






尽管智能水表正在取代老式的机械水表
但在许多地区(及老小区)
由于环境、成本等因素的限制
机械水表木得办法被替换
所以依旧需要人工手动抄表
为了实现对老式机械水表的自动识别
这篇我们讲讲2020CCF训练赛的
场景文字识别优质案例
基于DB和CRNN方法实现
真实场景下的水表读数自动识别
在我爱计算机视觉后台回复 “水表数据” 即可下载数据集。
长篇预警:约20000字(代码完整)
难度指数:★★★
实训类别:数据挖掘
知识点标签
CNN卷积神经网络>文字检测>DB 算法
CNN卷积神经网络>文字识别>CRNN 算法
场景标签
计算机视觉>图像分割>文字检测
计算机视觉>图像分类>文字识别
00
概述
任务描述
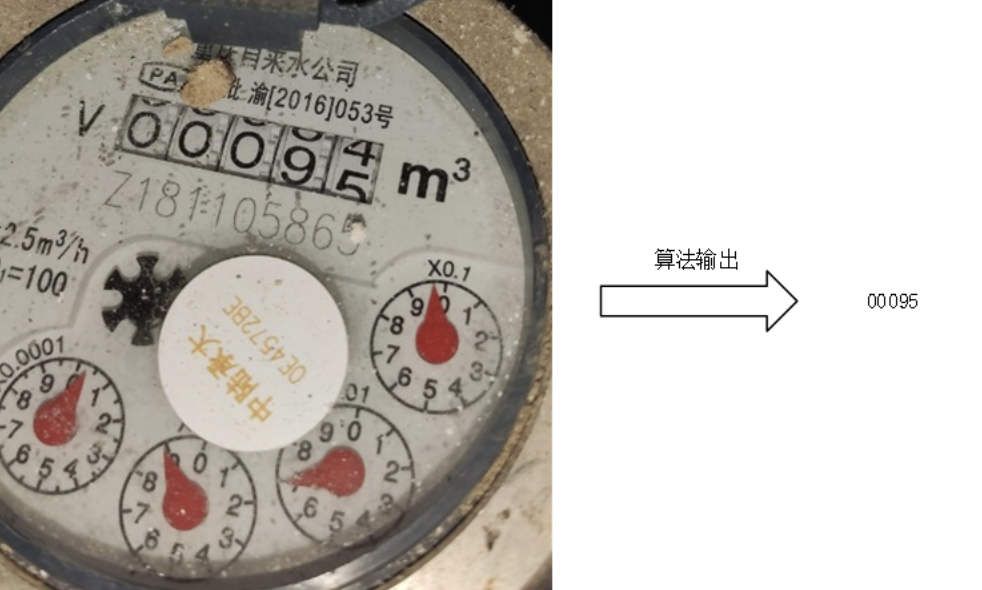
要求使用机器学习、深度学习或者光学字符识别等技术来实现对老式机械水表读数区域的自动识别,如下图所示。
数据介绍
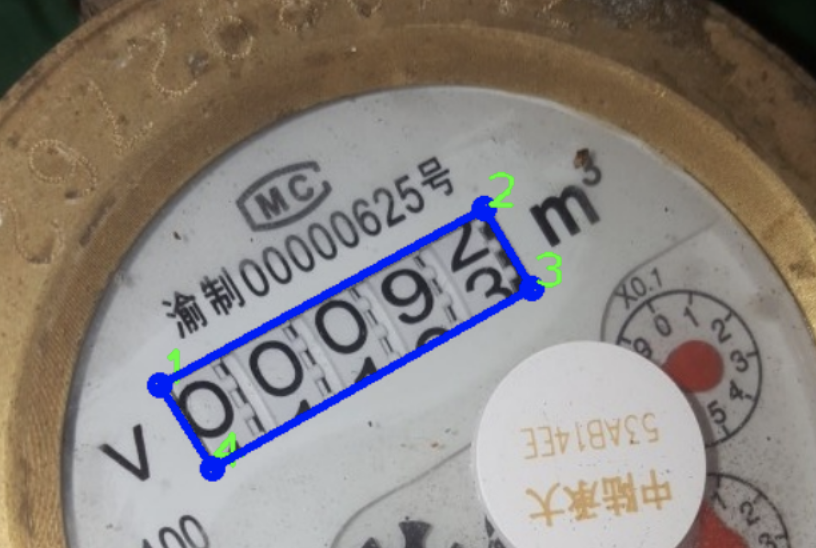
训练集包含1000张水表图片,及对应的标注答案结果;测试集包含500张待识别水表图片。训练集标注如下图所示,标签中前八个值,为水表表盘的四个角点(x1, y1, x2, y2, x3, y3, x4, y4),坐标值原点为图片的左上角,顺序为顺时针,且从左上角开始。后面的值为表盘的数值,由于最后一位出现半字符的情况,所以有两个数值。
方法概述
本方案将任务拆解为两个子任务:
1、水表读数区域准确估计;
2、对估计出的读数区域中数字准确识别。
选择文字检测模型DB实现对图像中的文字区域检测,使用文字识别模型CRNN实现字符串识别。宏观流程图如下:

数据集和工具包准备
# 解压数据集
!unzip -o 'datasets/data.zip' -d 'datasets/'
# 使用 pip 命令安装工具包
# !pip install pyclipper shapely
!pip install imgaug==0.4.0 pyclipper shapely
# 统一导入工具包
import os
import warnings
import torch
import torch.nn as nn
import torchvision
import torch.nn.functional as F
import torch.utils.data as data
import numpy as np
import cv2
import math
import pyclipper
import imgaug
import imgaug.augmenters as iaa
from PIL import Image
from shapely.geometry import Polygon
from collections import OrderedDict
from tqdm import tqdm
from torchvision import transforms
%matplotlib inline
import matplotlib
import matplotlib.pyplot as plt
# 是否使用 GPU
if torch.cuda.is_available():
device = torch.device('cuda')
else:
device = torch.device('cpu')
DEBUG = True # Debug模式可快速跑通代码,非Debug模式可得到更好的结果
# 检测和识别模型需要足够的训练迭代次数,因此DEBUG模式下几乎得不到最终有效结果
01
检测部分
1.1 参数设置
# 参数设置
class DetOptions():
def __init__(self):
self.lr = 0.004
self.max_epoch = 200
self.batch_size = 8
self.num_workers = 8
self.print_interval = 100
self.save_interval = 10
self.train_dir = 'datasets/data/train_imgs'
self.train_gt_dir = 'datasets/data/train_gts'
self.test_dir = 'datasets/data/test_imgs'
self.save_dir = 'temp/det_models/' # 保存检测模型
self.saved_model_path = 'temp/det_models/checkpoint_final' # 保存最终检测模型
self.det_res_dir = 'temp/det_res/' # 保存测试集检测结
self.thresh = 0.3 # 分割后处理阈值
self.box_thresh = 0.5 # 检测框阈值
self.max_candidates = 10 # 候选检测框数量(本数据集每张图像只有一个文本,因此可置为1)
self.test_img_short_side = 640 # 测试图像最短边长度
det_args = DetOptions()
# DEBUG 模式跑通代码
if DEBUG:
det_args.max_epoch = 1
det_args.print_interval = 1
det_args.save_interval = 1
det_args.batch_size = 2
det_args.num_workers = 0
1.2 数据处理
本小结代码为数据处理方法,包括:
数据增强变换方法,包括BaseAugment、ColorJitter、RandomCropData等,数据增强相当于扩充训练数据,可以提高模型性能;
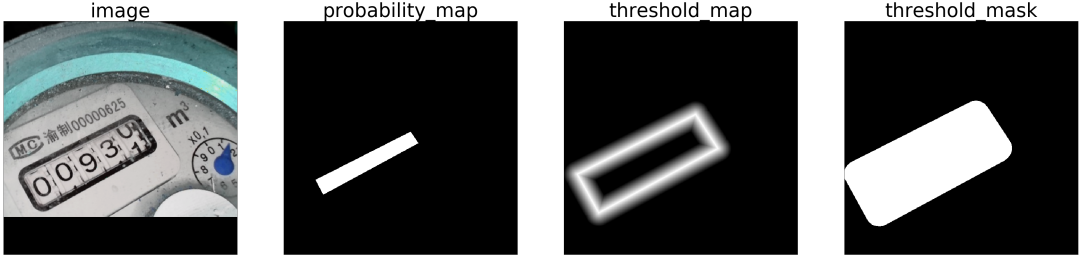
计算模型损失的 groundtruth map 生成方法,包括MakeSegDetectionData和 MakeBorderMap,分别生成DB论文中的 probability map和threshold map;
数据导入方法,ImageDataset类从数据文件夹中读取并解析数据。
'''
数据增强变换方法
'''
class BaseAugment():
'''
通过 imgaug.augmenters 进行基础变换,包括尺寸调整、翻转、旋转等
'''
