








1 内容介绍
In this paper, we propose a fast combined separabil-ity filter, which can selectively detect circular features such as pupils and nostrils in an image of the human face. The proposed filter is designed as a combination of multiple rectangle separability filters so that it can achieve high-speed processing and high positioning ac-curacy at the same time. The evaluation experiments using synthetic images and real face images show that the proposed filter is 70 times faster than the conven-tional circular separability filter.
2 仿真代码
function MAP = cvtCombSimpRectFilter(I,P,sh)
% Function to generate separability map for rectangular filters (vertical and horizontal)
% Input: I: integral image, obtained by using cvtIntegralImage45(X);
% P: integral image of the square pixel values, obtained by using cvtIntegralImage45(X.^2);
% sh: size of the filter
% Output: MAP: two separability maps (diagonal left and diagonal right), with size: [Height, Width, 2].
%
% If you use this code, we would appreciate if you cite the following paper(s):
%
% [1] Y. Ohkawa, C. H. Suryanto, K. Fukui,
% "Fast Combined Separability Filter for Detecting Circular Objects",
% The twelfth IAPR conference on Machine Vision Applications (MVA) pp.99-103, 2011.
%
% [2] K. Fukui, O. Yamaguchi,
% "Facial feature point extraction method based on combination of shape extraction
% and pattern matching", Systems and Computers in Japan 29 (6), pp.49-58, 1998.
%
% This code is written by Yasuhiro Ohkawa and distributed under BSD License.
% Computer Vision Laboratory (CVLAB)
% Graduate school of Systems and Information Engineering
% University of Tsukuba
% 2016
%
% Email: tsukuba.cvlab@gmail.com
% HP: http://www.cvlab.cs.tsukuba.ac.jp/
%
bh = sh*2;
bw = ceil(sh/3);
sw = ceil(sh/3);
dh =0;
dw =0;
MAP(:,:,1) = tmpFnc(I,P,bh,bw,sh,sw,dh,dw);
MAP(:,:,2) = tmpFnc(I,P,bw,bh,sw,sh,dh,dw);
end
%%
function MAP = tmpFnc(I,P,bh,bw,sh,sw,dh,dw)
MAP = zeros(size(I)-1);
[H,W] = size(MAP);
r = max([bh,bw]);
