







boost::asio::io_service bIOService;//定义一个io_service对象
boost::asio::deadline_timer timer(bIOService,boost::posix_time::seconds(5));//定义一个deadline_timer对象,绑定io_service服务 5秒后执行
timer.async_wait(boost_handler);//5秒后处理的函数
bIOService.run();//io_service运行
void boost_handler(const boost::system::error_code& ec){
TRACE("5 s.\n");
}
void boost_handler2(const boost::system::error_code& ec){
TRACE("10 s.\n");
}
void CMFC08Dlg::OnBnClickedButton2()
{
TRACE("当前线程ID,%d\n",GetCurrentThreadId());
boost::asio::io_service bIOService;//定义一个io_service对象
boost::asio::deadline_timer timer(bIOService,boost::posix_time::seconds(5));//定义一个deadline_timer对象,绑定io_service服务 5秒后执行
timer.async_wait(boost_handler);//5秒后处理的函数
boost::asio::deadline_timer timer2(bIOService,boost::posix_time::seconds(10));//定义一个deadline_timer对象,绑定io_service服务 10秒后执行
timer2.async_wait(boost_handler2);
bIOService.run();//io_service运行,这里会等待boost_handler 和 boost_handler2 调用完毕后再返回
}//由于有两个线程,所以 handler1() 和 handler2() 可以同时执行
//1.如果boost_handler2触发时,boost_handler仍在执行,则boost_handler2就会在第二个线程中执行。
//2.如果boost_handler已经终止,则 I/O 服务可以自由选择任一线程执行boost_handler2。
void boost_handler(const boost::system::error_code& ec){
TRACE("5 s.\n");
}
void boost_handler2(const boost::system::error_code& ec){
TRACE("5 s.\n");
}
boost::asio::io_service bIOService;//定义一个io_service对象
void run(){
bIOService.run();
}
void CMFC08Dlg::OnBnClickedButton2()
{
TRACE("当前线程ID,%d\n",GetCurrentThreadId());
boost::asio::deadline_timer timer(bIOService,boost::posix_time::seconds(5));//定义一个deadline_timer对象,绑定io_service服务 5秒后执行
timer.async_wait(boost_handler);//5秒后处理的函数
boost::asio::deadline_timer timer2(bIOService,boost::posix_time::seconds(5));//定义一个deadline_timer对象,绑定io_service服务 10秒后执行
timer2.async_wait(boost_handler2);
boost::thread t1(run);
boost::thread t2(run);
t1.join();
t2.join();
}//每个线程处理不同的io_service对象
void boost_handler(const boost::system::error_code& ec){
TRACE("5 s.\n");
}
void boost_handler2(const boost::system::error_code& ec){
TRACE("5 s.\n");
}
boost::asio::io_service bIOService_1;//定义一个io_service对象
boost::asio::io_service bIOService_2;//定义一个io_service对象
void run_1(){
bIOService_1.run();
}
void run_2(){
bIOService_2.run();
}
void CMFC08Dlg::OnBnClickedButton2()
{
TRACE("当前线程ID,%d\n",GetCurrentThreadId());
boost::asio::deadline_timer timer(bIOService_1,boost::posix_time::seconds(5));//定义一个deadline_timer对象,绑定io_service服务 5秒后执行
timer.async_wait(boost_handler);//5秒后处理的函数
