







 该文详细介绍了如何下载并安装Livox的ROS驱动(livox_ros_driver2)和Livox-SDK2,包括从GitHub克隆项目,创建工作空间,安装cmake,以及在特定目录下编译和安装SDK。对于ROSNoetic用户,文章提供了执行build.sh脚本的步骤,最后提到连接雷达设备并运行以查看实时数据。
该文详细介绍了如何下载并安装Livox的ROS驱动(livox_ros_driver2)和Livox-SDK2,包括从GitHub克隆项目,创建工作空间,安装cmake,以及在特定目录下编译和安装SDK。对于ROSNoetic用户,文章提供了执行build.sh脚本的步骤,最后提到连接雷达设备并运行以查看实时数据。
第一步 进入官网下载地址,并阅读readme文件GitHub - Livox-SDK/livox_ros_driver2: Livox device driver under Ros(Compatible with ros and ros2), support Lidar HAP and Mid-360.
(部分截图如下) 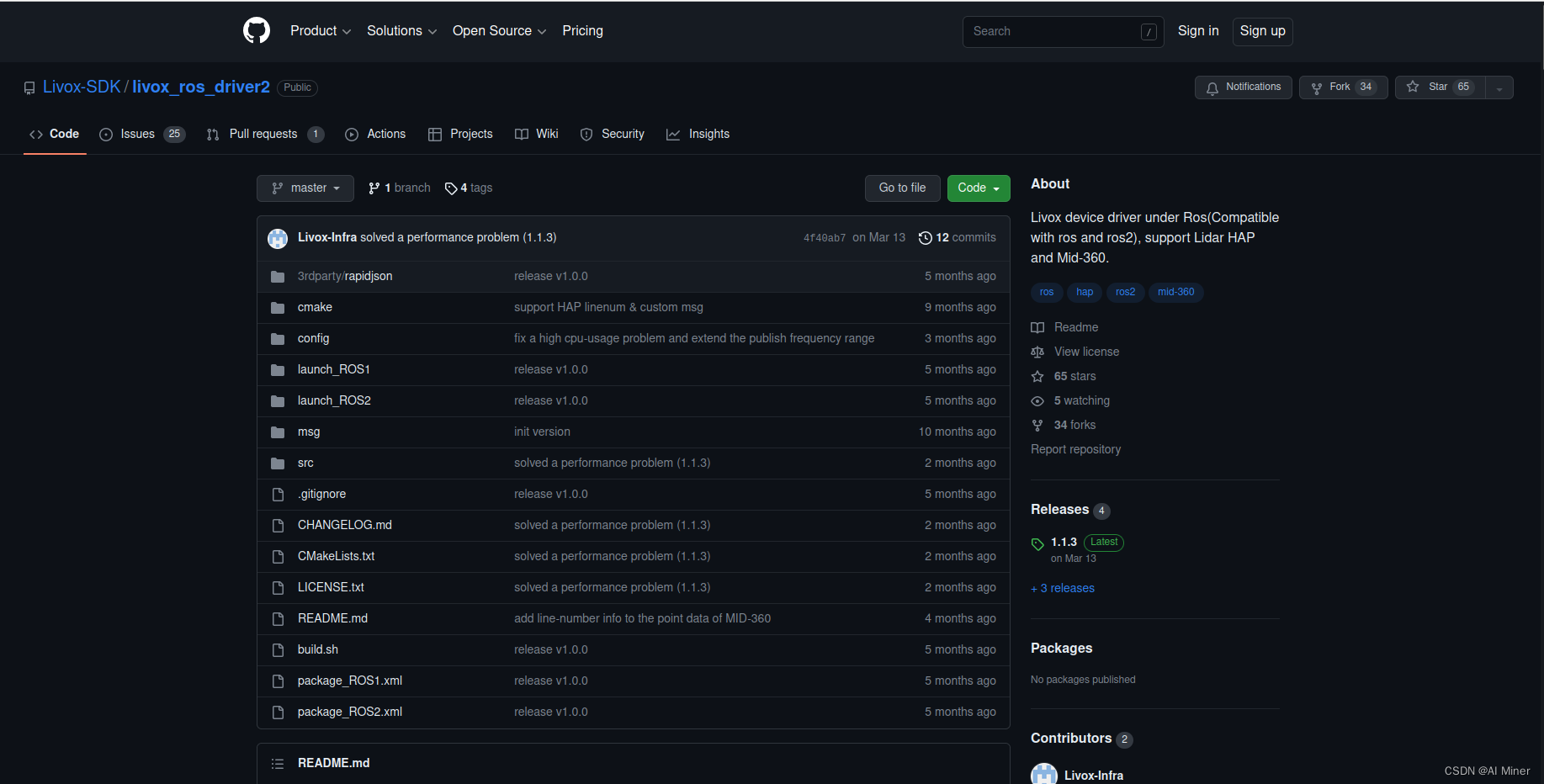
接着找一个喜欢的地方放工作空间,我就放在主目录下了(在主目录下打开终端)输入下面这句
git clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver2
这句话的意思是:在我打开终端的位置(即主目录下)克隆livox_ros_driver2包 , 并新建工作空间ws_livox,并在工作空间ws_livox的src目录下安装livox_ros_driver2包 。
接下来要求我们安装 Livox-SDK2 。
打开下载安装 Livox-SDK2 的地址,并阅读readme文件(下面是部分截图)GitHub - Livox-SDK/Livox-SDK2: Drivers for receiving LiDAR data and controlling lidar, support Lidar HAP and Mid-360.