N = (2*bh+1)*(2*bw+1);
N1 = (2*sh+1)*(2*sw+1);
N2 = N-N1;
S =I((1+r:H-r)-bh,(1+r:W-r)-bw) + I((1+r:H-r)+bh+1,(1+r:W-r)+bw+1) - I((1+r:H-r)-bh,(1+r:W-r)+bw+1) -I((1+r:H-r)+bh+1,(1+r:W-r)-bw);
T =P((1+r:H-r)-bh,(1+r:W-r)-bw) + P((1+r:H-r)+bh+1,(1+r:W-r)+bw+1) - P((1+r:H-r)-bh,(1+r:W-r)+bw+1) -P((1+r:H-r)+bh+1,(1+r:W-r)-bw);
M = S./N;
Y = T./N;
St = Y - M.^2;
S1 =I((1+r:H-r)-sh+dh,(1+r:W-r)-sw+dw) + I((1+r:H-r)+sh+dh+1,(1+r:W-r)+sw+dw+1) - I((1+r:H-r)-sh+dh,(1+r:W-r)+sw+dw+1) - I((1+r:H-r)+sh+dh+1,(1+r:W-r)-sw+dw);
S2=S-S1;
M1=S1./N1;
M2=S2./N2;
Sb = ((N1*((M1-M).^2)) + (N2*((M2-M).^2)))/N;
MAP((1+r:H-r),(1+r:W-r)) = (Sb./St).*sign(M2-M1);
MAP(isnan(MAP))=0;
MAP(isinf(MAP))=0;
end
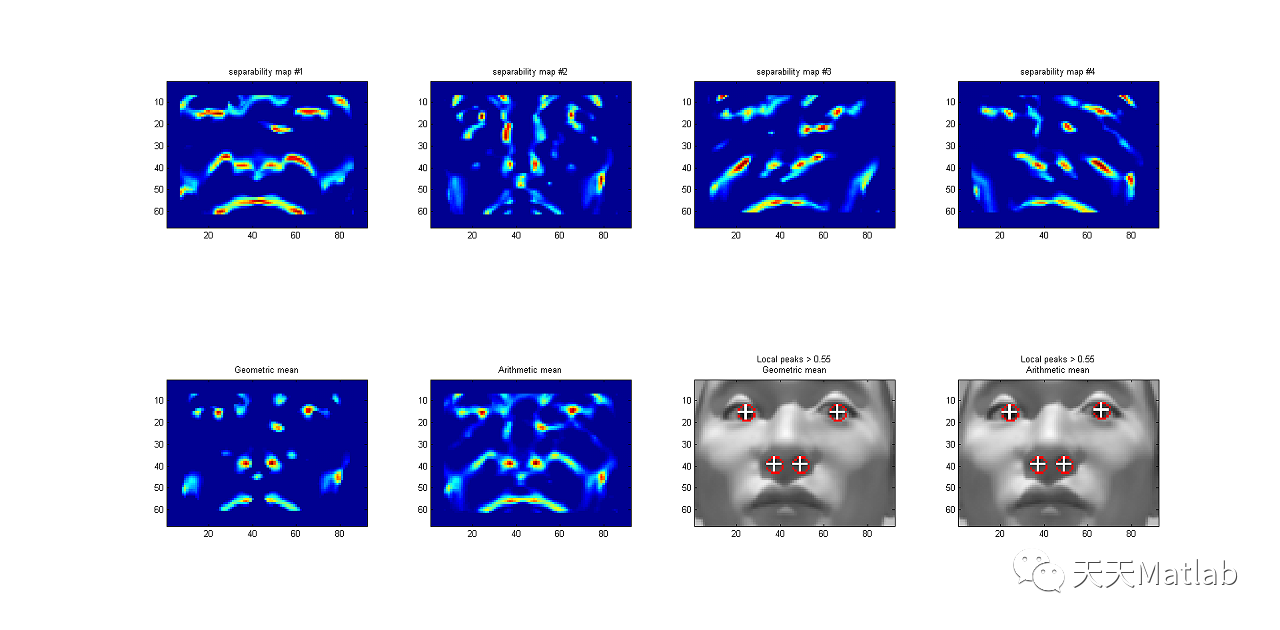
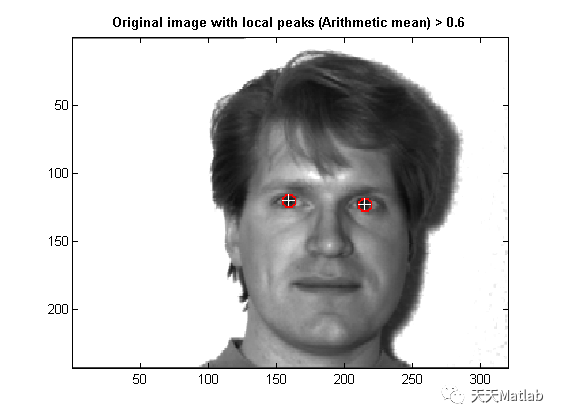
% Sample 1:
% This sample code is to demonstrate how to use the combined separability filter code
% for detecting pupils and nostrils in a very simple way.
%
% In practical situation, it is advisable to use multiple filter sizes and prepare a
% dictionary data of pupils/nostrils/others for comparing the region on each local peak.
%
% If you use this code, we would appreciate if you cite the following paper(s):
%
% [1] Y. Ohkawa, C. H. Suryanto, K. Fukui,
% "Fast Combined Separability Filter for Detecting Circular Objects",
% The twelfth IAPR conference on Machine Vision Applications (MVA) pp.99-103, 2011.
%
% [2] K. Fukui, O. Yamaguchi,
% "Facial feature point extraction method based on combination of shape extraction
% and pattern matching", Systems and Computers in Japan 29 (6), pp.49-58, 1998.
clear;
X = imread('testimages/sample1.png'); % sample1.png is a gray-scale CG generated face image
[H, W] = size(X);
S1 = cat(3,X,X,X); % used for displaying final result (Geometric mean)
S2 = cat(3,X,X,X); % used for displaying final result (Arithmetic mean)
X = double(X); % convert data type to double
I1 = cvtIntegralImage(X); % calculate integral image
P1 = cvtIntegralImage(X.^2); % calculate integral image of squared pixel value