def __init__(self, only_resize=False, keep_ratio=False, augmenters=None, resize_shape=None):
self.only_resize = only_resize
self.keep_ratio = keep_ratio
self.augmenter = augmenters
self.resize_shape = resize_shape
def resize_image(self, image):
origin_height, origin_width, _ = image.shape
height = self.resize_shape['height']
width = self.resize_shape['width']
if self.keep_ratio: # 是否保持图像长宽比不变
width = origin_width * height / origin_height
N = math.ceil(width / 32)
width = N * 32
image = cv2.resize(image, (width, height))
return image
def process(self, data):
image = data['image']
shape = image.shape
if self.augmenter:
aug = self.augmenter.to_deterministic()
if self.only_resize:
data['image'] = self.resize_image(image) # 只进行尺寸调整
else:
data['image'] = aug.augment_image(image) # 图像变换
self.may_augment_annotation(aug, data, shape) # 对 polygon 标注进行对应的变换
filename = data.get('filename', data.get('data_id', ''))
data.update(filename=filename, shape=shape[:2])
return data
def may_augment_annotation(self, aug, data, shape):
if aug is None:
return data
line_polys = []
for line in data['lines']:
if self.only_resize:
new_poly = [(p[0], p[1]) for p in line['poly']]
else:
new_poly = self.may_augment_poly(aug, shape, line['poly'])
line_polys.append({
'points': new_poly,
'ignore': line['text'] == '###', # 图像是否是困难样本(模糊不可辨),本任务数据集中不存在困难样本
'text': line['text'],
})
data['polys'] = line_polys
return data
def may_augment_poly(self, aug, img_shape, poly):
keypoints = [imgaug.Keypoint(p[0], p[1]) for p in poly]
keypoints = aug.augment_keypoints([imgaug.KeypointsOnImage(keypoints, shape=img_shape)])[0].keypoints
poly = [(p.x, p.y) for p in keypoints]
return poly
class ColorJitter():
'''
颜色增强,包括亮度、对比度、饱和度、色相变换
'''
def __init__(self, b=0.2, c=0.2, s=0.15, h=0.15):
self.color_jitter = torchvision.transforms.ColorJitter(
brightness=b, contrast=c, saturation=s, hue=h)
def process(self, data):
img = data['image']
image = Image.fromarray(img.astype('uint8')).convert('RGB') # 数据类型转换
img = np.array(self.color_jitter(image)).astype(np.float64)
data['image'] = img
return data
class RandomCropData():
'''
随机裁剪图像,并保证裁剪时不切割到图像中的文字区域
'''
def __init__(self, size=(640, 640)):
self.size = size
self.max_tries = 10 # 裁剪尝试的最大次数(因为存在裁剪区域太小等裁剪失败情况)
self.min_crop_side_ratio = 0.1 # 裁剪区域边长最小比例,即裁剪的图像边长与原始图像边长的比值不能小于 min_crop_side_ratio
def process(self, data):
img = data['image']
ori_img = img
ori_lines = data['polys']
all_care_polys = [line['points'] for line in data['polys'] if not line['ignore']]
crop_x, crop_y, crop_w, crop_h = self.crop_area(img, all_care_polys) # 裁剪区域的左上角坐标(x, y)以及区域宽高(w, h)
# 根据裁剪区域参数对图像进行裁剪,并填充空白以得到指定 size 的图像(在右侧或者底侧进行填充)
scale_w = self.size[0] / crop_w
scale_h = self.size[1] / crop_h
scale = min(scale_w, scale_h)
h = int(crop_h * scale)
w = int(crop_w * scale)
padimg = np.zeros((self.size[1], self.size[0], img.shape[2]), img.dtype)
