







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
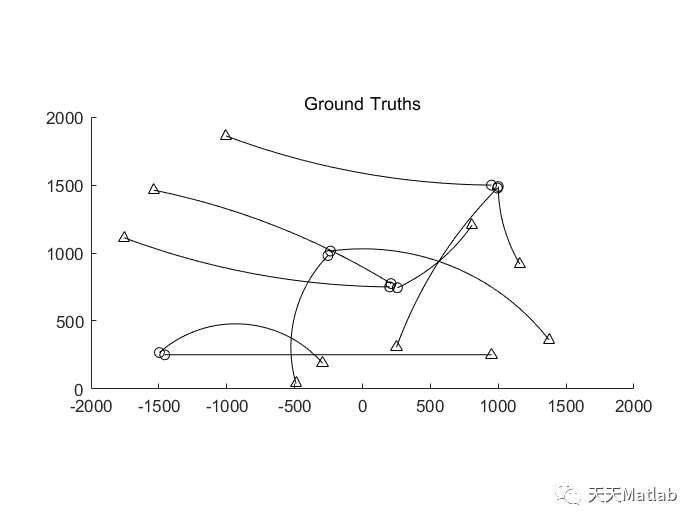
在目标跟踪领域,多目标状态估计算法是一种关键技术,它能够对多个目标在复杂环境中的状态进行准确估计。基于概率假设密度(PHD)的拓展卡尔曼滤波(EKF)是一种常用的多目标状态估计算法,本文将介绍PHD-EKF算法的实现流程。
首先,我们需要明确问题的背景和目标。在多目标跟踪中,我们的目标是根据一系列观测数据来估计目标的状态,包括位置、速度、加速度等。而PHD-EKF算法的目标是通过对目标的概率密度进行建模,来实现对多个目标状态的估计。
PHD-EKF算法的流程可以分为以下几个步骤:
-
初始化:首先,我们需要对目标的初始状态进行估计。这可以通过使用一些先验知识或者历史数据来进行初始化。
-
预测:在每个时间步骤中,我们首先进行预测步骤,即根据目标的动力学模型和先前的状态估计来预测目标的新状态。这个步骤可以使用拓展卡尔曼滤波来实现。
-
测量更新:在预测步骤之后,我们需要根据观测数据来更新目标的状态估计。这个步骤可以使用概率假设密度来实现,其中我们将目标的概率密度函数分解为一系列的高斯分布。
-
目标提取:在测量更新之后,我们需要从目标的概率密度函数中提取目标的估计状态。这可以通过计算高斯分布的期望和协方差来实现。
-
数据关联:在目标提取之后,我们需要将观测数据与目标的估计状态进行关联,以确定每个观测数据对应的目标。
-
删除冗余目标:在数据关联之后,我们可能会有一些冗余的目标估计。这些冗余目标可以通过一些准则进行删除,以提高估计的准确性。
-
重采样:最后,我们需要对目标的概率密度进行重采样,以保持概率密度的一致性。
通过以上步骤,我们可以实现对多个目标状态的准确估计。然而,需要注意的是,PHD-EKF算法在处理大量目标时可能会面临计算复杂度的问题。因此,在实际应用中,我们需要根据具体情况选择适当的算法和优化方法。
总结起来,基于概率假设密度结合拓展卡尔曼滤波的多目标状态估计算法(PHD-EKF)是一种有效的目标跟踪方法。通过对目标的概率密度进行建模和更新,我们可以实现对多个目标状态的准确估计。然而,在实际应用中需要注意算法的计算复杂度,并根据具体情况选择适当的算法和优化方法。希望本文对读者能够对PHD-EKF算法的实现流程有所了解,并在实际应用中发挥作用。
📣 部分代码
function X= gen_newstate_fn(model,Xd,V)%nonlinear state space equation (CT model)if ~isnumeric(V)if strcmp(V,'noise')V= model.B*randn(size(model.B,2),size(Xd,2));elseif strcmp(V,'noiseless')V= zeros(size(model.B,1),size(Xd,2));endendif isempty(Xd)X= [];else %modify below here for user specified transition modelX= zeros(size(Xd));%-- short handL= size(Xd,2);T= model.T;omega= Xd(5,:);tol= 1e-10;%-- pre calcssin_omega_T= sin(omega*T);cos_omega_T= cos(omega*T);a= T*ones(1,L); b= zeros(1,L);idx= find( abs(omega) > tol );a(idx)= sin_omega_T(idx)./omega(idx);b(idx)= (1-cos_omega_T(idx))./omega(idx);%-- x/y pos/velX(1,:)= Xd(1,:)+ a.*Xd(2,:)- b.*Xd(4,:);X(2,:)= cos_omega_T.*Xd(2,:)- sin_omega_T.*Xd(4,:);X(3,:)= b.*Xd(2,:) + Xd(3,:)+ a.*Xd(4,:);X(4,:)= sin_omega_T.*Xd(2,:)+ cos_omega_T.*Xd(4,:);%-- turn rateX(5,:)= Xd(5,:);%-- add scaled noiseX= X+ model.B2*V;end
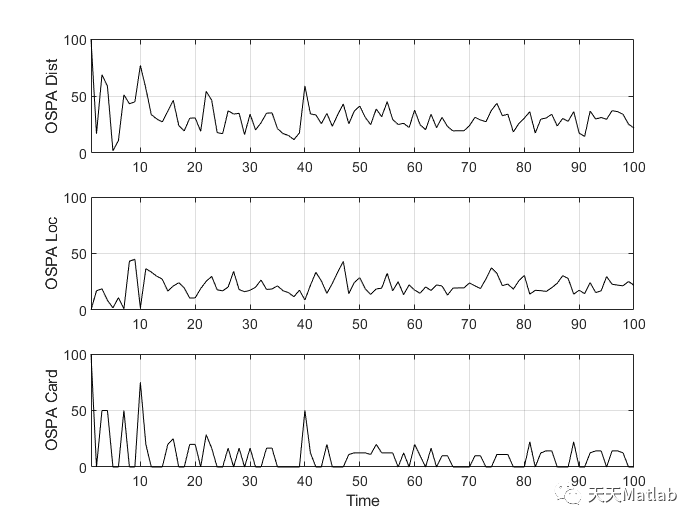
⛳️ 运行结果

🔗 参考文献
[1] 齐滨,梁国龙,张博宇,等.一种基于自适应扩展卡尔曼概率假设密度滤波器的多目标跟踪方法:CN202011097165.7[P].CN112328959A[2023-10-30].
[2] 齐滨,梁国龙,张博宇,等.一种基于自适应扩展卡尔曼概率假设密度滤波器的多目标跟踪方法:202011097165[P][2023-10-30].

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