boost::asio::deadline_timer timer2(bIOService_2,boost::posix_time::seconds(5));//定义一个deadline_timer对象,绑定io_service服务 10秒后执行
timer2.async_wait(boost_handler2);
boost::thread t1(run_1);
boost::thread t2(run_2);
t1.join();
t2.join();
}//异步访问网站
boost::asio::io_service bIOService;
boost::asio::ip::tcp::resolver bResolver(bIOService);
boost::asio::ip::tcp::socket bSock(bIOService);
boost::array<char,4096> buffer;
void read_handler(const boost::system::error_code& ec,std::size_t bytes_transferred){
//数据读取完毕的处理器
if(0!=ec){
TRACE("无法读取数据,%s\n",ec.message());
return;
}
string szData(buffer.data(),bytes_transferred);
TRACE("读取的数据,%s",szData.c_str());
bSock.async_read_some(boost::asio::buffer(buffer),read_handler);//继续又读取
}
void connect_handler(const boost::system::error_code & ec){
//连接完成后调用的处理器
if(0!=ec){
TRACE("无法连接,%s\n",ec.message());
return;
}
boost::asio::write(bSock,boost::asio::buffer("GET / HTTP 1.1\r\nHost: www.hao123.com\r\n\r\n"));//执行一个发送数据的操作
bSock.async_read_some(boost::asio::buffer(buffer),read_handler);//tcp套接字绑定异步读取数据操作,绑定异步读取处理器函数
}
void resolve_handler(const boost::system::error_code& ec,boost::asio::ip::tcp::resolver::iterator it){
//解决方案初始化完毕后的处理器
if(0!=ec){
TRACE("无法连接,%s\n",ec.message());
return;
}
bSock.async_connect(*it, connect_handler); //tcp套接字对象异步连接绑定,tcp解决方案对象,绑定连接处理器
}
void CMFC08Dlg::OnBnClickedButton2()
{
TRACE("当前线程ID,%d\n",GetCurrentThreadId());
boost::asio::ip::tcp::resolver::query bQuery("www.hao123.com","80");//构造一个query 对象
bResolver.async_resolve(bQuery,resolve_handler);//Resolver 是一个tcp 解决方案对象,绑定query对象,并且绑定解决处理器,主要用于解析域名为真实的连接IP对象
bIOService.run();//服务运行
}//异步IO服务器
boost::asio::io_service b_io_service;
boost::asio::ip::tcp::endpoint b_endpoint(boost::asio::ip::tcp::v4(), 8080);//终端端口 80,注意端口不能给占有,这里用全局变量会有问题的,最好加上try
boost::asio::ip::tcp::acceptor b_acceptor(b_io_service, b_endpoint); //接收器对象,绑定io_service,绑定终端端口
boost::asio::ip::tcp::socket b_sock(b_io_service); //套接字,绑定io_service
std::string data = "HTTP/1.1 200 OK\r\nContent-Length: 13\r\n\r\nHello, world!"; //反馈数据
void write_handler(const boost::system::error_code &ec, std::size_t bytes_transferred)
{
//发送完毕的处理器
}
void accept_handler(const boost::system::error_code &ec)
{
//接收新的连接处理器
if (0!=ec)
{
TRACE("接收处理器,%s\n",ec.message());
return ;
}
boost::asio::async_write(b_sock, boost::asio::buffer(data), write_handler);
//b_acceptor.async_accept(*(new boost::asio::ip::tcp::socket(b_io_service)), accept_handler); //可以再开一个允许套接字连接,但是async_write要发送对应的新一个套接字连接才行
}
void CMFC08Dlg::OnBnClickedButton2()
{
