







前言
HarmonyOS面向万物互联时代,而万物互联涉及到了大量的硬件设备,这些硬件的离散度很高,它们的性能差异与配置差异都很大,所以这要求使用一个更灵活、功能更强大、能耗更低的驱动框架。OpenHarmony系统HDF驱动框架采用C语言面向对象编程模型构建,通过平台解耦、内核解耦,来达到兼容不同内核,统一平台底座的目的,从而帮助开发者实现驱动一次开发,多系统部署的效果。
1.HDF 驱动框架
OpenHarmony 系统 HDF 驱动框架主要由驱动基础框架、驱动程序、驱动配置文件和驱动接口这四个部分组成。
1)HDF 驱动基础框架提供统一的硬件资源管理,驱动加载管理以及设备节点管理等功能。驱动框架采用的是主从模式设计,由 Device Manager 和 Device Host 组成。Device Manager 提供了统一的驱动管理,Device Manager 启动时根据 Device Information 提供驱动设备信息加载相应的驱动 Device Host,并控制 Host 完成驱动的加载。Device Host 提供驱动运行的环境,同时预置 Host Framework 与 Device Manager 进行协同,完成驱动加载和调用。根据业务的需求 Device Host 可以有多个实例。
2)驱动程序实现驱动具体的功能,每个驱动由一个或者多个驱动程序组成,每个驱动程序都对应着一个 Driver Entry。Driver Entry 主要完成驱动的初始化和驱动接口绑定功能。
3)驱动配置文件.hcs 主要由设备信息(Device Information)和设备资源(Device Resource)组成。Device Information 完成设备信息的配置。如配置接口发布策略,驱动加载的方式等。Device Resource 完成设备资源的配置。如 GPIO 管脚、寄存器等资源信息的配置。
4)驱动接口 HDI(Hardware Driver interface )提供标准化的接口定义和实现,驱动框架提供 IO Service和IO Dispatcher 机制,使得不同部署形态下驱动接口趋于形式一致。

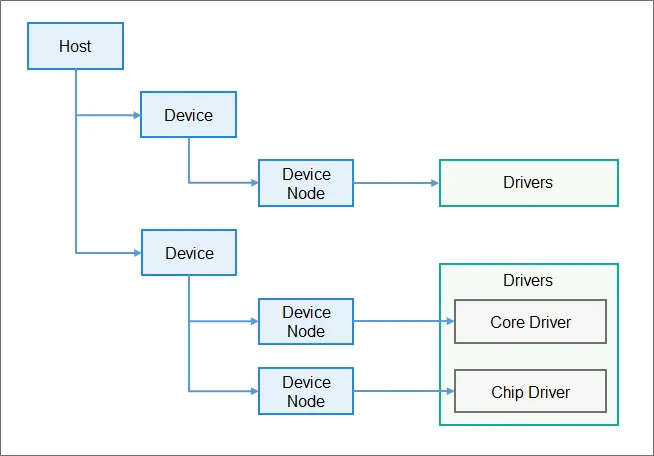
HDF框架以组件化的驱动模型作为核心设计思路,为开发者提供更精细化的驱动管理,让驱动开发和部署更加规范。HDF框架将一类设备驱动放在同一个host里面,开发者也可以将驱动功能分层独立开发和部署,支持一个驱动多个node,HDF驱动模型如下图所示:
2.HDF 驱动开发
基于HDF框架进行驱动的开发主要分为两个部分,驱动实现和驱动配置,详细开发流程如下所示:
2.1 驱动实现
驱动实现包含驱动业务代码和驱动入口注册。
2.1.1 驱动业务代码
//驱动对外提供的服务能力,将相关的服务接口绑定到HDF框架
int32_t HdfSampleDriverBind(struct HdfDeviceObject *deviceObject)
{
HDF_LOGD("Sample driver bind success");
return 0;
}
// 驱动自身业务初始的接口
int32_t HdfSampleDriverInit(struct HdfDeviceObject *deviceObject)
{
HDF_LOGD("Sample driver Init success");
return 0;
}
// 驱动资源释放的接口
void HdfSampleDriverRelease(struct HdfDeviceObject *deviceObject)  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2230
2230

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