I2 = cvtIntegralImage45(X); % calculate 45 degrees integral image
P2 = cvtIntegralImage45(X.^2); % calculate 45 degrees integral image of squared pixel value
nR = 3; % filter size parameter
nTH = 0.55; % threshold for finding local peaks
P = zeros(H,W,4); % variable to store separability map
P(:,:,1:2) = cvtCombSimpRectFilter(I1,P1,nR); % apply vertical and horizontal rectangular filters
P(:,:,3:4) = cvtCombSimpRectFilter45(I2,P2,nR); % apply diagonal left and right filters
P(P<0) = 0;
finalMap1 = prod(P(:,:,:),3).^(1/4.0);
finalMap2 = mean(P(:,:,:),3);
figure(10);clf;
for i=1:6
subplot(2,4,i);
if (i < 5)
imagesc(P(:,:,i));
axis equal tight;
title(['separability map #' num2str(i)]);
elseif (i==5)
imagesc(finalMap1);
axis equal tight;
title('Geometric mean');
elseif (i==6)
imagesc(finalMap2);
axis equal tight;
title('Arithmetic mean');
end
end
% find local peaks (Geometric mean)
PL1 = cvtFindLocalPeakX(finalMap1,1,nTH);
% draw circle and cross at each local peak with radius of the filter (nR)
for H=1:size(PL1,2)
S1 = cvtDrawCircle(S1, PL1(2,H),PL1(1,H),nR,[255,0,0],20);
S1 = cvtDrawCross(S1,PL1(2,H),PL1(1,H),nR,[255,255,255]);
end
subplot(2,4,7);
image(S1); % display original
title({['Local peaks > ' num2str(nTH)]; 'Geometric mean'});
axis equal tight;
% find local peaks (Arithmetic mean)
PL2 = cvtFindLocalPeakX(finalMap2,1,nTH);
% draw circle and cross at each local peak with radius of the filter (nR)
for H=1:size(PL2,2)
S2 = cvtDrawCircle(S2, PL2(2,H),PL2(1,H),nR,[255,0,0],20);
S2 = cvtDrawCross(S2,PL2(2,H),PL2(1,H),nR,[255,255,255]);
end
subplot(2,4,8);
image(S2); % display original with marks for the local peak
axis equal tight;
title({['Local peaks > ' num2str(nTH)]; 'Arithmetic mean'});
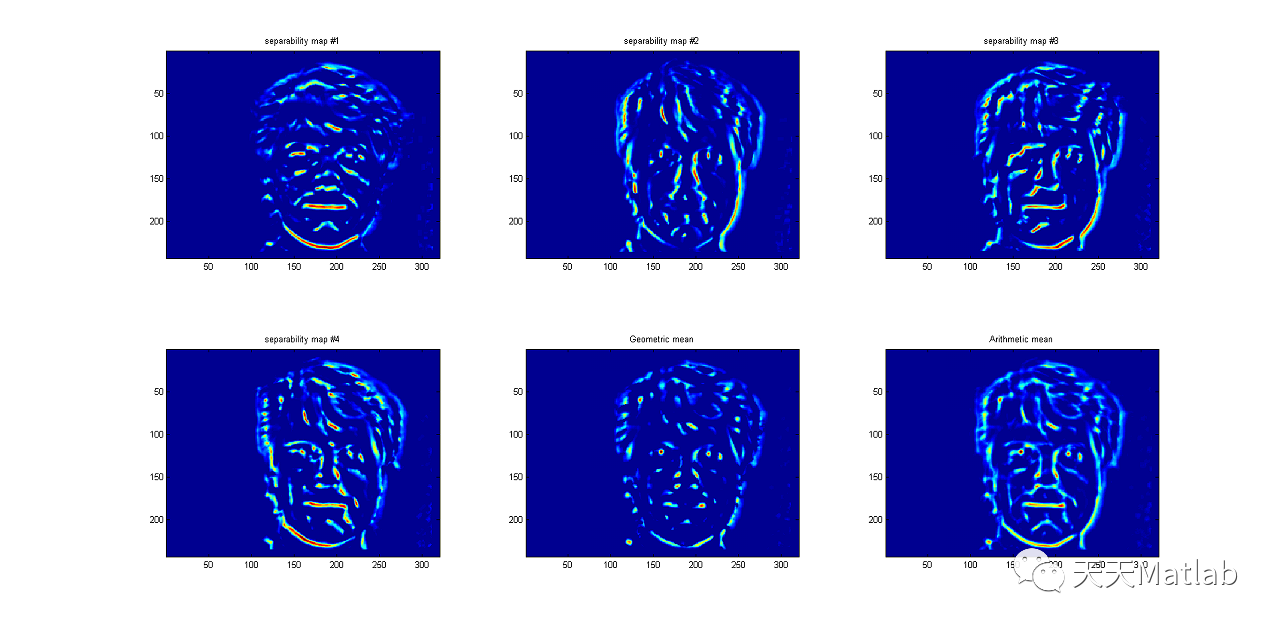
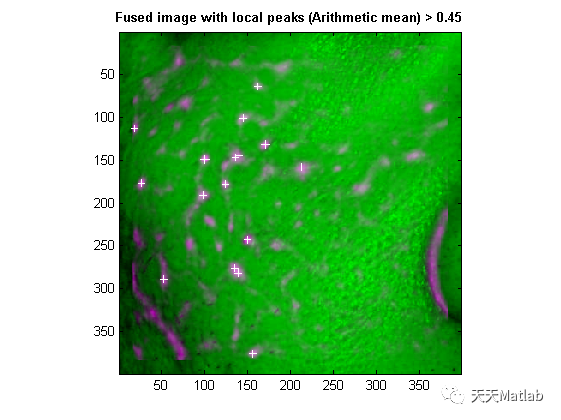
% Sample 3:
% This sample code is to demonstrate how to use the combined separability filter code
% to detect micro features on facial surface by using multi-scale filters.