TRACE("当前线程ID,%d\n",GetCurrentThreadId());
b_acceptor.listen(); //监听
b_acceptor.async_accept(b_sock, accept_handler); //开始接受连接
b_io_service.run();//io_service 运行
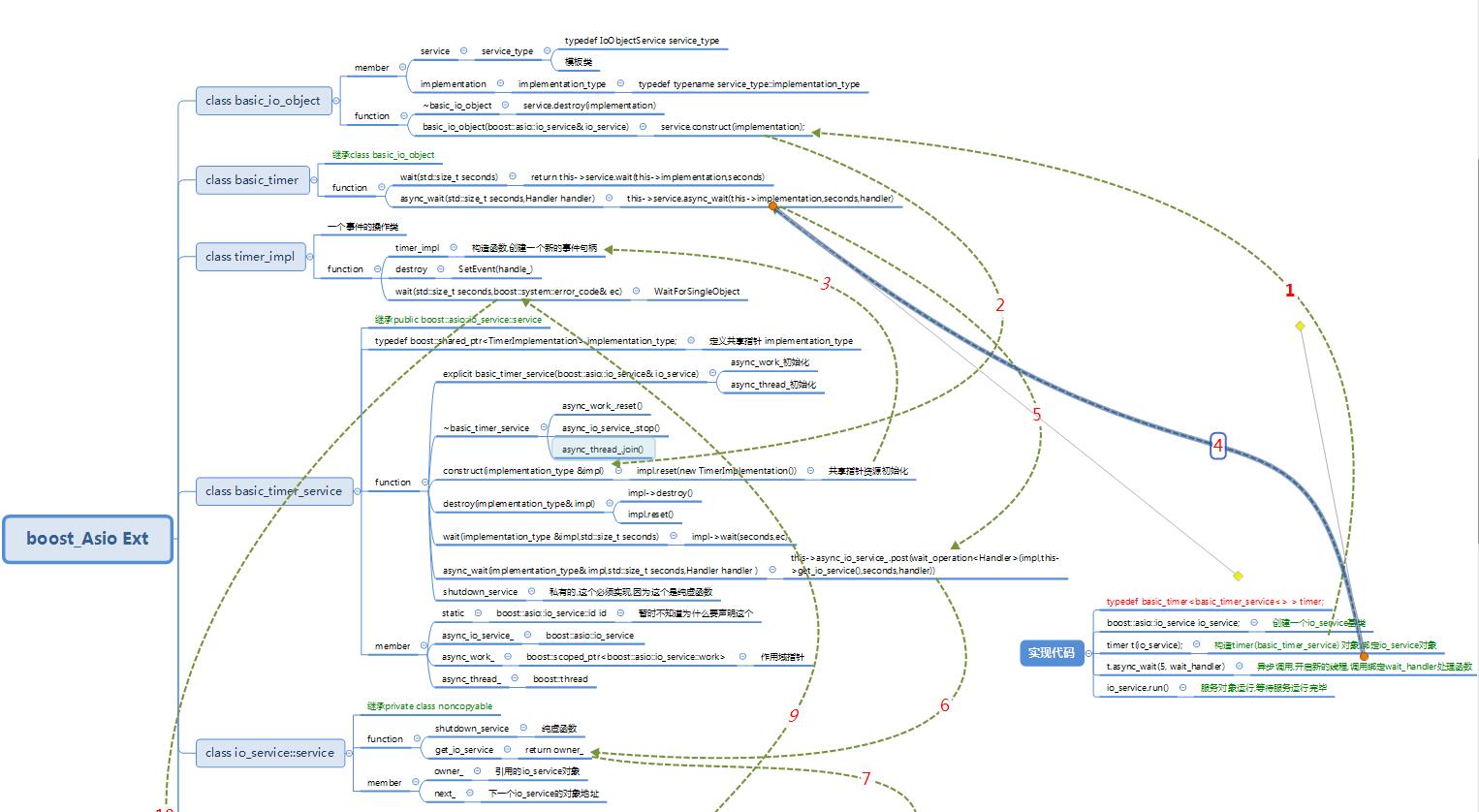
}//Boost.Asio扩展
template <typename Service>
class basic_timer:
public boost::asio::basic_io_object<Service>
{
public:
explicit basic_timer(boost::asio::io_service& bIOService)
:boost::asio::basic_io_object<Service>(bIOService)
{
}
void wait(std::size_t seconds){
//调用的时候转接到service对象的类中调用,换句话呢说也就是Service的模板类
return this->service.wait(this->implementation,seconds);
}
template <typename Handler>
void async_wait(std::size_t seconds,Handler handler){
//调用的时候转接到service对象的类中调用,换句话呢说也就是Service的模板类
this->service.async_wait(this->implementation,seconds,handler);
}
};
//时间控制器接入对象
class timer_impl
{
public:
timer_impl()
:handle_(CreateEvent(NULL,FALSE,FALSE,NULL)){
}
~timer_impl(){
CloseHandle(handle_);
}
void destroy(){
SetEvent(handle_);
}
void wait(std::size_t seconds,boost::system::error_code& ec){
DWORD res=WaitForSingleObject(handle_,seconds*1000);
if(WAIT_OBJECT_0 == res){
ec=boost::asio::error::operation_aborted;
}else
ec=boost::system::error_code();
}
protected:
private:
HANDLE handle_;//事件句柄
};
template <typename TimerImplementation = timer_impl>
class basic_timer_service
:public boost::asio::io_service::service{
public :
static boost::asio::io_service::id id;
explicit basic_timer_service(boost::asio::io_service& io_service)
:boost::asio::io_service::service(io_service),
async_work_(new boost::asio::io_service::work(async_io_service_)),//boost::scoped_ptr<boost::asio::io_service::work> async_work_,作用域指针初始化
async_thread_(boost::bind(&boost::asio::io_service::run, &async_io_service_))//boost::thread async_thread_,通过boost::bind,线程初始化运行地址以及参数
{
}
~basic_timer_service(){
async_work_.reset();//释放资源
async_io_service_.stop();//服务终止
async_thread_.join();//线程停止,个人觉得应该线程应该先终止再释放,async_work_.reset();,async_io_service_.stop(),否则线程在运行时刻,这里资源释放了则会造成影响
}
//定义共享指针,implementation_type
typedef boost::shared_ptr<TimerImplementation> implementation_type;
void construct(implementation_type &impl){
impl.reset(new TimerImplementation());//共享指针资源初始化
}
void destroy(implementation_type& impl){
impl->destroy();//调用共享指针对象的destroy函数,释放其资源(这里有一个疑问,指针析构的时候可以由于对象自己来析构)
impl.reset();//因为这里调用了reset函数
}
void wait(implementation_type &impl,std::size_t seconds){
boost::system::error_code ec;
impl->wait(seconds,ec);//调用共享指针对象的等待方法
boost::asio::detail::throw_error(ec);//最后还抛出异常?