padimg[:h, :w] = cv2.resize(img[crop_y:crop_y + crop_h, crop_x:crop_x + crop_w], (w, h))
img = padimg
# 根据裁剪区域参数对文字位置坐标进行转换
lines = []
for line in data['polys']:
poly = ((np.array(line['points']) - (crop_x, crop_y)) * scale).tolist()
if not self.is_poly_outside_rect(poly, 0, 0, w, h): lines.append({**line, 'points': poly}) # 不保留裁剪区域之外的文字
data['polys'] = lines
data['image'] = img
return data
def is_poly_outside_rect(self, poly, x, y, w, h):
# 判断文字polygon 是否在矩形区域外
poly = np.array(poly)
if poly[:, 0].max() < x or poly[:, 0].min() > x + w:
return True
if poly[:, 1].max() < y or poly[:, 1].min() > y + h:
return True
return False
def split_regions(self, axis):
# 返回可划切割线的连续区域
regions = []
min_axis = 0
for i in range(1, axis.shape[0]):
if axis[i] != axis[i-1] + 1:
region = axis[min_axis:i]
min_axis = i
regions.append(region)
return regions
def random_select(self, axis, max_size):
# 从一块连续区域中选择两条切割线
xx = np.random.choice(axis, size=2)
xmin = np.min(xx)
xmax = np.max(xx)
xmin = np.clip(xmin, 0, max_size - 1)
xmax = np.clip(xmax, 0, max_size - 1)
return xmin, xmax
def region_wise_random_select(self, regions, max_size):
# 从两块连续区域中选择两条切割线
selected_index = list(np.random.choice(len(regions), 2))
selected_values = []
for index in selected_index:
axis = regions[index]
xx = int(np.random.choice(axis, size=1))
selected_values.append(xx)
xmin = min(selected_values)
xmax = max(selected_values)
return xmin, xmax
def crop_area(self, img, polys):
# 裁剪区域
h, w, _ = img.shape
h_array = np.zeros(h, dtype=np.int32)
w_array = np.zeros(w, dtype=np.int32)
for points in polys:
points = np.round(points, decimals=0).astype(np.int32)
minx = np.min(points[:, 0])
maxx = np.max(points[:, 0])
w_array[minx:maxx] = 1
miny = np.min(points[:, 1])
maxy = np.max(points[:, 1])
h_array[miny:maxy] = 1
# h_array == 1 的位置表示有文本,h_array == 0 的位置表示无文本;w_array 同理
h_axis = np.where(h_array == 0)[0]
w_axis = np.where(w_array == 0)[0]
if len(h_axis) == 0 or len(w_axis) == 0:
return 0, 0, w, h
h_regions = self.split_regions(h_axis)
w_regions = self.split_regions(w_axis)
for i in range(self.max_tries):
if len(w_regions) > 1:
# 有多块可切割区域时
xmin, xmax = self.region_wise_random_select(w_regions, w)
else:
# 只有一块可切割区域时
xmin, xmax = self.random_select(w_axis, w)
if len(h_regions) > 1:
ymin, ymax = self.region_wise_random_select(h_regions, h)
else:
ymin, ymax = self.random_select(h_axis, h)
if xmax - xmin < self.min_crop_side_ratio * w or ymax - ymin < self.min_crop_side_ratio * h:
# 切割区域太小,不可取
continue
num_poly_in_rect = 0
# 保证至少有一个文字区域在切割出的区域中即可
for poly in polys:
if not self.is_poly_outside_rect(poly, xmin, ymin, xmax - xmin, ymax - ymin):
num_poly_in_rect += 1
break
if num_poly_in_rect > 0:
return xmin, ymin, xmax - xmin, ymax - ymin
return 0, 0, w, h
class MakeSegDetectionData():
