







Canny边缘检测
一,Canny 边缘检测基础
Canny 边缘检测分为如下几个步骤。
步骤 1:去噪。噪声会影响边缘检测的准确性,因此首先要将噪声过滤掉。
步骤 2:计算梯度的幅度与方向。
步骤 3:非极大值抑制,即适当地让边缘“变瘦”。
步骤 4:确定边缘。使用双阈值算法确定最终的边缘信息。
(1)应用高斯滤波去除图像噪声
由于图像边缘非常容易受到噪声的干扰,因此为了避免检测到错误的边缘信息,通常需要 对图像进行滤波以去除噪声。滤波的目的是平滑一些纹理较弱的非边缘区域,以便得到更准确 的边缘。在实际处理过程中,通常采用高斯滤波去除图像中的噪声。
在之前文章中我们已经提及过高斯滤波的原理和使用,在这里我们简单回顾一下:
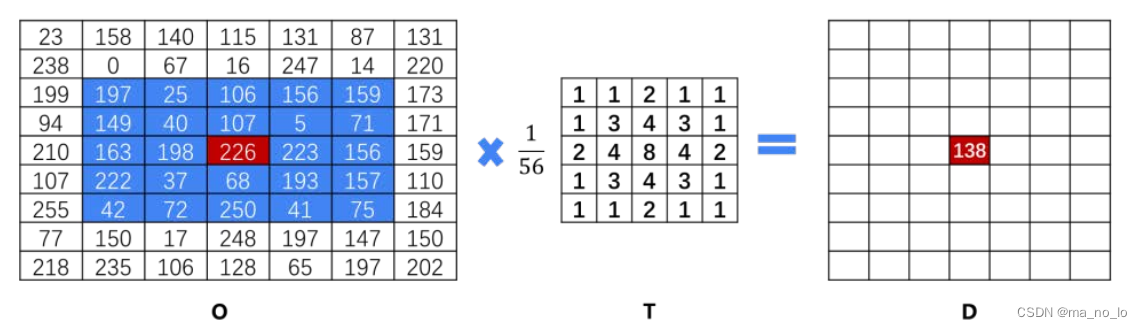
如图,左图是原始图像(o),它与一个卷积核相乘并将运算结果替换掉目标元素(226 --> 138),高斯滤波器应用平均值卷积核,所以要乘个1/56。
在滤波过程中,我们通过滤波器对像素点周围的像素计算加权平均值,获取最终滤波结果。 对于高斯滤波器 T,越临近中心的点,权值越大。
当然,高斯滤波器(高斯核)并不是固定的,例如它还可以是:
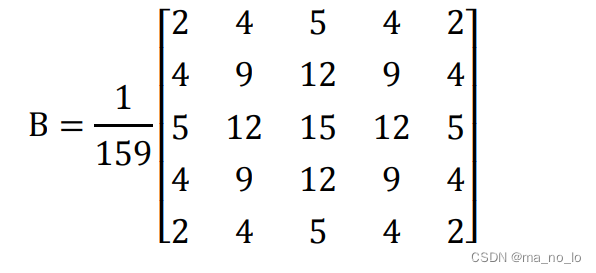
滤波器的大小也是可变的,高斯核的大小对于边缘检测的效果具有很重要的作用。滤波器 的核越大,边缘信息对于噪声的敏感度就越低。不过,核越大,边缘检测的定位错误也会随之 增加。通常来说,一个 5×5 的核能够满足大多数的情况。
