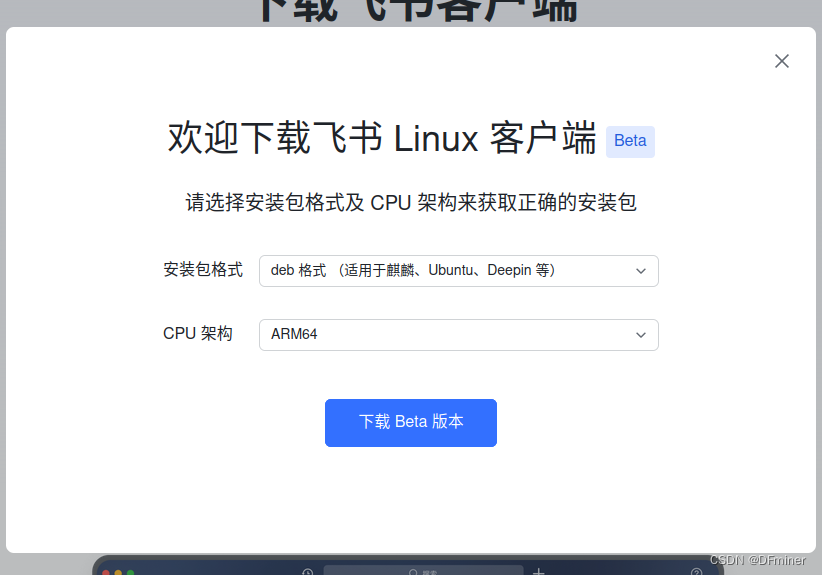
$ sudo dpkg -i 文件名docker配置
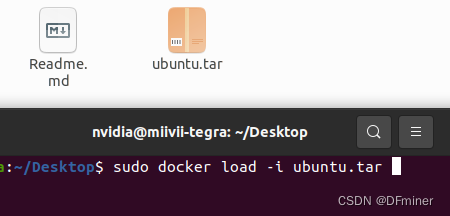
如何把已有镜像移植到新的Orin机器里?
sudo docker load -i 镜像名(其实就是打包出来的tar包名)例如:
如何新建一个镜像?
新建一个文件夹,文件夹名就是镜像名。
里面新建文档,名字一定要叫 Dockerfile。
里面第一行是我们要安装的镜像,完整的ubuntu20.04

保存,退出。打开终端,输入
sudo docker build -t 镜像名 .例如:

查看镜像
sudo docker images 
第一次新建容器的命令
sudo docker run -id --name=XinJianRongQi --net=host --runtime nvidia -e DISPLAY=$DISPLAY -v /tmp/.X11-unix/:/tmp/.X11-unix -v /home/nvidia/share_opt:/share_opt -v /tmp/argus_socket:/tmp/argus_socket --device=/dev/video0 --device=/dev/video2 --device=/dev/video4 --device=/dev/video6 --privileged=true demo_docker_images:latest
### XinJianRongQi 是新建的容器名。
###demo_docker_images:latest 是 镜像名:tag

查看容器sudo docker ps -a
打开容器sudo docker start XinJianRongQi
进入容器并给容器环境sudo docker exec -it XinJianRongQi /bin/bash

接下来在容器内配置需要的环境
# vscode
商店里的VSCode是阉割版的,想要输入中文需要按照以下方式安装。
```
apt-get install -y wget
apt-get install -y sudo
wget -qO- https://packages.microsoft.com/keys/microsoft.asc | gpg --dearmor > packages.microsoft.gpg
sudo install -o root -g root -m 644 packages.microsoft.gpg /etc/apt/trusted.gpg.d/
sudo sh -c 'echo "deb [arch=amd64,arm64,armhf signed-by=/etc/apt/trusted.gpg.d/packages.microsoft.gpg] https://packages.microsoft.com/repos/code stable main" > /etc/apt/sources.list.d/vscode.list'
rm -f packages.microsoft.gpg
sudo apt install apt-transport-https
sudo apt update
sudo apt install -y code
```
出现报错!!两种方法选哪种?而且我打不开,home下是空的。

VSCode使用记录四:Ubuntu终端启动报错以及Ubuntu查看修改文件夹权限_you are trying to start visual studio code as a su-CSDN博客
# ros
https://blog.csdn.net/qq_43326927/article/details/121178757
# xterm
可视化软件
```
sudo apt install xterm
```
# catkin build
编译软件,相比于ros自带的catkin_make, catkin build能够独立编译项目中的每一个包
```
sudo apt install python3-pip
pip3 install catkin-tools catkin-tools-python
```
# livox-SDK2
注意!是livox-SDK2,不是livox-SDK
https://github.com/Livox-SDK/Livox-SDK2
```
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install
```
# gtsam
https://github.com/borglab/gtsam
进入Gtsam,找到cmake文件夹
输入指令 gedit HandleEigen.cmake
找到 if (GTSAM_USE_SYSTEM_EIGEN)
在上面添加一行指令:set(GTSAM_USE_SYSTEM_EIGEN ON) 保存退出
cd .. && mkdir build
cmake .. 看USE_SYSTEM_EIGEN 是否为ON
如果为ON make
sudo make install
# geographiclib
https://blog.csdn.net/sinat_25923849/article/details/115625911?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522166878145016782414999306%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=166878145016782414999306&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduend~default-1-115625911-null-null.142^v65^control,201^v3^control_2,213^v2^t3_esquery_v3&utm_term=geographiclib&spm=1018.2226.3001.4187
# 主项目
1. 修改 src/FAST-LIO/config/hap.yaml 中的save_path, 调整至本机电脑中希望储存建图结果的文件夹
2. 修改 src/rtk_mapping/launch/map_with_fastlio.launch中的map_path,调整至本机电脑中希望储存建图结果的文件夹(与1中的文件夹区分开,可随意选择)
3.
```
catkin build -DROS_EDITION=ROS1
```



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











