







 本文介绍了双向RRT( Rapidly-exploring Random Trees)路径规划算法,通过模拟小明和妈妈互相寻找的过程,展示了双向搜索在路径规划中的优势。相比单向RRT,双向搜索在实际测试中速度提升超过两倍。此外,还提到当新生成的节点与现有树中节点距离过近时会被取消,以及优化策略——概率性地选择目标点和出发点作为采样点。文章提供了源代码链接供读者参考和学习。
本文介绍了双向RRT( Rapidly-exploring Random Trees)路径规划算法,通过模拟小明和妈妈互相寻找的过程,展示了双向搜索在路径规划中的优势。相比单向RRT,双向搜索在实际测试中速度提升超过两倍。此外,还提到当新生成的节点与现有树中节点距离过近时会被取消,以及优化策略——概率性地选择目标点和出发点作为采样点。文章提供了源代码链接供读者参考和学习。
白话RRT系列 双向RRT路径规划 更快的回家之路
1 还是小明找路回家的老问题…小明出来太久了
这次,小明的妈妈着急了,从家里出来找小明来了
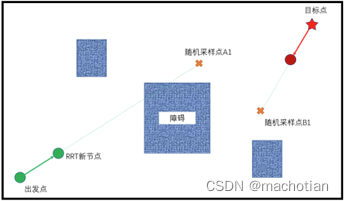
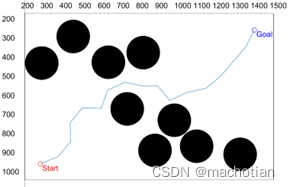
小明在出发点,妈妈在目标点,一人一步走起来啦。
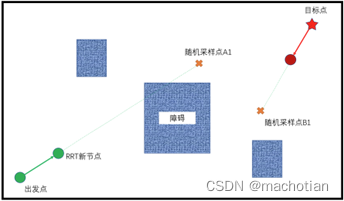
2 还是老套路
随机踩个点,沿着这个方向出发,走起来
这次你先走,下次我先走,不怕路难走
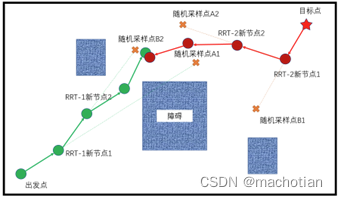
两个人找路,总会比一个人快一些呢
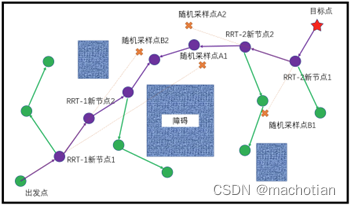
走啊走,忽然妈妈看到了小明
小明找到了妈妈
相逢的一瞬间,热泪盈眶的有咩有?
妈妈带着小明,愉快地回家了
这种相互寻找的方法,形象地称之为双向RRT方法
实测数据说明,速度快了两倍不止
总结以下:
(1) 双向寻优速度比单向快很多,t=0.067s
(2) 如果概率性的采用目标点和出发点作为随机采样点,速度还有提高空间
(3) 检验新生成的节点,如距离RRT树中其他节点太近(小于步长),则取消该节点
(4) 不废话,github上有源程序,欢迎拍砖,指导。https://github.com/Hongqing-Tian/Bidirectional-RRT-path-planning-by-Matlab/blob/main/Bi_RRT_20220518.m
(5) 图为源程序生成的路径,障碍是随机的。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