'''
构造文本区域二值图(DB论文中的 probability map),以及用于计算loss的mask
'''
def __init__(self, min_text_size=8, shrink_ratio=0.4):
self.min_text_size = min_text_size
self.shrink_ratio = shrink_ratio # polygon 收缩比例
def process(self, data):
# 数据结构调整统一,方便后续操作
polygons = []
ignore_tags = []
annotations = data['polys']
for annotation in annotations:
polygons.append(np.array(annotation['points']))
ignore_tags.append(annotation['ignore'])
ignore_tags = np.array(ignore_tags, dtype=np.uint8)
filename = data.get('filename', data['data_id'])
shape = np.array(data['shape'])
data = OrderedDict(image=data['image'],
polygons=polygons,
ignore_tags=ignore_tags,
shape=shape,
filename=filename,
is_training=data['is_training'])
image = data['image']
polygons = data['polygons']
ignore_tags = data['ignore_tags']
image = data['image']
filename = data['filename']
h, w = image.shape[:2]
if data['is_training']:
polygons, ignore_tags = self.validate_polygons(polygons, ignore_tags, h, w)
gt = np.zeros((h, w), dtype=np.float32)
mask = np.ones((h, w), dtype=np.float32)
for i in range(len(polygons)):
polygon = polygons[i]
height = max(polygon[:, 1]) - min(polygon[:, 1])
width = max(polygon[:, 0]) - min(polygon[:, 0])
if ignore_tags[i] or min(height, width) < self.min_text_size: # 文本区域太小时,作为困难样本 ignore
cv2.fillPoly(mask, polygon.astype(np.int32)[np.newaxis, :, :], 0)
ignore_tags[i] = True
else:
# 收缩 polygon 并绘制 probability map
polygon_shape = Polygon(polygon)
distance = polygon_shape.area * (1 - np.power(self.shrink_ratio, 2)) / polygon_shape.length
subject = [tuple(l) for l in polygons[i]]
padding = pyclipper.PyclipperOffset()
padding.AddPath(subject, pyclipper.JT_ROUND, pyclipper.ET_CLOSEDPOLYGON)
shrinked = padding.Execute(-distance)
if shrinked == []:
cv2.fillPoly(mask, polygon.astype(np.int32)[np.newaxis, :, :], 0)
ignore_tags[i] = True
continue
shrinked = np.array(shrinked[0]).reshape(-1, 2)
cv2.fillPoly(gt, [shrinked.astype(np.int32)], 1)
if filename is None:
filename = ''
data.update(image=image,
polygons=polygons,
gt=gt, mask=mask, filename=filename)
return data
def validate_polygons(self, polygons, ignore_tags, h, w):
'''
统一polygon坐标顺序,并且ignore面积为0的polygons
'''
if len(polygons) == 0:
return polygons, ignore_tags
assert len(polygons) == len(ignore_tags)
for polygon in polygons:
polygon[:, 0] = np.clip(polygon[:, 0], 0, w - 1)
polygon[:, 1] = np.clip(polygon[:, 1], 0, h - 1)
for i in range(len(polygons)):
area = self.polygon_area(polygons[i])
if abs(area) < 1:
ignore_tags[i] = True
if area > 0:
polygons[i] = polygons[i][::-1, :] # 调整坐标顺序
return polygons, ignore_tags
def polygon_area(self, polygon):
edge = 0
for i in range(polygon.shape[0]):
next_index = (i + 1) % polygon.shape[0]
edge += (polygon[next_index, 0] - polygon[i, 0]) * (polygon[next_index, 1] + polygon[i, 1])
return edge / 2.