如果没安装过 cmake ,那么执行下面这步
sudo apt install cmake安装过就跳过上面这步。
接下来要克隆 Livox-SDK2 包,这里我们要把安装位置选在 ”livox_ros_driver2“ 相同目录下,也就是要在工作空间ws_livox的src目录下打开终端,执行下面这句话。
git clone https://github.com/Livox-SDK/Livox-SDK2.git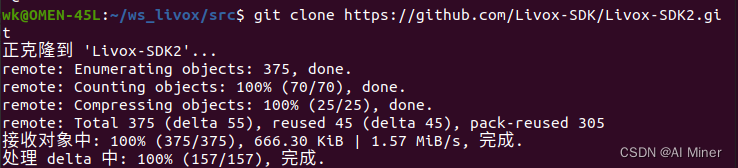
现在livox_ros_driver2包和Livox-SDK2包 是在同一目录下的(如下图)
接下来依次执行下面的语句
$ cd ./Livox-SDK2/
$ mkdir build
$ cd build
$ cmake .. && make -j

然后执行下面这句话
sudo make install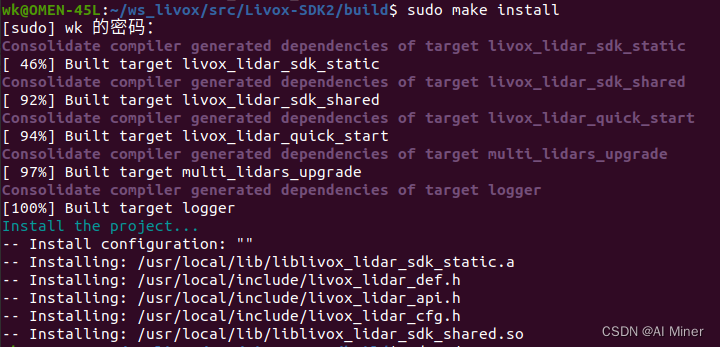
到这里Livox-SDK2 安装完毕。
接下来回到安装livox_ros_driver2的步骤里继续。
在livox_ros_driver2下打开终端(如下图)
执行下面的语句的其中一个(选符合你的ros版本的)
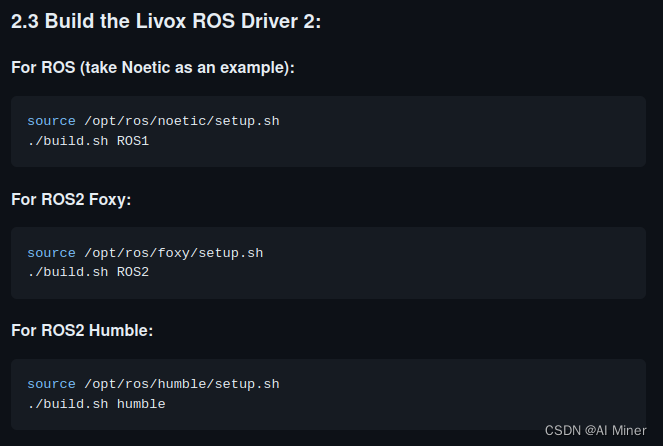
我的ros是Noetic,所以我执行的是第一块(也就是下面这段)
source /opt/ros/noetic/setup.sh
./build.sh ROS1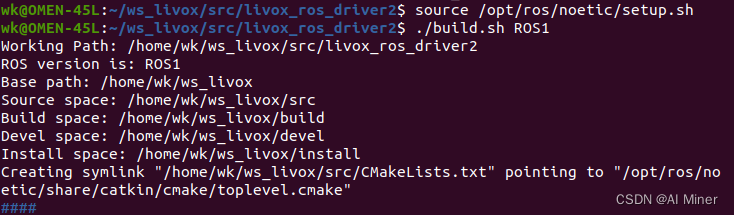
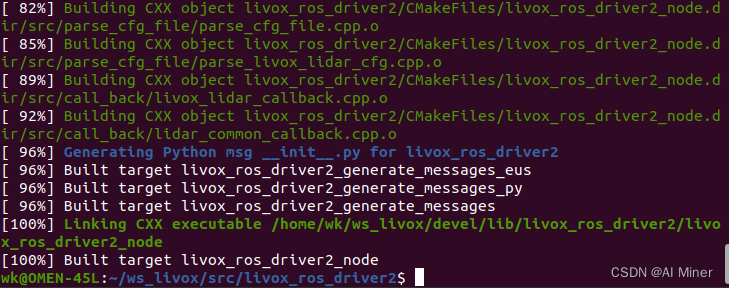
搞定
然后接入雷达数据(实时的真雷达数据)run一下看看
------分割线-------
待续...



















 4546
4546

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











