










13.1 小车介绍
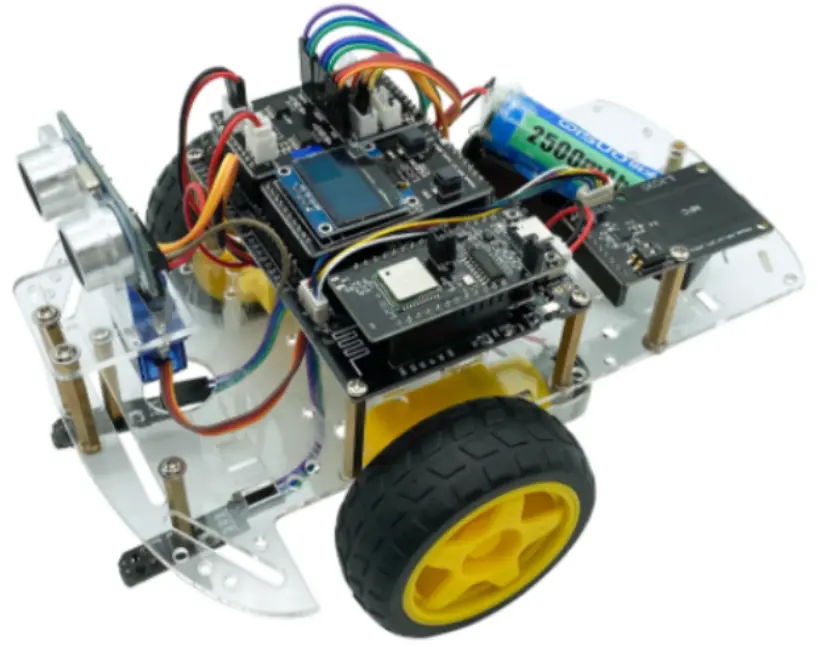
基于鸿蒙系统 + Hi3861 的WiFi小车
首先,我们得有一套WiFi小车套件,其实也是Hi3861 加上电机、循迹模块、超声波等模块。
小车安装完大概是这样:
13.2 电机驱动
我们这里先只做最简单的,驱动小车的电机,让小车跑起来。
电机的驱动板如下图,目前电机驱动芯片用的是L9110S芯片。