class MakeBorderMap():
'''
构造文本边界二值图(DB论文中的 threshold map),以及用于计算loss的mask
'''
def __init__(self, shrink_ratio=0.4, thresh_min=0.3, thresh_max=0.7):
self.shrink_ratio = shrink_ratio
self.thresh_min = thresh_min
self.thresh_max = thresh_max
warnings.simplefilter("ignore")
def process(self, data):
image = data['image']
polygons = data['polygons']
ignore_tags = data['ignore_tags']
canvas = np.zeros(image.shape[:2], dtype=np.float32)
mask = np.zeros(image.shape[:2], dtype=np.float32)
for i in range(len(polygons)):
if ignore_tags[i]:
continue
self.draw_border_map(polygons[i], canvas, mask=mask) # 绘制 border map
canvas = canvas * (self.thresh_max - self.thresh_min) + self.thresh_min
data['thresh_map'] = canvas
data['thresh_mask'] = mask
return data
def draw_border_map(self, polygon, canvas, mask):
polygon = np.array(polygon)
assert polygon.ndim == 2
assert polygon.shape[1] == 2
polygon_shape = Polygon(polygon)
distance = polygon_shape.area * (1 - np.power(self.shrink_ratio, 2)) / polygon_shape.length
subject = [tuple(l) for l in polygon]
padding = pyclipper.PyclipperOffset()
padding.AddPath(subject, pyclipper.JT_ROUND, pyclipper.ET_CLOSEDPOLYGON)
padded_polygon = np.array(padding.Execute(distance)[0])
cv2.fillPoly(mask, [padded_polygon.astype(np.int32)], 1.0)
xmin = padded_polygon[:, 0].min()
xmax = padded_polygon[:, 0].max()
ymin = padded_polygon[:, 1].min()
ymax = padded_polygon[:, 1].max()
width = xmax - xmin + 1
height = ymax - ymin + 1
polygon[:, 0] = polygon[:, 0] - xmin
polygon[:, 1] = polygon[:, 1] - ymin
xs = np.broadcast_to(np.linspace(0, width - 1, num=width).reshape(1, width), (height, width))
ys = np.broadcast_to(np.linspace(0, height - 1, num=height).reshape(height, 1), (height, width))
distance_map = np.zeros((polygon.shape[0], height, width), dtype=np.float32)
for i in range(polygon.shape[0]):
j = (i + 1) % polygon.shape[0]
absolute_distance = self.distance(xs, ys, polygon[i], polygon[j])
distance_map[i] = np.clip(absolute_distance / distance, 0, 1)
distance_map = distance_map.min(axis=0)
xmin_valid = min(max(0, xmin), canvas.shape[1] - 1)
xmax_valid = min(max(0, xmax), canvas.shape[1] - 1)
ymin_valid = min(max(0, ymin), canvas.shape[0] - 1)
ymax_valid = min(max(0, ymax), canvas.shape[0] - 1)
canvas[ymin_valid:ymax_valid + 1, xmin_valid:xmax_valid + 1] = np.fmax(
1 - distance_map[
ymin_valid-ymin:ymax_valid-ymax+height,
xmin_valid-xmin:xmax_valid-xmax+width],
canvas[ymin_valid:ymax_valid + 1, xmin_valid:xmax_valid + 1])
def distance(self, xs, ys, point_1, point_2):
# 计算图像中的点到 文字polygon 边界的距离
height, width = xs.shape[:2]
square_distance_1 = np.square(
xs - point_1[0]) + np.square(ys - point_1[1])
square_distance_2 = np.square(
xs - point_2[0]) + np.square(ys - point_2[1])
square_distance = np.square(
point_1[0] - point_2[0]) + np.square(point_1[1] - point_2[1])
cosin = (square_distance - square_distance_1 - square_distance_2) / (2 * np.sqrt(square_distance_1 * square_distance_2))
square_sin = 1 - np.square(cosin)
square_sin = np.nan_to_num(square_sin)
result = np.sqrt(square_distance_1 * square_distance_2 * square_sin / square_distance)
result[cosin < 0] = np.sqrt(np.fmin(square_distance_1, square_distance_2))[cosin < 0]
return result
class NormalizeImage():
'''
将图像元素值归一化到[-1, 1]
'''
RGB_MEAN = np.array([122.67891434, 116.66876762, 104.00698793])
def process(self, data):
assert 'image' in data, '`image` in data is required by this process'
image = data['image']
image -= self.RGB_MEAN
image /= 255.
image = torch.from_numpy(image).permute(2, 0, 1).float()
data['image'] = image
return data
@classmethod
def restore(self, image):
image = image.permute(1, 2, 0).to('cpu').numpy()
image = image * 255.