}
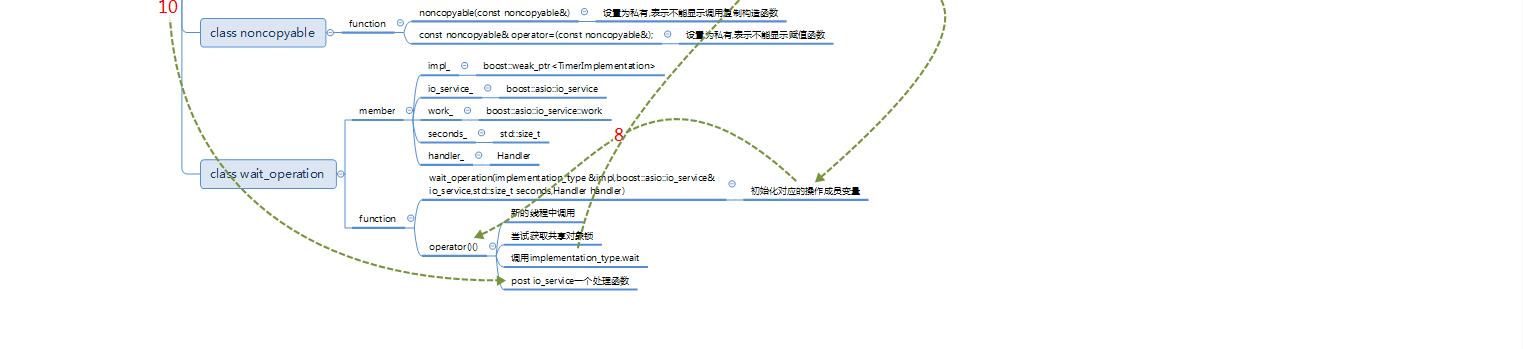
template <typename Handler>
class wait_operation{
public:
wait_operation(implementation_type &impl,boost::asio::io_service& io_service,std::size_t seconds,Handler handler)
:impl_(impl),
io_service_(io_service),
work_(io_service),
seconds_(seconds),
handler_(handler)
{
}
void operator()() const {
implementation_type impl=impl_.lock();//尝试锁定获取共享对象
if(impl){
boost::system::error_code ec;
impl->wait(seconds_,ec);//等待指定的时间
this->io_service_.post(boost::asio::detail::bind_handler(handler_,ec));//post一个异步处理函数,然后io_service在run的时候才会执行handler(wait_handler)
}else{
this->io_service_.post(boost::asio::detail::bind_handler(handler_,boost::asio::error::operation_aborted));//post一个异步处理函数,包含错误信息,,然后io_service在run的时候才会执行handler(wait_handler)
}
}
private:
boost::weak_ptr<TimerImplementation> impl_;//弱指针对象
boost::asio::io_service &io_service_;//运行的io_service对象
boost::asio::io_service::work work_;//io_service工作对象
std::size_t seconds_;//等待时间
Handler handler_;//处理器函数
};
template <typename Handler>
void async_wait(implementation_type& impl,std::size_t seconds,Handler handler ){
//异步调用时候
this->async_io_service_.post(wait_operation<Handler>(impl,this->get_io_service(),seconds,handler));
}
private:
void shutdown_service(){
}
boost::asio::io_service async_io_service_; //io_service 对象,内部的一个io_service对象
boost::scoped_ptr<boost::asio::io_service::work> async_work_; //服务工作对象
boost::thread async_thread_; //线程对象
};
template <typename TimerImplementation>
boost::asio::io_service::id basic_timer_service<TimerImplementation>::id;
void wait_handler(const boost::system::error_code &ec)
{
TRACE("5 s后调用\n");
}
typedef basic_timer<basic_timer_service<> > timer;
void CMFC08Dlg::OnBnClickedButton2()
{
boost::asio::io_service io_service; //创建一个io_service基类
timer t(io_service); //构造timer(basic_timer_service) 对象,绑定io_service对象
t.async_wait(5, wait_handler); //异步调用,绑定wait_handler处理函数,这里会创建新的线程去等待5秒
io_service.run(); //服务对象运行
}















 1401
1401

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









