






作者:彼方说WindyWing
链接:https://www.zhihu.com/question/347801942/answer/2259589332
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
车载网络传输数据和信号,需要因地制宜,根据实际需求来规划网络架构。就好比手机4G网络流畅时候看视频很方便,但是人非常多的时候(比如地铁上)得要5G网络的高带宽才能顺畅的上网看视频;而对于打电话这个用途来说,2G信号覆盖范围广,往往比更高级的运营商网络要好得多。
汽车上信号的传输,根据信号本身的特质,从可靠性,数据编码方式,时延,带宽等需求的不同,分配给不同的网络,常见的网络有CAN, LIN, Ethernet。
题目所说的AVB协议是说以太网音视频桥接技术(Ethernet Audio/VideoBridging),在传统以太网络的基础上,通过保障带宽(Bandwidth),限制延迟(Latency)和精确时钟同步(Time synchronization),以支持各种基于音频、视频的网络多媒体应用。在2012年,IEEE802.1 AVB更名为TSN(Time Sensitive Network),顾名思义,TSN会更加强调网络的实时性功能。在汽车领域里面,常用TSN中IEEE802.1AS协议来让不同控制器之间进行时间同步。需要注意的是TSN属于7层网络模型里面的数据链路层。
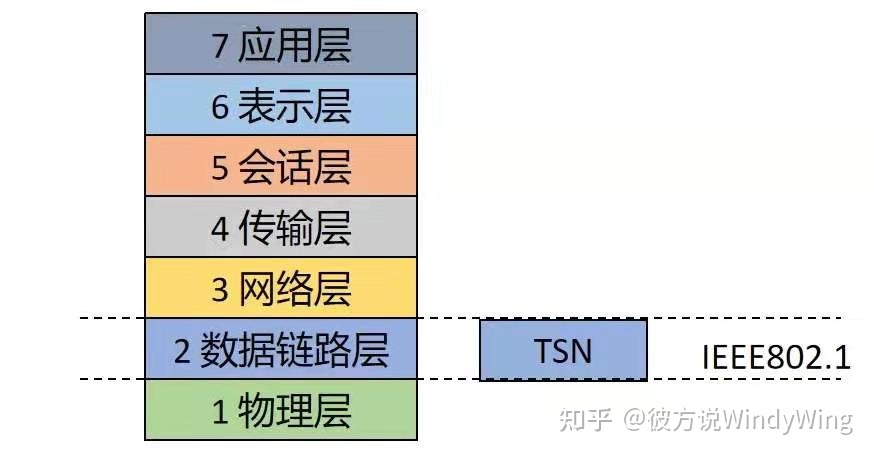
TSN协议层次
而具体的车载数据传输则基本用不到AVB/TSN协议。题目里面的雷达没有说明是常见的毫米波Radar还是高端的激光雷达Lidar,分类来说一下吧。
偏传统的智能驾驶汽车
这里单指初级L2及以下功能的智能驾驶汽车,控制器以MCU为主。摄像头和毫米波雷达信号的传输主要用CAN网络。
这里有个点要理解,摄像头的信息并不只有图像和视频信息,对于辅助驾驶应用如ACC, LKA等功能,系统需要的是根据摄像头视频信号中提取的车道线和目标信息来进行相关的决策和执行。比如一条车道线就可以表示为 y = a3x^3+a2x^2+a1x+a0的三次多项式形式,4个多项式系数,再加上x_start和x_end,用6个参数就可以表示一条车道线,而这6个参数是非常容易编码放在CAN网络配置中的,所以CAN网络传输摄像头输出的信号非常普遍。而这些信号是摄像头的视频数据,经过处理之后得到的,完成这一点需要有摄像头,视觉处理算法,和跑这个算法的芯片。将摄像头,算法和芯片集成在一起的摄像头硬件,又被称为Smart Camera。
有智驾域控制器(ADC)的车辆
随着汽车技术的发展,以Tesla为代表的新的自动驾驶方案出现了。主要特征是使用了高算力的域控制器(Autonomous Domain Controller),可以支持更多传感器数据和自动驾驶算法。对此摄像头数据的处理方式也发生了变化。
首先是不再使用SmartCamera的方式了,摄像头只是一套模组,来提供传感的数据,这些数据的处理和解析在在域控制器中进行。
蔚来ET7的摄像头模组
摄像头模组的数据,仍然不是通过AVB/TSN网络进行传输的,而是通过LVDS接口,从摄像头模组传到域控制器。整个的链路是这样的:摄像头模组里的Sensor感光获得RAW data -> 模组中ISP对RAW data进行处理 -> 模组中串行器将数据加串 -> LVDS接口把数据从模组传到域控制器(ADC)-> ADC中解串器对数据解串 -> 数据在ADC中进行处理。
为什么要用加串解串这个过程通过LVDS进行传输呢?因为sensor 和ISP 输出的原始信号如果不加串,需要8根线传输,很难传输很远,加串之后,一根线即可传输,而且能实现远距离传输。这样就方便摄像头在车上的布局了。
对于Lidar的数据,由于Lidar基本上都要配合ADC来进行使用,而Lidar的数据量又非常丰富,点云中每个点的空间距离分布信息,信号强度等信息,数据量非常大,是需要使用以太网来进行传输。不过Lidar传输通常使用传输层的TCP/UDP协议,甚至应用层的SOME/IP来使用,并不是直接使用链路层的TSN来进行传输的。
那么Lidar就不会用到TSN吗?还是需要的,因为Lidar信号的使用对准确时间的依赖度非常高,在实际使用的时候,需要用到TSN的gPTP(IEEE802.1AS)来将Lidar和关联的控制器进行精准的时间同步。同理,其他的控制器也需要这样的时间同步。
------------------
我是
,一个做过自动驾驶系统的自动驾驶工程师,热爱生活,兴趣广泛。欢迎关注我,带你了解更多有关自动驾驶,新能源汽车的事情。最近我在整理自动驾驶系统设计的心得,写在我的专栏里面,欢迎大家关注
彼方说WindyWing:自动驾驶系统入门(1)GNSS与高精度定位 - 1
彼方说WindyWing:自动驾驶系统入门(1)GNSS与高精度定位 - 2















 7462
7462











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