image += self.RGB_MEAN
image = image.astype(np.uint8)
return image
class FilterKeys():
'''
过滤掉后续不需要的键值对
'''
def __init__(self, superfluous):
self.superfluous_keys = set(superfluous)
def process(self, data):
for key in self.superfluous_keys:
del data[key]
return data
# 训练集数据处理
train_processes = [
BaseAugment(only_resize=False, keep_ratio=False,
augmenters=iaa.Sequential([
iaa.Fliplr(0.5), # 水平翻转
iaa.Affine(rotate=(-10, 10)), # 旋转
iaa.Resize((0.5, 3.0)) # 尺寸调整
])),
ColorJitter(), # 颜色增强
RandomCropData(size=[640, 640]), # 随机裁剪
MakeSegDetectionData(), # 构造 probability map
MakeBorderMap(), # 构造 threshold map
NormalizeImage(), # 归一化
FilterKeys(superfluous=['polygons', 'filename', 'shape', 'ignore_tags', 'is_training']), # 过滤多余元素
]
'''
数据集导入方法
'''
# dataset
class ImageDataset(data.Dataset):
def __init__(self, data_dir=None, gt_dir=None, is_training=True, processes=None):
self.data_dir = data_dir
self.gt_dir = gt_dir
self.is_training = is_training
self.processes = processes
self.image_paths = []
self.gt_paths = []
image_list = os.listdir(self.data_dir)
self.image_paths = [self.data_dir + '/' + t for t in image_list]
self.gt_paths = [self.gt_dir + '/' + t.replace('.jpg', '.txt') for t in image_list]
self.targets = self.load_ann() # 导入标注信息
def load_ann(self):
res = []
for gt in self.gt_paths:
lines = []
reader = open(gt, 'r').readlines()
for line in reader:
item = {}
line = line.strip().split()
poly = np.array(list(map(float, line[:8]))).reshape((-1, 2)).tolist()
item['poly'] = poly
item['text'] = line[8] # 前8为 polygon 坐标,第9是文本字符串
lines.append(item)
res.append(lines)
return res
def __getitem__(self, index):
if index >= len(self.image_paths):
index = index % len(self.image_paths)
data = {}
image_path = self.image_paths[index]
img = cv2.imread(image_path, cv2.IMREAD_COLOR).astype('float32')
target = self.targets[index]
data['filename'] = image_path.split('/')[-1]
data['data_id'] = image_path.split('/')[-1]
data['image'] = img
data['lines'] = target
data['is_training'] = self.is_training
if self.processes is not None:
for data_process in self.processes: # 做数据增强
data = data_process.process(data)
return data
def __len__(self):
return len(self.image_paths)
对经过数据处理之后模型的输入和标签进行可视化。
# 数据处理可视化
train_dataset = ImageDataset(data_dir=det_args.train_dir, gt_dir=det_args.train_gt_dir, is_training=True, processes=train_processes)
train_dataloader = data.DataLoader(train_dataset, batch_size=2, num_workers=0, shuffle=True, drop_last=False)
batch = next(iter(train_dataloader)) # 获取一个 batch
# 画图
plt.figure(figsize=(60,60))
image = NormalizeImage.restore(batch['image'][0])
plt.subplot(141)
plt.title('image', fontdict={'size': 60})
plt.xticks([])
plt.yticks([])
plt.imshow(image)
probability_map = (batch['gt'][0].to('cpu').numpy() * 255).astype(np.uint8)
plt.subplot(142)
plt.title('probability_map', fontdict={'size': 60})
plt.xticks([])
plt.yticks([])
plt.imshow(probability_map, cmap='gray')
threshold_map = (batch['thresh_map'][0].to('cpu').numpy() * 255).astype(np.uint8)
plt.subplot(143)
plt.title('threshold_map', fontdict={'size': 60})
plt.xticks([])
plt.yticks([])
plt.imshow(threshold_map, cmap='gray')
threshold_mask = (batch['thresh_mask'][0].to('cpu').numpy() * 255).astype(np.uint8)
plt.subplot(144)
plt.title('threshold_mask', fontdict={'size': 60})
plt.xticks([])
plt.yticks([])
plt.imshow(threshold_mask, cmap='gray')
1.2 损失函数
本小节代码为损失计算,包括:
BCE loss 计算 probability map 损失
MaskL1Loss 计算 threshold map 损失
DiceLoss 计算 approximate binary map 损失 DiceLoss 介绍
# BCE loss 计算 probability map 损失
class BalanceCrossEntropyLoss(nn.Module):
def __init__(self, negative_ratio=3.0, eps=1e-6):
super(BalanceCrossEntropyLoss, self).__init__()
self.negative_ratio = negative_ratio
self.eps = eps
def forward(self, pred, gt, mask):
if pred.dim() == 4:
pred = pred[:, 0, :, :]
positive = (gt * mask).byte()
negative = ((1 - gt) * mask).byte()
positive_count = int(positive.float().sum())
negative_count = min(int(negative.float().sum()), int(positive_count * self.negative_ratio))
loss = nn.functional.binary_cross_entropy(pred, gt, reduction='none')
positive_loss = loss * positive.float()
negative_loss = loss * negative.float()
negative_loss, _ = torch.topk(negative_loss.view(-1), negative_count)
balance_loss = (positive_loss.sum() + negative_loss.sum()) / (positive_count + negative_count + self.eps)
return balance_loss
# MaskL1Loss 计算 threshold map 损失
class MaskL1Loss(nn.Module):
def __init__(self):
super(MaskL1Loss, self).__init__()
def forward(self, pred, gt, mask):
mask_sum = mask.sum()
if mask_sum.item() == 0:
return mask_sum
else:
loss = (torch.abs(pred[:, 0] - gt) * mask).sum() / mask_sum
return loss
# DiceLoss 计算 approximate binary map 损失
class DiceLoss(nn.Module):
'''
Loss function from https://arxiv.org/abs/1707.03237
