






原文:https://blog.csdn.net/ywj447/article/details/53200521
之前都是使用键盘控制turtlebot的行走,于是想写段代码可以让turtlebot自己动起来,毕竟今后的工作是想让机器人在地图上可以实现自行路径规划到达指定的目的地。
启动turtlebot后在命令行敲入rostopic list我们可以看到当前所有的topic,如下图
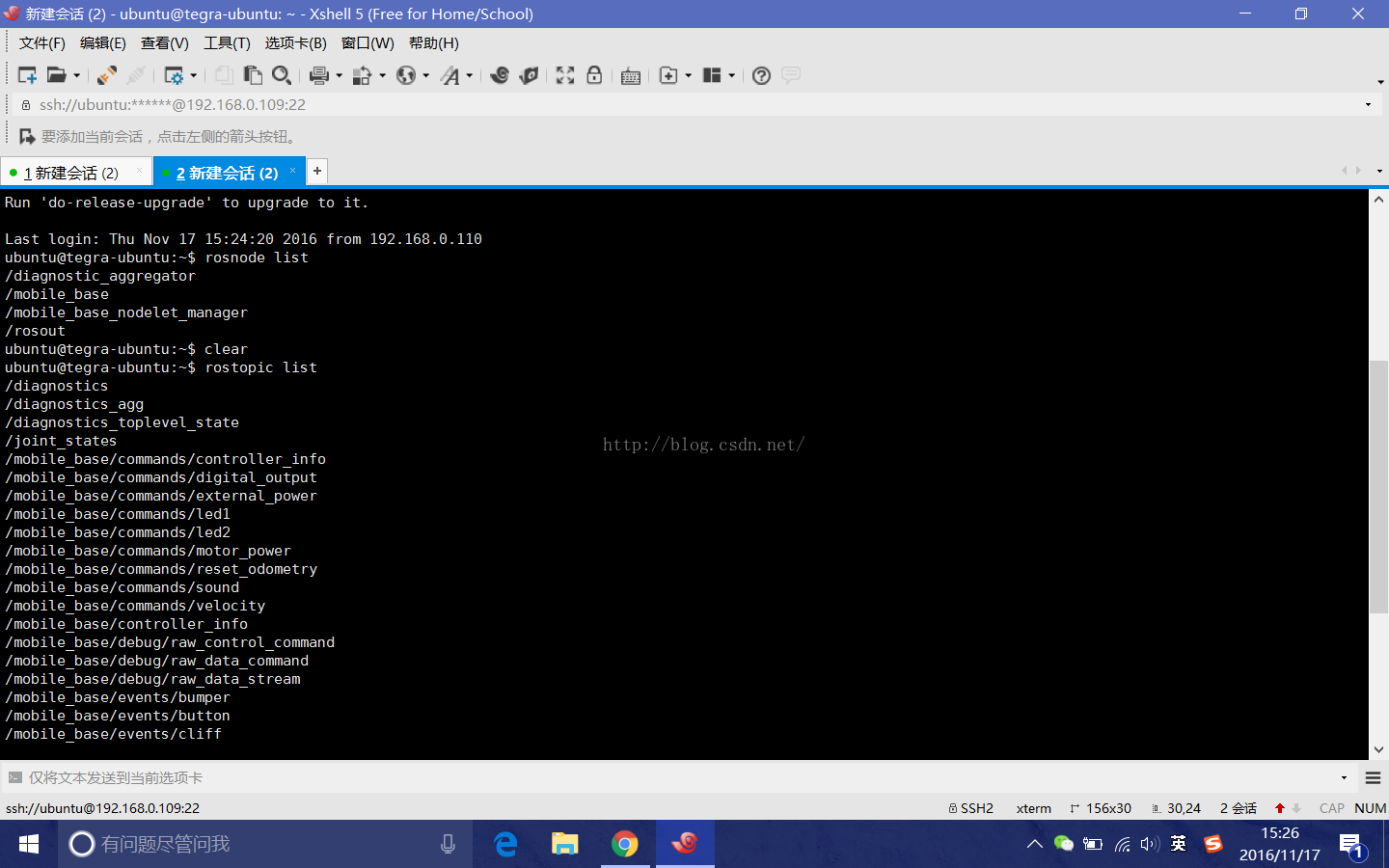
我们在使用键盘控制turtlebot的时候用到的时候cmd_vel这一个topic,然而在上图中我们并没有发现它。经过一番查阅和对比,在官方代码 kobuki_keyop/launch/keyop.launch文件中可以看到<remap from="keyop/cmd_vel" to="mobile_base/commands/velocity">,把keyop/cmd_vel映射到了mobile_base/commands/velocity上,而这个topic是有的。所以为了实现我们用代码控制turtlebot的想法,就需要我们向该topic发一个类型为geometry_msgs/Twist类型的消息,本消息中要包含运动的线速度和角速度。
分析正确后实现起来就简单多了。
首先创建程序包
catkin_create_pkg turtle_move roscpp geometry_msgs tf
下面是代码部分,在turtle_move/src中创建move_turtle_goforward.cpp程序,附上让机器人直行的代码
#include <ros/ros.h>
#include <signal.h>
#include <geometry_msgs/Twist.h>
ros::Publisher cmdVelPub;
void shutdown(int sig)
{
cmdVelPub.publish(geometry_msgs::Twist());//使机器人停止运动
ROS_INFO("move_turtle_goforward ended!");
ros::shutdown();
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "move_turtle_goforward");//初始化ROS,它允许ROS通过命令行进行名称重映射
ros::NodeHandle node;//为这个进程的节点创建一个句柄
cmdVelPub = node.advertise<geometry_msgs::Twist>(/mobile_base/commands/velocity, 1);//在/mobile_base/commands/velocity topic上发布一个geometry_msgs/Twist的消息
ros::Rate loopRate(10);//ros::Rate对象可以允许你指定自循环的频率
signal(SIGINT, shutdown);
ROS_INFO("move_turtle_goforward cpp start...");
geometry_msgs::Twist speed; // 控制信号载体 Twist message
while (ros::ok())
{
speed.linear.x = 0.1; // 设置线速度为0.1m/s,正为前进,负为后退
speed.angular.z = 0; // 设置角速度为0rad/s,正为左转,负为右转
cmdVelPub.publish(speed); // 将刚才设置的指令发送给机器人
loopRate.sleep();//休眠直到一个频率周期的时间
}
return 0;
}旋转也是同理,仅仅需要把线速度设为0,角速度设为0.5即可。
回到上层,在CMakeList.txt文件的末尾加上两句:
add_executable(move_turtle_goforward src/move_turtle_goforward.cpp)
target_link_libraries(move_turtle_goforward ${catkin_LIBRARIES})编译一下敲入
catkin_make我使用的模拟环境
roslaunch turtlebot_gazebo turtlebot_world.launch再运行我们写好的move_turtle_goforward程序
rosrun turtle_move move_turtle_goforward















 1489
1489











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









