









Widar: Decimeter-Level Passive Tracking via Velocity Monitoring with Commodity Wi-Fi
Kun Qian, Chenshu Wu, Zheng Yang, Yunhao Liu, Kyle Jamieson
Mobihoc ’17, July 10-14, 2017, Chennai, India
Challenges and solutions
- path length change rate, or PLCR 和人体所处的位置和速度有关,所以如何建立二者联系;
- 如何根据PLCR确定运动的方向;
- 如何克服人体不同部位造成的信号反射叠加;
Contributions
First, we build a geometrical model that captures the relationships of CSI dynamics and human mobility, which underpins the feasibility of human sensing without a training phase.
Second, we design a system that simultaneously and directly tracks human moving velocity (both speed and direction) and location, which provides us richer mobility information for various applications. We envision this capability as a key enabler for future motion recognition applications. Third, we implement Widar and validate its performance on COTS hardware.
PLCR EXTRACTION
CSI处理:
- Butterworth filter (with cutting off frequency set to 2 Hz and 80 Hz respectively) 使用带通滤波器(冲击噪声被认为频率一般较高)
- 挑选子载波——we split the CSI power series into overlapped 0.5 s segments. For segments with moving targets, we select first 20 subcarriers which have larger increases in correlation coefficients relative to latest static segments. Then, we perform Principal Component Analysis (PCA) on the selected group of subcarriers and select the first PCA component for time-frequency analysis .
- 时频分析——To efficiently estimate PLCR at stable resolution across both frequency and time, we apply STFT to the first PCA component. For each segment of the PCA series, a 0.125 s Gaussian window is applied to smooth the spectrogram and a 0.5 s zero padding is added to achieve finer frequency resolution of 1 Hz. Finally, the non-overlapping spectrograms of all segments are spliced together to generate the whole PLCR spectrogram.
PLCR Extraction Algorithm
- 通过加速度和多普勒速度的对应关系,设定了最大加速度,限制了下一个segment上频谱的取值。we set the upper bound of acceleration of path length change to am = 6.4 m/s2. As the frequency resolution of the spectrogram is Δf = 1 Hz, we decimate the spectrogram to sampling rate of fs = 128 Hz.
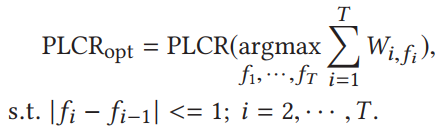
通过整个过程的最大化而提取PLCR的特征。
PLCR Sign Identification
Widar calculates cross correlation between subcarriers for time lags
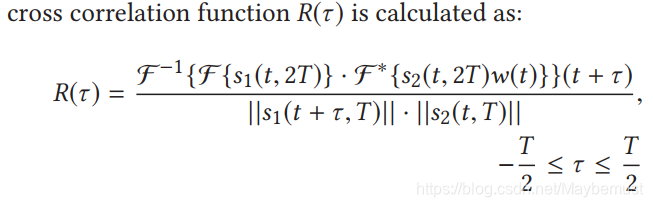
Widar accumulates time lags as PLCR is above a threshold (e.g. 0.5 m/s), and calculates the distribution of signs once PLCR decreases below the threshold or until enough time lags has been accumulated (e.g. 3 s). The signs of continuous PLCRs are opportunistically identified in the percentage of specific sign exceeds a threshold (e.g. 70%). The rationality behind such operation is that when the sign of PLCR changes, the PLCR must cross zero line and a significant decrease
in PLCR can be observed.
TRACKING VELOCITY & LOCATION
Movement Detection
行走开始的判断,因为开始行走后的correlation能量提高并行对更集中在对应于人体运动的频率上,所以首先计算the mean crosscorrelation value C and mean normalized variance σ of power distribution of frequency spectrum ,定义The movement detection indicator (MDI) 为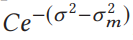 σm为过去两秒的最小值,当MDI超过一定的阈值,就判定人体开始运动。
σm为过去两秒的最小值,当MDI超过一定的阈值,就判定人体开始运动。
Initial Location Estimation
Widar first searches through the whole tracking area at a coarse resolution, identifying a location that yields the least fitting error of the trace, as the initial location. Then, Widar searches through the narrowed area around the initial location at a fine-grained resolution to refine the initial location accuracy.
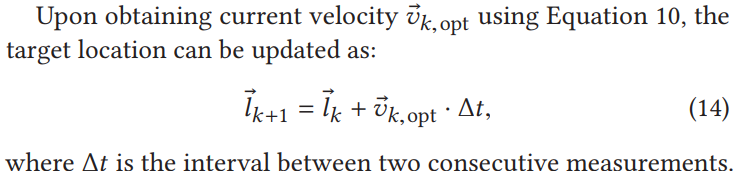
Successive Tracking
首先将初始的速度方向初始为一个很小的扰动向量,然后根据公式不断迭代计算位置
Trace Refinement
- Pseudo-calibration 过程是通过试错,然后根据总的轨迹误差进行重新运算而取得了矫正;
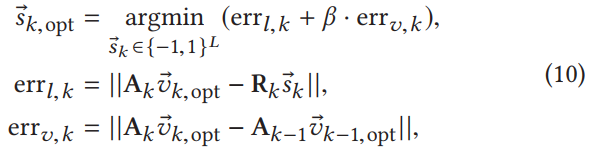
- Antenna selection Widar adopts two-round tracking for each trace segment. In the first round, least square method (Equation 9) is used to calculate optimal velocity. In the second round, a weight is applied to the least square method in order to suppress “bad” antennas:

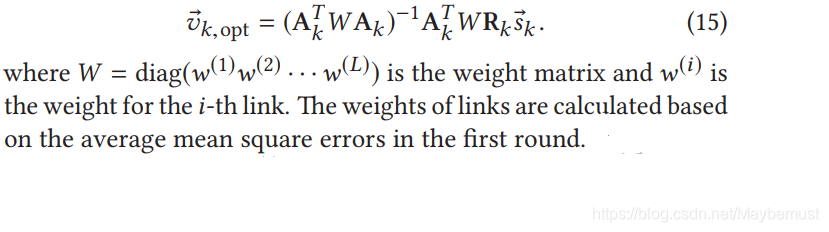
其中,first round算出来的err到w的权重对应关系如下:














 1382
1382











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