'''
def __init__(self, eps=1e-6):
super(DiceLoss, self).__init__()
self.eps = eps
def forward(self, pred, gt, mask):
if pred.dim() == 4:
pred = pred[:, 0, :, :]
assert pred.shape == gt.shape
assert pred.shape == mask.shape
interp = (pred * gt * mask).sum()
union = (pred * mask).sum() + (gt * mask).sum() + self.eps
loss = 1 - 2.0 * interp / union
return loss
class L1BalanceCELoss(nn.Module):
def __init__(self, eps=1e-6, l1_scale=10, bce_scale=1):
super(L1BalanceCELoss, self).__init__()
self.dice_loss = DiceLoss(eps=eps)
self.l1_loss = MaskL1Loss()
self.bce_loss = BalanceCrossEntropyLoss()
self.l1_scale = l1_scale # 不同损失赋予不同权重
self.bce_scale = bce_scale
def forward(self, pred, batch):
metrics = dict()
bce_loss = self.bce_loss(pred['binary'], batch['gt'], batch['mask'])
l1_loss = self.l1_loss(pred['thresh'], batch['thresh_map'], batch['thresh_mask'])
dice_loss = self.dice_loss(pred['thresh_binary'], batch['gt'], batch['mask'])
loss = dice_loss + self.l1_scale * l1_loss + bce_loss * self.bce_scale
metrics['binary_loss'] = bce_loss
metrics['thresh_loss'] = l1_loss
metrics['thresh_binary_loss'] = dice_loss
return loss, metrics
1.3 模型构建
本小节代码为检测模块,包括:
backbone 采用 ResNet-50 提取金字塔式特征;
decoder 对金字塔式特征进行上采样并集联,预测输出 probability map、threshold map 以及 approximate binary map。
'''
Backbone
'''
class Bottleneck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(Bottleneck, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.conv3 = nn.Conv2d(planes, planes * 4, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(planes * 4)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class ResNet(nn.Module):
def __init__(self, block=Bottleneck, layers=[3, 4, 6, 3], num_classes=1000):
super(ResNet, self).__init__()
self.inplanes = 64
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0])
self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
self.avgpool = nn.AvgPool2d(7, stride=1)
self.fc = nn.Linear(512 * block.expansion, num_classes)
self.smooth = nn.Conv2d(2048, 256, kernel_size=1, stride=1, padding=1)
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes * block.expansion, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for i in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x2 = self.layer1(x)
x3 = self.layer2(x2)
x4 = self.layer3(x3)
x5 = self.layer4(x4)
return x2, x3, x4, x5
'''
Decoder
'''
class SegDetector(nn.Module):
def __init__(self, in_channels=[256, 512, 1024, 2048], inner_channels=256, k=50, bias=False):
super(SegDetector, self).__init__()
self.k = k
self.up5 = nn.Upsample(scale_factor=2, mode='nearest')
self.up4 = nn.Upsample(scale_factor=2, mode='nearest')
self.up3 = nn.Upsample(scale_factor=2, mode='nearest')
self.in5 = nn.Conv2d(in_channels[-1], inner_channels, 1, bias=bias)
self.in4 = nn.Conv2d(in_channels[-2], inner_channels, 1, bias=bias)
self.in3 = nn.Conv2d(in_channels[-3], inner_channels, 1, bias=bias)
self.in2 = nn.Conv2d(in_channels[-4], inner_channels, 1, bias=bias)
self.out5 = nn.Sequential(
nn.Conv2d(inner_channels, inner_channels // 4, 3, padding=1, bias=bias),
nn.Upsample(scale_factor=8, mode='nearest'))
self.out4 = nn.Sequential(
nn.Conv2d(inner_channels, inner_channels // 4, 3, padding=1, bias=bias),
nn.Upsample(scale_factor=4, mode='nearest'))
self.out3 = nn.Sequential(
nn.Conv2d(inner_channels, inner_channels // 4, 3, padding=1, bias=bias),
nn.Upsample(scale_factor=2, mode='nearest'))
self.out2 = nn.Conv2d(
inner_channels, inner_channels//4, 3, padding=1, bias=bias)
self.binarize = nn.Sequential(
nn.Conv2d(inner_channels, inner_channels // 4, 3, padding=1, bias=bias),
nn.BatchNorm2d(inner_channels//4),
nn.ReLU(inplace=True),
nn.ConvTranspose2d(inner_channels//4, inner_channels//4, 2, 2),
nn.BatchNorm2d(inner_channels//4),
nn.ReLU(inplace=True),
nn.ConvTranspose2d(inner_channels//4, 1, 2, 2),
nn.Sigmoid())
self.binarize.apply(self.weights_init)
self.thresh = nn.Sequential(
nn.Conv2d(inner_channels, inner_channels // 4, 3, padding=1, bias=bias),
nn.BatchNorm2d(inner_channels//4),
nn.ReLU(inplace=True),
nn.ConvTranspose2d(inner_channels // 4, inner_channels // 4, 2, 2),
nn.BatchNorm2d(inner_channels//4),
nn.ReLU(inplace=True),
nn.ConvTranspose2d(inner_channels // 4, 1, 2, 2),
nn.Sigmoid())
self.thresh.apply(self.weights_init)
self.in5.apply(self.weights_init)
self.in4.apply(self.weights_init)
self.in3.apply(self.weights_init)
self.in2.apply(self.weights_init)
self.out5.apply(self.weights_init)
self.out4.apply(self.weights_init)
self.out3.apply(self.weights_init)
self.out2.apply(self.weights_init)
def weights_init(self, m):
# 模型权重初始化
classname = m.__class__.__name__
if classname.find('Conv') != -1:
nn.init.kaiming_normal_(m.weight.data)
elif classname.find('BatchNorm') != -1:
m.weight.data.fill_(1.)