%
% If you use this code, we would appreciate if you cite the following paper(s):
%
% [1] Y. Ohkawa, C. H. Suryanto, K. Fukui,
% "Fast Combined Separability Filter for Detecting Circular Objects",
% The twelfth IAPR conference on Machine Vision Applications (MVA) pp.99-103, 2011.
%
% [2] K. Fukui, O. Yamaguchi,
% "Facial feature point extraction method based on combination of shape extraction
% and pattern matching", Systems and Computers in Japan 29 (6), pp.49-58, 1998.
%
% This code is distributed under BSD License.
% Computer Vision Laboratory (CVLAB)
% Graduate school of Systems and Information Engineering
% University of Tsukuba
% 2016
%
% Email: tsukuba.cvlab@gmail.com
% HP: http://www.cvlab.cs.tsukuba.ac.jp/
%
clear;
%Read Image
Im = imread('testimages/cheek.jpg');
gr = double(rgb2gray(Im));
figure(30);clf;
image(Im);
axis equal tight;
title('Original parts of face');
%Create Integral Image
tic
I1 = cvtIntegralImage(gr);
P1 = cvtIntegralImage(gr.^2);
I2 = cvtIntegralImage45(gr);
P2 = cvtIntegralImage45(gr.^2);
%Create Separability Map
geoMap = zeros(size(gr,1),size(gr,2));
arithMap = zeros(size(gr,1),size(gr,2));
for nR = 8:2:12, %multiple scales of separability filter's size (radius)
P(:,:,1:2) = cvtCombSimpRectFilter(I1,P1,nR);
P(:,:,3:4) = cvtCombSimpRectFilter45(I2,P2,nR);
P(P<=0)=0;
geoMap_tmp= (prod(P,3)).^(1/4);
arithMap_tmp = sum(P,3)/4;
geoMap = max(geoMap, geoMap_tmp);
arithMap = max(arithMap, arithMap_tmp);
end
timerequired=toc;
fprintf('Time required: %g seconds\n',timerequired);
figure(31);clf;
subplot(2,2,1);
imagesc(geoMap);
axis equal tight;
title('Separability map (geometric mean)');
subplot(2,2,2);
imagesc(arithMap);
axis equal tight;
title('Separability map (arithmetic mean)');
subplot(2,2,3);
image(imfuse(gr,geoMap));
axis equal tight;
title('Fused image (geometric mean)');
subplot(2,2,4);
image(imfuse(gr,arithMap));
axis equal tight;
title('Fused image (arithmetic mean)');
nTH = 0.45; % threshold for local peaks
% Find and draw local peak's marks for geoMap (geometric mean)
S1 = imfuse(gr,geoMap);
PL1 = cvtFindLocalPeakX(geoMap,1,nTH);
for H=1:size(PL1,2)
% draw cross at each local peak (cross size is relative to the peak value)
S1 = cvtDrawCross(S1, PL1(2,H),PL1(1,H),round(8*PL1(3,H)),[255,255,255]);
end
figure(32);clf;
image(S1);
title(['Fused image with local peaks (Geometric mean) > ' num2str(nTH)], 'fontweight','bold');
axis equal tight;
% Find and draw local peak's marks for arithMap (arithmetic mean)
S2 = imfuse(gr,arithMap);
PL2 = cvtFindLocalPeakX(arithMap,1,nTH);
for H=1:size(PL2,2)
% draw cross at each local peak (cross size is relative to the peak value)
S2 = cvtDrawCross(S2, PL2(2,H),PL2(1,H),round(8*PL2(3,H)),[255,255,255]);
end
figure(33);clf;
image(S2);
axis equal tight;
title(['Fused image with local peaks (Arithmetic mean) > ' num2str(nTH)], 'fontweight','bold');
3 运行结果
4 参考文献
[1] Qiu C , Kotani K , Lee F , et al. An Accurate Eye Detection Method Using Elliptical Separability Filter and Combined Features[J]. Int.j.comput. netw.secur, 2009, 9(8):65-72.
[2] Y. Ohkawa, C. H. Suryanto, K. Fukui, "Fast Combined Separability Filter for Detecting Circular Objects",
The twelfth IAPR conference on Machine Vision Applications (MVA) pp.99-103, 2011.
[3] K. Fukui, O. Yamaguchi, "Facial feature point extraction method based on combination of shape extraction and pattern matching", Systems and Computers in Japan 29 (6), pp.49-58, 1998.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。
















 2715
2715











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











