







1. 电源默认+5v, 如果需要修改必须修改“+6V”,或者“+12V”。
2. 可调电位器,只能用“POT-HG”; 调节可用Pgup,Padn;
3. 信号源还可以是音频文件;
4. 菜单→System→set sheet size设置图纸的大小;
5. 添加网络标号,方法1:点击LBL工具,用鼠标移动到线上,出现“X”时,双击,设置网络名称。方法2, 鼠标直接放到 ,出现“X”时右键,选择防止标签。
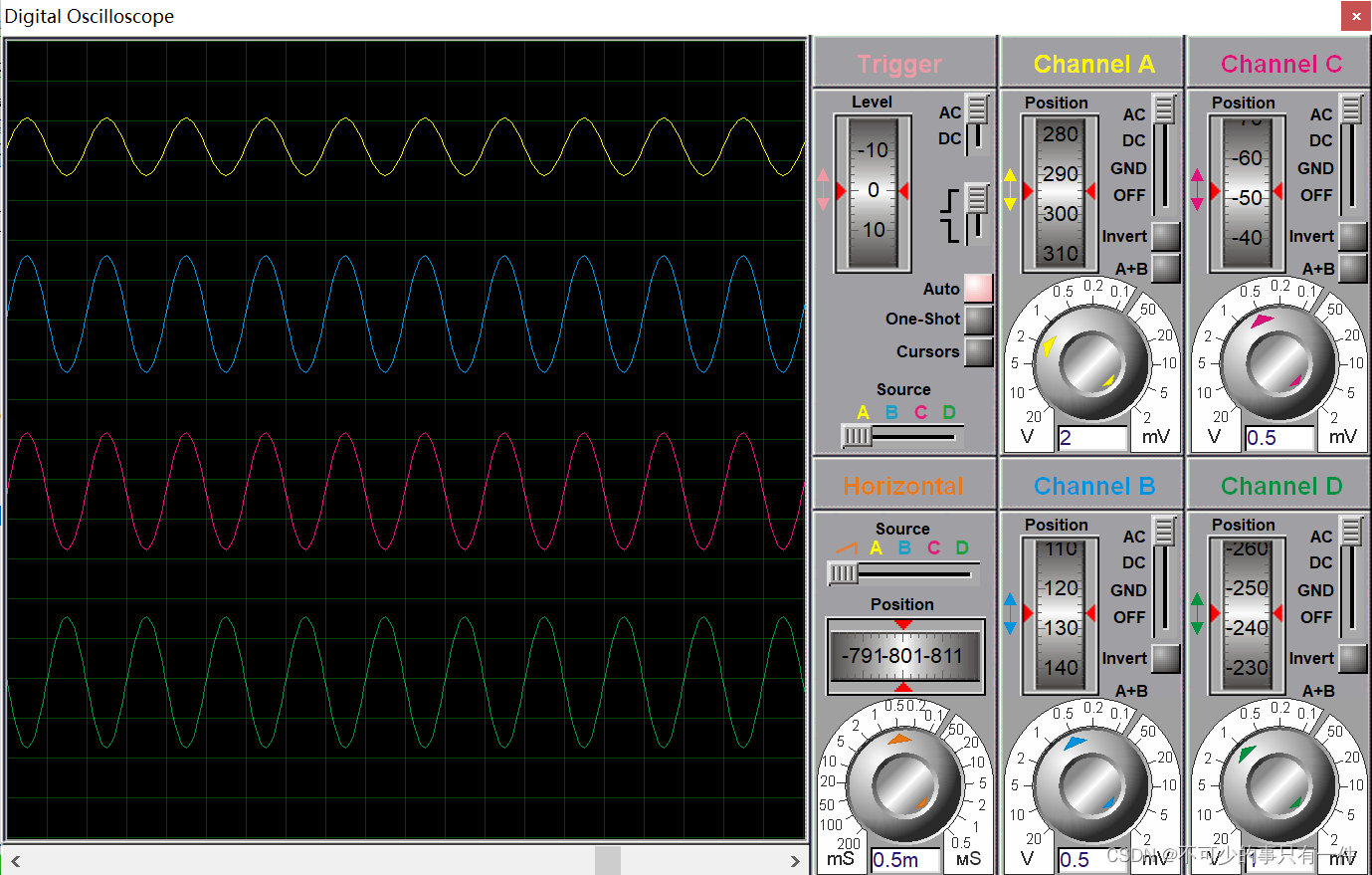
6. 仿真时,示波器窗口可通过debug→3. digital oscilloscope 查看;使用鼠标滚轮可以改变X分辨率。
7. 蜂鸣器:在proteus里有buzzer、speaker、sounder,其中的区别:
sounder是数字蜂鸣器,
speaker是用于模拟信号的仿真,可以播放语音之类的;
buzzer是直流驱动的蜂鸣器,默认驱动电压是12V,可以调节。
在proteus中使用buzzer时无正负之分,但要注意属性中的操作电压(Operating Voltage)。
8. 电流源:在器件库里搜索CCCS, 会有ACCCS, CCCS, CCCS2;
9. 交流电压源:VSINE;
10. 器件旋转需要右键,旋转
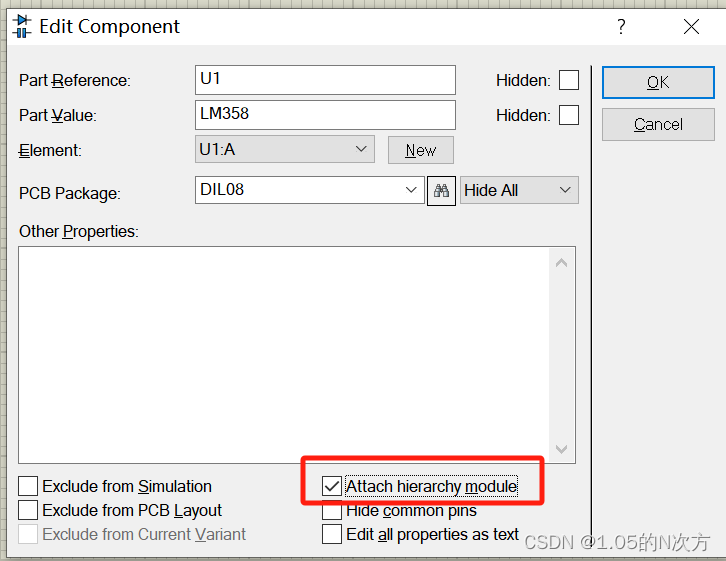
11. No model specified for U1:A. [U1:A]
12.

















 384
384

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