(2)计算梯度
在上一篇文章中我们提及过计算梯度的三个算子:Sobel,Scharr,Laplacian算子,在这里我们就不再赘述原理部分了。此刻我们更加关注方向:梯度的方向与边缘的方向是垂直的。
边缘检测算子返回水平方向的Gx和垂直方向的Gy。梯度的幅度G和方向Θ(用角度值表示) 为:
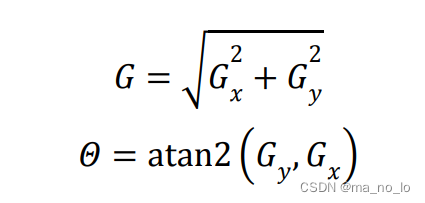
- atan2(•)表示具有两个参数的 arctan 函数。
梯度的方向总是与边缘垂直的,通常就近取值为水平(左、右)、垂直(上、下)、对角线 (右上、左上、左下、右下)等 8 个不同的方向。
因此,在计算梯度时,我们会得到梯度的幅度和角度(代表梯度的方向)两个值。
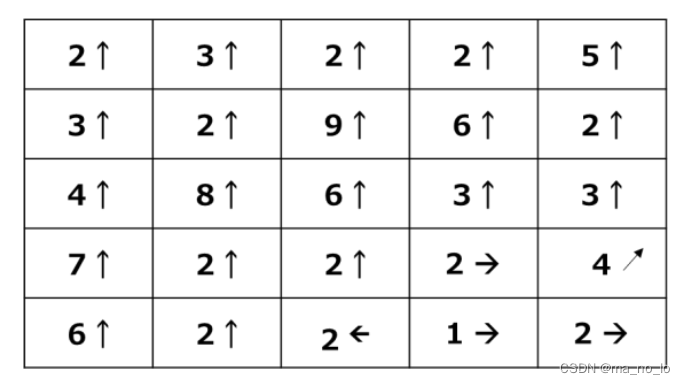
如图,每一个梯度包含幅度和角度两个不同的值。为了方 便观察,这里使用了可视化表示方法。例如,左上角顶点的值“2↑”实际上表示的是一个二 元数对“(2, 90)”,表示梯度的幅度为 2,角度为 90°。
(3)非极大值抑制
在获得了梯度的幅度和方向后,遍历图像中的像素点,去除所有非边缘的点。在具体实现时,逐一遍历像素点,判断当前像素点是否是周围像素点中具有相同梯度方向的最大值,并根据判断结果决定是否抑制该点。通过以上描述可知,该步骤是边缘细化的过程。针对每一个像素点:
- 如果该点是正/负梯度方向上的局部最大值,则保留该点。