典型的应用电路如下图:
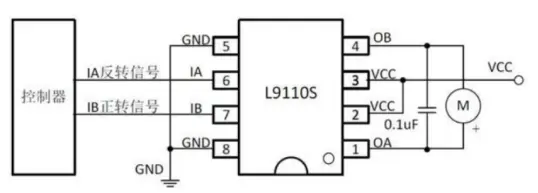
我们可以看到,如果要控制电机,我们芯片至少需要2路PWM信号,一路用于控制正转,一路用于控制反转。
然后我们小车有两个轮子,需要两个电机,所以我们需要 4 路IO口
基于鸿蒙系统 + Hi3861 的wifi小车,可以通过电脑、手机控制
需要注意,实际代码并没有使用PWM,而是直接IO控制。
void pwm_init(void)
{
IoTGpioInit(IO_NAME_GPIO_0);
IoTGpioInit(IO_NAME_GPIO_1);
IoTGpioInit(IO_NAME_GPIO_9);
IoTGpioInit(IO_NAME_GPIO_10);
//寮曡剼澶嶇敤
//hi_io_set_func(IO_NAME_GPIO_0, 0);
//hi_io_set_func(IO_NAME_GPIO_1, 0);
//hi_io_set_func(IO_NAME_GPIO_9, 0);
//hi_io_set_func(IO_NAME_GPIO_10, 0);
}
//鍋滄
void pwm_stop(void)
{
//鍏堝仠姝WM
gpio_control(GPIO0, IOT_GPIO_VALUE1);
gpio_control(GPIO1, IOT_GPIO_VALUE1);
gpio_control(GPIO9, IOT_GPIO_VALUE1);
gpio_control(GPIO10, IOT_GPIO_VALUE1);
}
void car_stop(void)
{
car_info.cur_status = car_info.go_status;
printf("pwm_stop \r\n");
pwm_stop();
}
//鍓嶈繘
void pwm_forward(void)
{
//鍏堝仠姝WM
gpio_control(GPIO0, IOT_GPIO_VALUE1);
gpio_control(GPIO1, IOT_GPIO_VALUE0);
gpio_control(GPIO9, IOT_GPIO_VALUE1);
gpio_control(GPIO10, IOT_GPIO_VALUE0);
//鍚姩A璺疨WM
//左轮
//IoTPwmStart(PWM_PORT_PWM3, 64000, 64000);
//右轮
//IoTPwmStart(PWM_PORT_PWM0, 64000, 64000);
}
void car_forward(void)
{
if(car_info.go_status != CAR_STATUS_FORWARD)
{
//鐩存帴閫€鍑?
return ;
}
if(car_info.cur_status == car_info.go_status)
{
//鐘舵€佹病鏈夊彉鍖栵紝鐩存帴鎺ㄥ嚭
return;
}
car_info.cur_status = car_info.go_status;
printf("pwm_forward \r\n");
pwm_forward();
step_count_update();
}
//鍚庨€€
void pwm_backward(void)
{
//鍏堝仠姝WM
gpio_control(GPIO0, IOT_GPIO_VALUE0);
gpio_control(GPIO1, IOT_GPIO_VALUE1);
gpio_control(GPIO9, IOT_GPIO_VALUE0);
gpio_control(GPIO10, IOT_GPIO_VALUE1);
//鍚姩A璺疨WM
//IoTPwmStart(PWM_PORT_PWM4, 64000, 64000);
//IoTPwmStart(PWM_PORT_PWM1, 64000, 64000);
}
void car_backward(void)
{
if(car_info.go_status != CAR_STATUS_BACKWARD)
{
//鐩存帴閫€鍑?
return ;
}
if(car_info.cur_status == car_info.go_status)
{
//鐘舵€佹病鏈夊彉鍖栵紝鐩存帴鎺ㄥ嚭
return;
}
car_info.cur_status = car_info.go_status;
printf("pwm_backward \r\n");
pwm_backward();
step_count_update();
}
//宸﹁浆
void pwm_left(void)
{
//鍏堝仠姝WM
gpio_control(GPIO0, IOT_GPIO_VALUE0);
gpio_control(GPIO1, IOT_GPIO_VALUE0);
gpio_control(GPIO9, IOT_GPIO_VALUE1);
gpio_control(GPIO10, IOT_GPIO_VALUE0);
//鍚姩A璺疨WM
//IoTPwmStart(PWM_PORT_PWM0, 64000, 64000);
}
void car_left(void)
{
if(car_info.go_status != CAR_STATUS_LEFT)
{
//鐩存帴閫€鍑?
return ;
}
if(car_info.cur_status == car_info.go_status)
{
//鐘舵€佹病鏈夊彉鍖栵紝鐩存帴鎺ㄥ嚭
return;
}
car_info.cur_status = car_info.go_status;
printf("pwm_left \r\n");
pwm_left();
step_count_update();
}
//鍙宠浆
void pwm_right(void)
{
//鍏堝仠姝WM
gpio_control(GPIO0, IOT_GPIO_VALUE1);
gpio_control(GPIO1, IOT_GPIO_VALUE0);
gpio_control(GPIO9, IOT_GPIO_VALUE0);
gpio_control(GPIO10, IOT_GPIO_VALUE0);
//鍚姩A璺疨WM
//IoTPwmStart(PWM_PORT_PWM3, 64000, 64000);
}
void car_right(void)
{
if(car_info.go_status != CAR_STATUS_RIGHT)
{
//鐩存帴閫€鍑?
return ;
}
if(car_info.cur_status == car_info.go_status)
{
//鐘舵€佹病鏈夊彉鍖栵紝鐩存帴鎺ㄥ嚭
return;
}
car_info.cur_status = car_info.go_status;
printf("pwm_right \r\n");
pwm_right();
step_count_update();
}
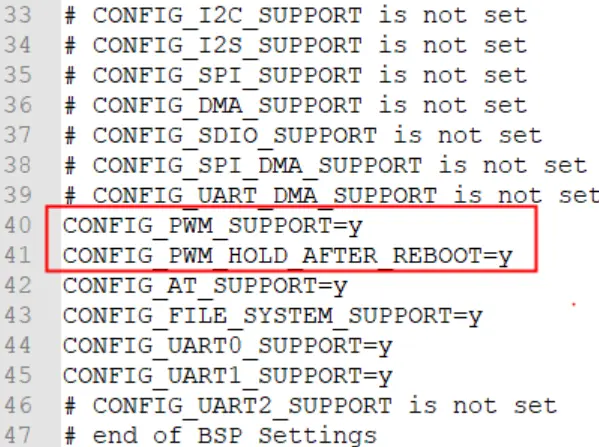
最后,要使用pwm功能,我们需要修改
device/soc/hisilicon/hi3861v100/sdk_liteos/build/config/usr_config.mk
增加这两行,这里是打开PWM功能
CONFIG_PWM_SUPPORT=y
CONFIG_PWM_HOLD_AFTER_REBOOT=y
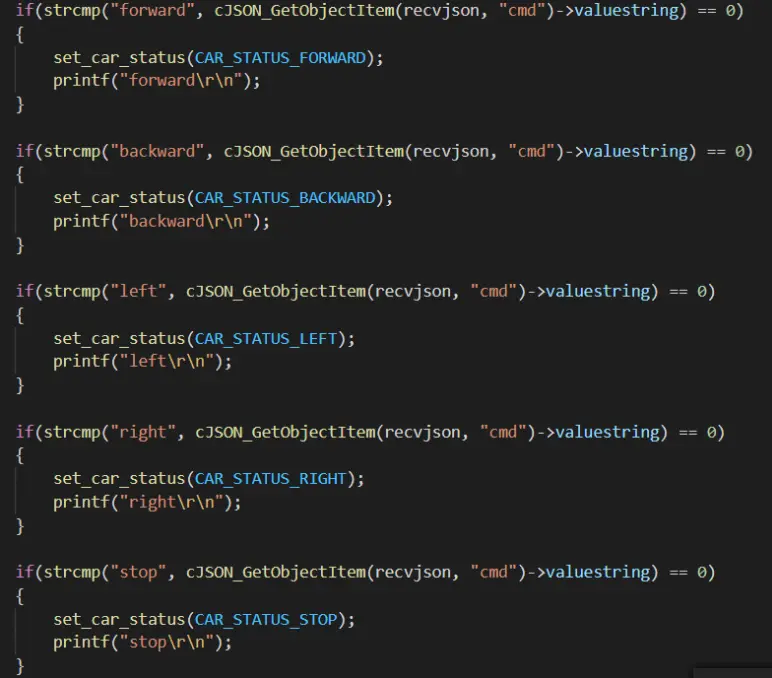
13.3 WiFi控制部分
我们在小车上面简单编写一个UDP程序,监听50001端口号。这里使用的通信格式是json,小车收到UDP数据后,解析json,并根据命令执行相应的操作,例如前进、后退、左转、右转等,代码如下:
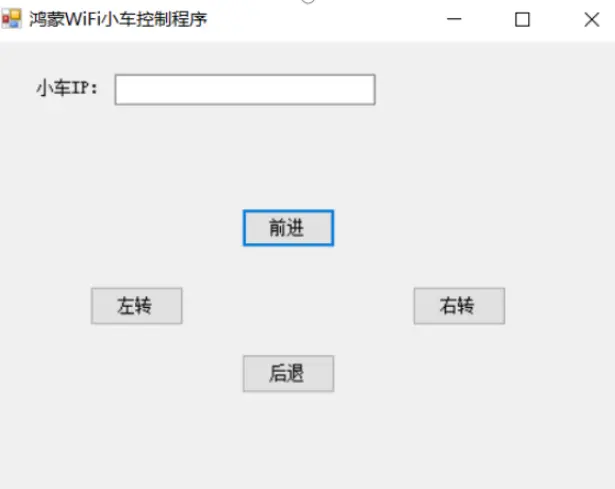
电脑端,使用C#编写一个测试程序,可以手动输入小车的IP地址,也可以不输入IP地址,这样,电脑端程序会发送广播包给小车,也可以起到控制的功能。
13.4 WiFi热点连接
注意,我这里WiFi小车固件默认连接热点的ssid是:

