






出现在ROS通信方式:参数服务器
报错原因:语法错误,“:”后应有空格
解决方法:“:”加一个空格
在这里指正 -机械工业出版社-《机器人操作系统(ROS)及仿真应用》-刘相权 张万杰 主编一书的一处错误:P80(下图标注处)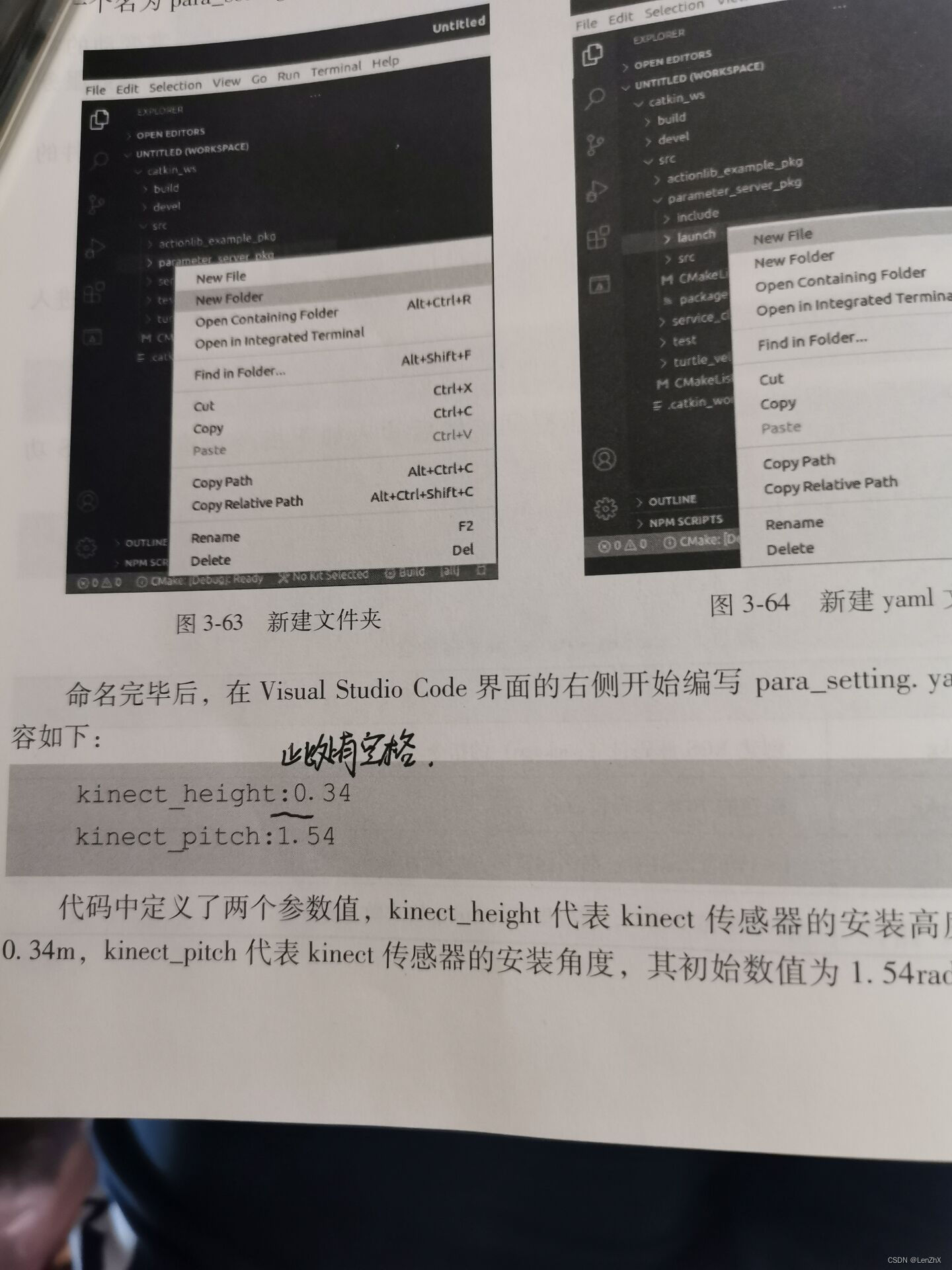
这里放上一条关于yaml文件的详解:
YAML 文件详解_yaml文件_锋声的博客-CSDN博客(博客质量一眼看上去就很好(๑•̀ㅂ•́)و✧)
出现在ROS通信方式:参数服务器
报错原因:语法错误,“:”后应有空格
解决方法:“:”加一个空格
在这里指正 -机械工业出版社-《机器人操作系统(ROS)及仿真应用》-刘相权 张万杰 主编一书的一处错误:P80(下图标注处)
这里放上一条关于yaml文件的详解:
YAML 文件详解_yaml文件_锋声的博客-CSDN博客(博客质量一眼看上去就很好(๑•̀ㅂ•́)و✧)











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



















 1032
1032