- 如果不是,则抑制该点(归零)。
如图,A、B、C 三点具有相同的方向(梯度方向垂直于边缘)。判断这三个点是否为各自的局部最大值:如果是,则保留该点;否则,抑制该点(归零)。
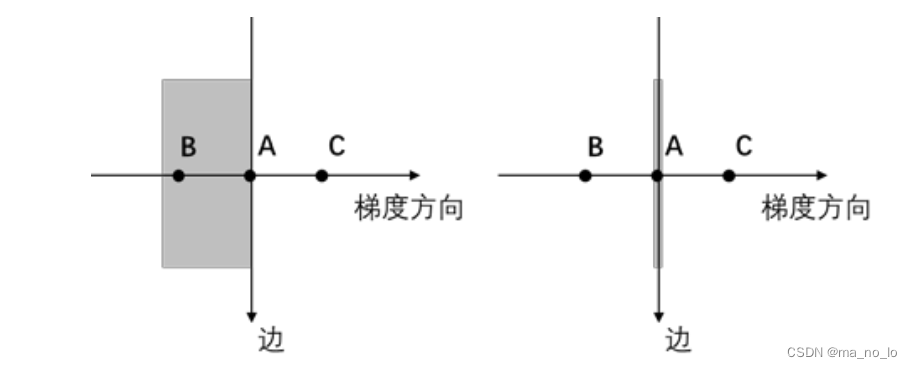
经过比较判断可知,A 点具有最大的局部值,所以保留 A 点(称为边缘),其余两点(B 和 C)被抑制(归零)。
如图,黑色背景的点都是向上方向梯度(水平边缘)的局部最大值。因此,这些 点会被保留;其余点被抑制(处理为 0)。这意味着,这些黑色背景的点最终会被处理为边缘点, 而其他点都被处理为非边缘点。
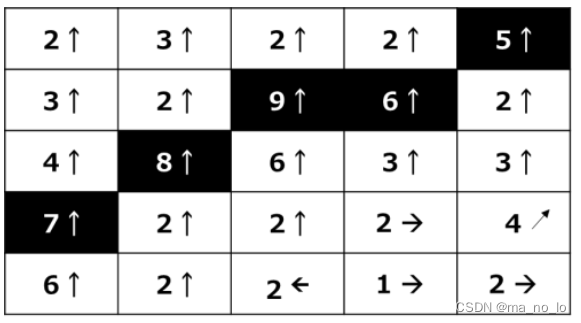
“正/负梯度方向上”是指相反方向的梯度方向。例如,在图 10-5 中,黑色背景的像素点都是垂直方向梯度(向上、向下)方向上(即水平边缘)的局部最大值。这些点最终会被处理为边缘点。
经过上述处理后,对于同一个方向的若干个边缘点,基本上仅保留了一个,因此实现了边缘细化的目的。
(4)应用双阈值确定边缘
完成上述步骤后,图像内的强边缘已经在当前获取的边缘图像内。但是,一些虚边缘可能也在边缘图像内。这些虚边缘可能是真实图像产生的,也可能是由于噪声所产生的。对于后者, 必须将其剔除。
设置两个阈值,其中一个为高阈值 maxVal,另一个为低阈值 minVal。根据当前边缘像素 的梯度值(指的是梯度幅度,下同)与这两个阈值之间的关系,判断边缘的属性。具体步骤为:
(1)如果当前边缘像素的梯度值大于或等于 maxVal,则将当前边缘像素标记为强边缘。
(2)如果当前边缘像素的梯度值介于 maxVal 与 minVal 之间,则将当前边缘像素标记为虚 边缘(需要保留)。
(3)如果当前边缘像素的梯度值小于或等于 minVal,则抑制当前边缘像素。 在上述过程中,我们得到了虚边缘,需要对其做进一步处理。一般通过判断虚边缘与强边 缘是否连接,来确定虚边缘到底属于哪种情况。通常情况下,如果一个虚边缘:
- 与强边缘连接,则将该边缘处理为边缘。
- 与强边缘无连接,则该边缘为弱边缘,将其抑制。
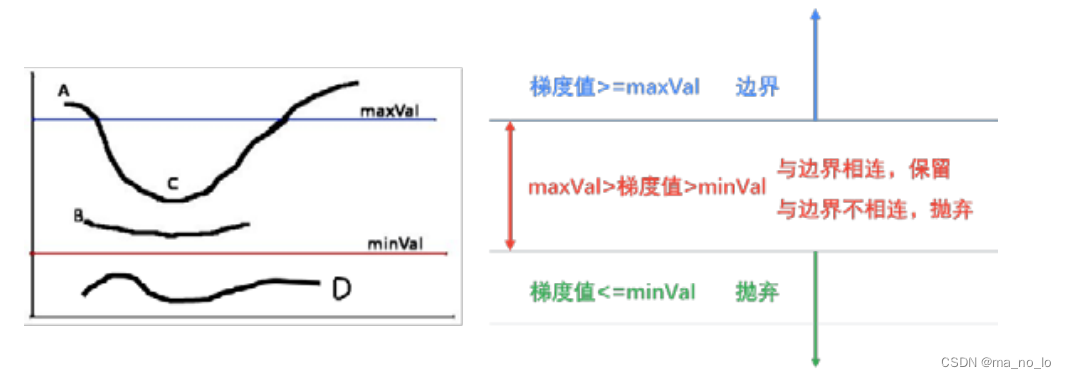
如下图,左图显示的是三个边缘信息,右图是对边缘信息进行分类的示意图,具体 划分如下:
- A 点的梯度值值大于 maxVal,因此 A 是强边缘。
- B 和 C 点的梯度值介于 maxVal 和 minVal 之间,因此 B、C 是虚边缘。
- D 点的梯度值小于 minVal,因此 D 被抑制(抛弃)。
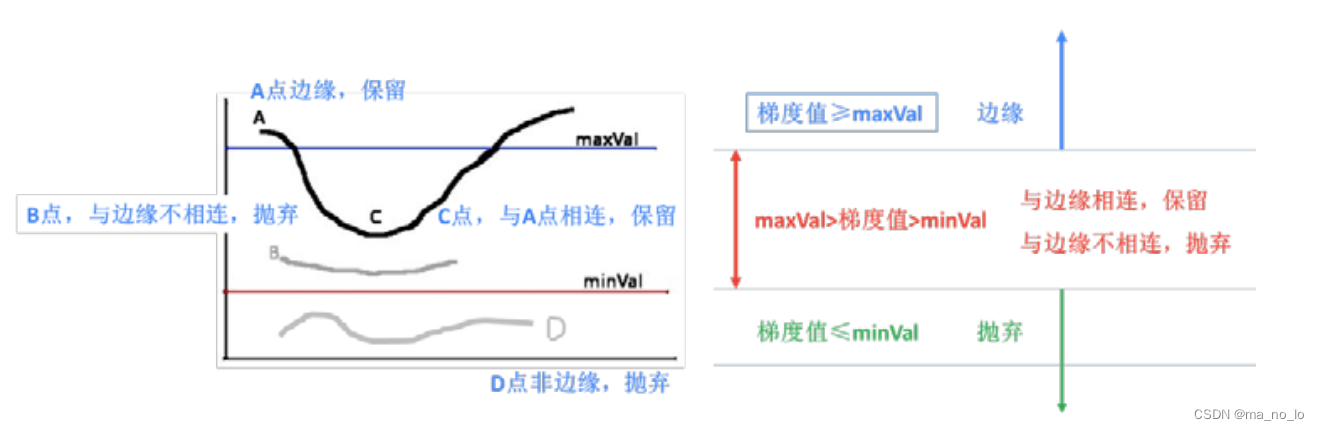
下图就是上图的处理结果,其中:
- B点的梯度值介于maxVal 和 minVal之间,是虚边缘,但该点与强边缘不相连,故将其抛弃。
- C点的梯度值介于maxVal 和 minVal之间,是虚边缘,但该点与强边缘 A 相连,故将其保留。
注意,高阈值 maxVal 和低阈值 minVal 不是固定的,需要针对不同的图像进行定义。