读者需要自己修改成自己的热点。
文件:sta_entry.c
小车的源码,C#控制端的代码均开源,大家可以自由修改,发挥自己的想象,创造出更厉害炫酷的DIY产品。
为了能让大家更好的学习鸿蒙(HarmonyOS NEXT)开发技术,这边特意整理了《鸿蒙开发学习手册》(共计890页),希望对大家有所帮助:https://qr21.cn/FV7h05
《鸿蒙开发学习手册》:
如何快速入门:https://qr21.cn/FV7h05
- 基本概念
- 构建第一个ArkTS应用
- ……

开发基础知识:https://qr21.cn/FV7h05
- 应用基础知识
- 配置文件
- 应用数据管理
- 应用安全管理
- 应用隐私保护
- 三方应用调用管控机制
- 资源分类与访问
- 学习ArkTS语言
- ……

基于ArkTS 开发:https://qr21.cn/FV7h05
- Ability开发
- UI开发
- 公共事件与通知
- 窗口管理
- 媒体
- 安全
- 网络与链接
- 电话服务
- 数据管理
- 后台任务(Background Task)管理
- 设备管理
- 设备使用信息统计
- DFX
- 国际化开发
- 折叠屏系列
- ……

鸿蒙开发面试真题(含参考答案):https://qr18.cn/F781PH

鸿蒙开发面试大盘集篇(共计319页):https://qr18.cn/F781PH
1.项目开发必备面试题
2.性能优化方向
3.架构方向
4.鸿蒙开发系统底层方向
5.鸿蒙音视频开发方向
6.鸿蒙车载开发方向
7.鸿蒙南向开发方向


















 2217
2217

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