二,Canny 函数及使用
(1)函数解析
edges = cv.Canny( image, threshold1, threshold2[, apertureSize[, L2gradient]])
- edges 为计算得到的边缘图像。
- image 为 8 位输入图像。
- threshold1 表示处理过程中的第一个阈值。
- threshold2 表示处理过程中的第二个阈值。
- apertureSize 表示 Sobel 算子的孔径大小。
- L2gradient 为计算图像梯度幅度(gradient magnitude)的标识。其默认值为False。如果为 True,则使用更精确的 L2 范数进行计算(即两个方向的导数的平方和再开方),否则使用 L1 范数(直接将两个方向导数的绝对值相加)。

(2)代码示例
import cv2
import numpy as np
import matplotlib.pyplot as plt
if __name__ == '__main__':
img = cv2.imread("street.jpg",cv2.IMREAD_GRAYSCALE)
canny_tight = cv2.Canny(img,100,150)
canny_loose = cv2.Canny(img,50,150)
plt.subplot(121),plt.imshow(canny_tight),plt.title("Canny_Tight")
plt.subplot(122),plt.imshow(canny_loose),plt.title("Canny_Loose")
plt.show()
cv2.waitKey(0)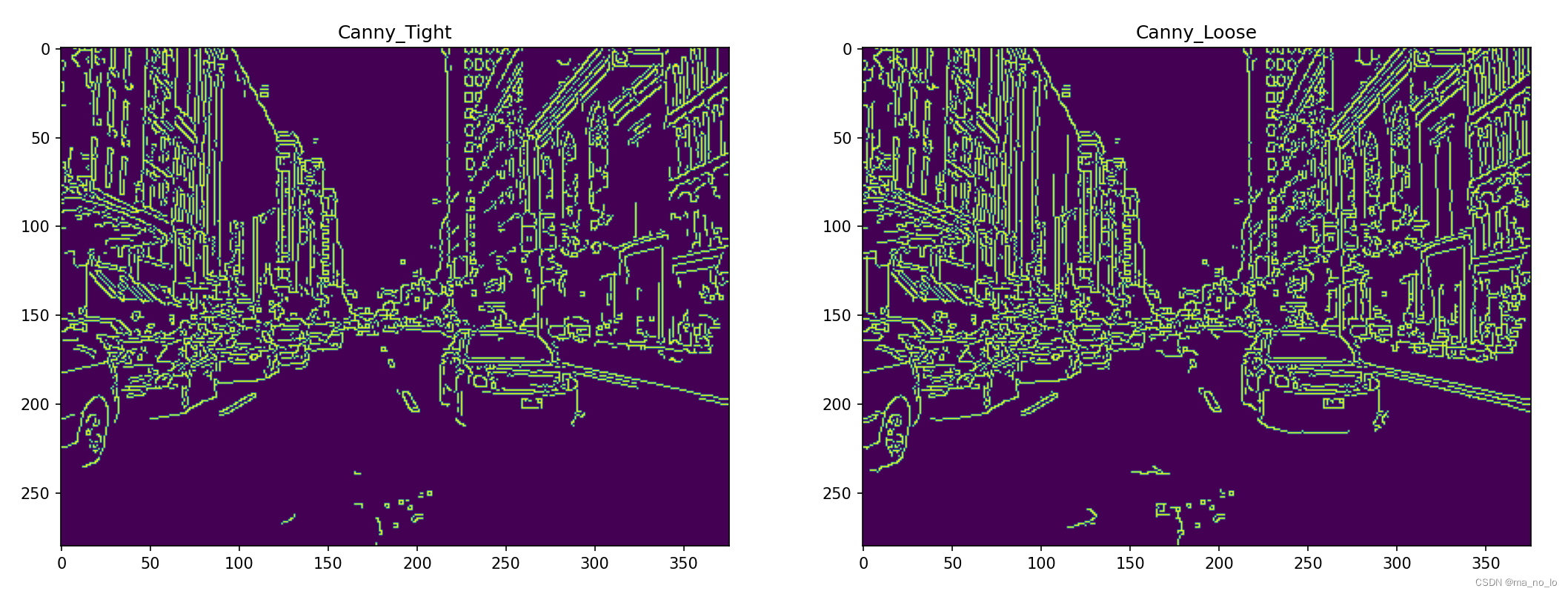
对比发现右图细节明显更多,这是因为我们放宽了边缘的限制。但是这幅图噪声不多,接下来我们使用具有噪声的图像观察一下:
import cv2
import numpy as np
import matplotlib.pyplot as plt
if __name__ == '__main__':
img = cv2.imread("lenaNoise.png",cv2.IMREAD_GRAYSCALE)
canny_tight = cv2.Canny(img,100,150)
canny_loose = cv2.Canny(img,50,150)
plt.subplot(121),plt.imshow(canny_tight),plt.title("Canny_Tight")
plt.subplot(122),plt.imshow(canny_loose),plt.title("Canny_Loose")
plt.show()
cv2.waitKey(0) 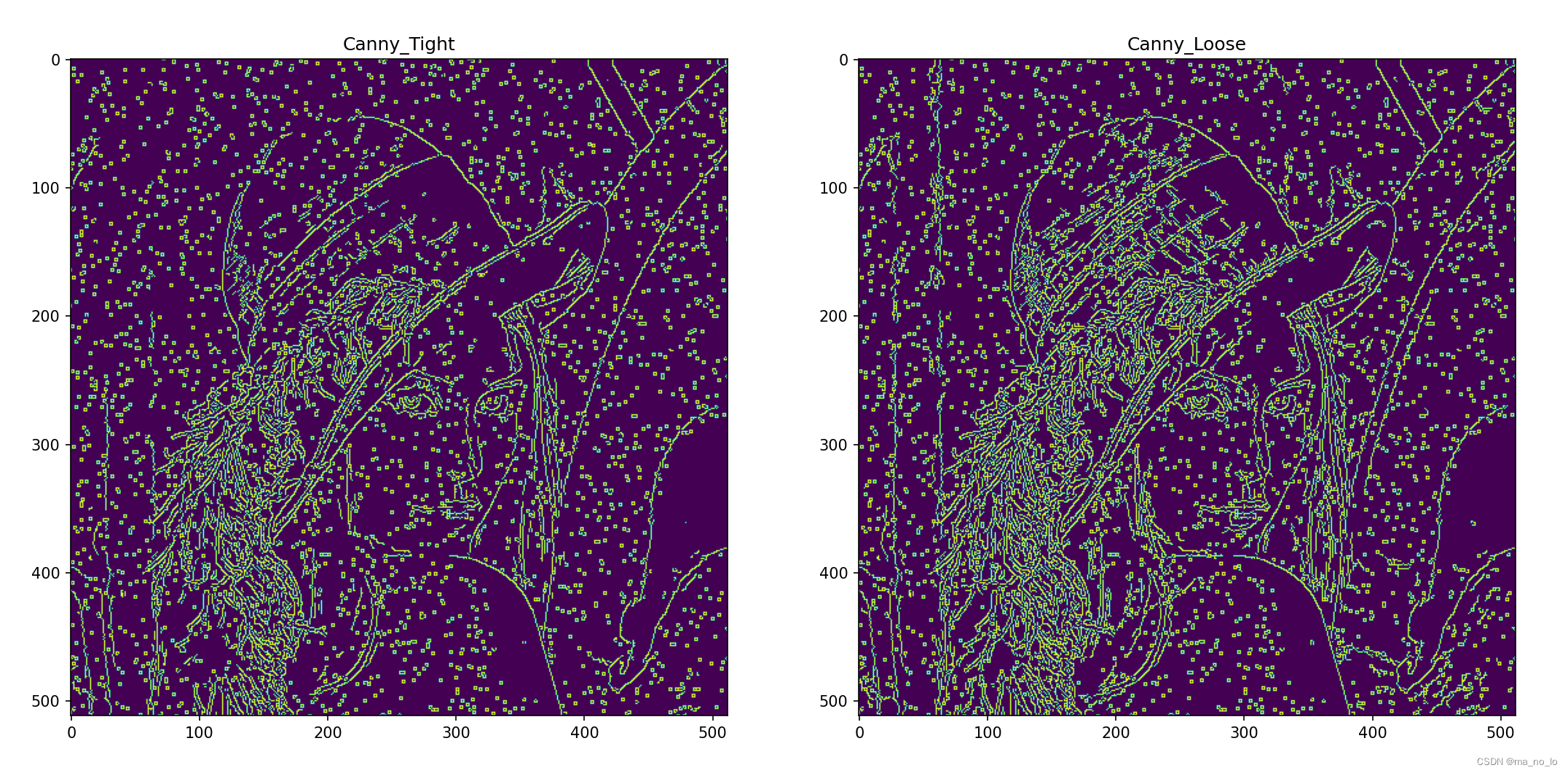
虽然可以调参来增加鲁棒性,但是我试过之后好像也没太大用,这里我们对图像进行一个预处理,使用中值滤波先处理一下,虽然会降低一定精度,但是可以有效降低噪声。
import cv2
import numpy as np
import matplotlib.pyplot as plt
if __name__ == '__main__':
img = cv2.imread("lenaNoise.png",cv2.IMREAD_GRAYSCALE)
img = cv2.medianBlur(img,5)
canny_tight = cv2.Canny(img,100,150)
canny_loose = cv2.Canny(img,5,150)
plt.subplot(121),plt.imshow(canny_tight),plt.title("Canny_Tight")
plt.subplot(122),plt.imshow(canny_loose),plt.title("Canny_Loose")
plt.show()
cv2.waitKey(0)这里我们把minval降到一个非常低的值,这是因为中值滤波把很多细节给处理掉了,为了补偿这部分,我们降低minVal来增加细节。
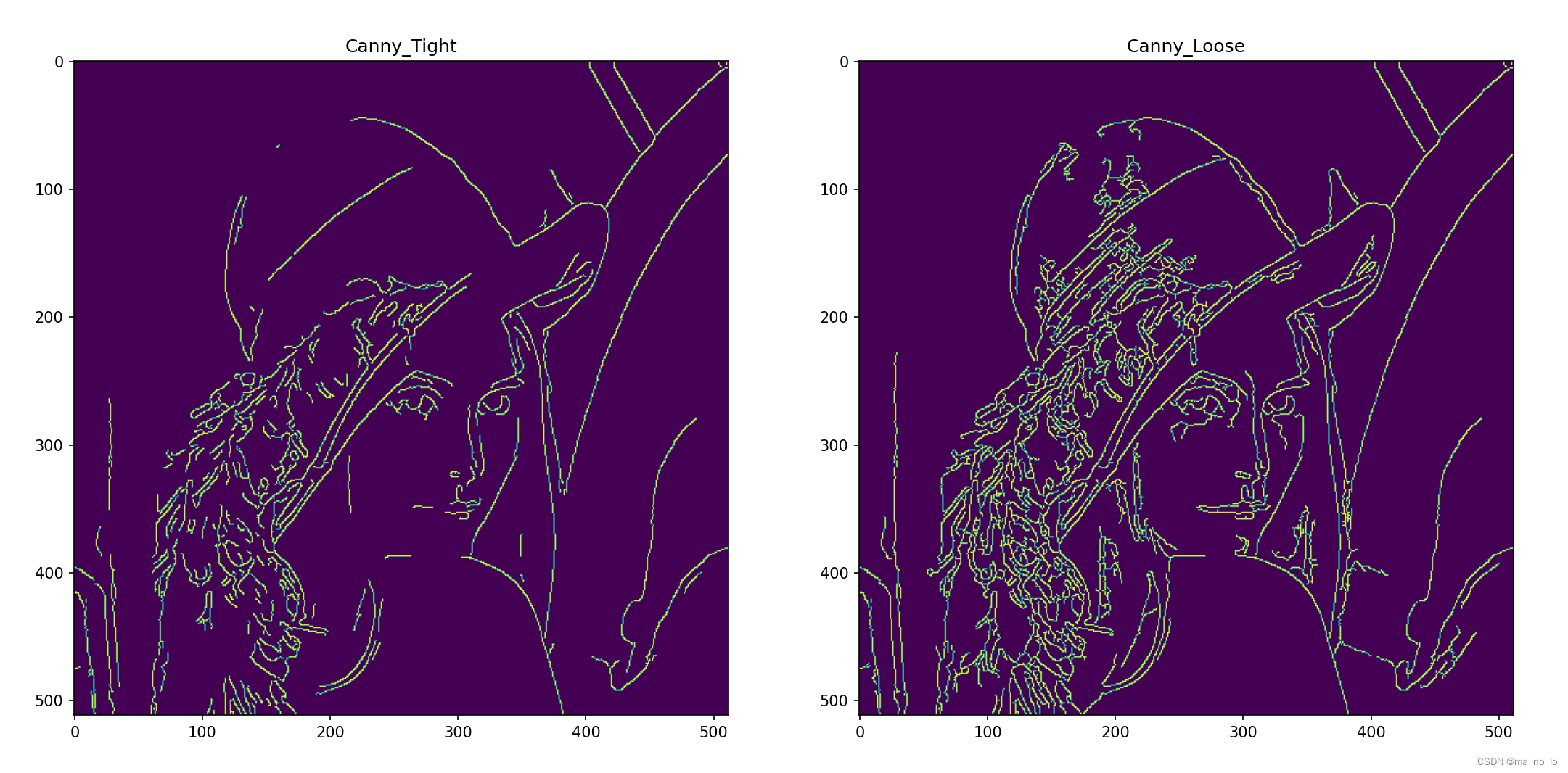
噪声很好地被清除了,同时细节也没消失太多,这满足我们的需求。















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