m.bias.data.fill_(1e-4)
def forward(self, features):
c2, c3, c4, c5 = features
in5 = self.in5(c5)
in4 = self.in4(c4)
in3 = self.in3(c3)
in2 = self.in2(c2)
out4 = self.up5(in5) + in4 # 尺寸为输入图像的 1/16
out3 = self.up4(out4) + in3 # 1/8
out2 = self.up3(out3) + in2 # 1/4
p5 = self.out5(in5)
p4 = self.out4(out4)
p3 = self.out3(out3)
p2 = self.out2(out2)
fuse = torch.cat((p5, p4, p3, p2), 1) # 尺寸为 batch_size,64*4, H', W'
binary = self.binarize(fuse)
if self.training:
result = OrderedDict(binary=binary)
thresh = self.thresh(fuse)
thresh_binary = self.step_function(binary, thresh)
result.update(thresh=thresh, thresh_binary=thresh_binary)
return result
else:
return binary # for inference
def step_function(self, x, y):
return torch.reciprocal(1 + torch.exp(-self.k * (x - y)))
# 包装
class BasicModel(nn.Module):
def __init__(self):
nn.Module.__init__(self)
self.backbone = ResNet()
self.decoder = SegDetector()
def forward(self, data):
output = self.backbone(data)
output = self.decoder(output)
return output
class SegDetectorModel(nn.Module):
def __init__(self, device):
super(SegDetectorModel, self).__init__()
self.model = BasicModel()
self.criterion = L1BalanceCELoss()
self.device = device
self.to(self.device)
def forward(self, batch, training=True):
for key, value in batch.items():
if value is not None and hasattr(value, 'to'):
batch[key] = value.to(self.device)
pred = self.model(batch['image'].float())
if self.training:
loss, metrics = self.criterion(pred, batch) # 计算损失函数
return pred, loss, metrics
else:
return pred
打印模型输入、模型关键模块输出以及损失的数据结构,可视化模型预测输出的分割图。
train_dataset = ImageDataset(data_dir=det_args.train_dir, gt_dir=det_args.train_gt_dir, is_training=True, processes=train_processes)
train_dataloader = data.DataLoader(train_dataset, batch_size=2, num_workers=0, shuffle=True, drop_last=False)
batch = next(iter(train_dataloader))
# 模型各阶段数据格式
for key, value in batch.items():
if value is not None and hasattr(value, 'to'):
batch[key] = value.to(device)
model = SegDetectorModel(device)
model.train()
out1 = model.model.backbone(batch['image'].float())
out2 = model.model.decoder(out1)
loss, metrics = model.criterion(out2, batch)
# batch 输入
print('batch 输入:')
for key, value in batch.items():
print(key, value.shape)
print()
# backbone 输出
print('backbone 输出:')
for o1 in out1:
print(o1.shape)
print()
# decoder 输出
print('decoder 输出:')
for key, value in out2.items():
print(key, value.shape)
print()
# criterion 输出
print('criterion 输出:')
print('loss: ', loss)
print(metrics)
print()
# 画图
plt.figure(figsize=(60,60))
image = NormalizeImage.restore(batch['image'][0])
plt.subplot(141)
plt.title('image', fontdict={'size': 60})
plt.xticks([])
plt.yticks([])
plt.imshow(image)
probability_map = (batch['gt'][0].to('cpu').numpy() * 255).astype(np.uint8)
plt.subplot(142)
plt.title('probability_map', fontdict={'size': 60})
plt.xticks([])
plt.yticks([])
plt.imshow(probability_map, cmap='gray')
threshold_map = (batch['thresh_map'][0].to('cpu').numpy() * 255).astype(np.uint8)
plt.subplot(143)
plt.title('threshold_map', fontdict={'size': 60})
plt.xticks([])
plt.yticks([])
plt.imshow(threshold_map, cmap='gray')
# 模型预测的 approximate map
binary = (out2['binary'][0][0].detach().to('cpu').numpy() * 255).astype(np.uint8)
plt.subplot(144)
plt.title('binary', fontdict={'size': 60})
plt.xticks([])
plt.yticks([])
plt.imshow(binary, cmap='gray')

1.4 模型训练
本小节完成检测模型的训练。
# 学习率调整方法
class DecayLearningRate():
def __init__(self, lr=0.004, epochs=200, factor=0.9):
self.lr = lr
self.epochs = epochs
self.factor = factor
def get_learning_rate(self, epoch):
# 学习率随着训练过程进行不断下降
rate = np.power(1.0 - epoch / float(self.epochs + 1), self.factor)
return rate * self.lr
def update_learning_rate(self, optimizer, epoch):
lr = self.get_learning_rate(epoch)
for group in optimizer.param_groups:
group['lr'] = lr
return lr
# 检测模型训练
def det_train():
# model
model = SegDetectorModel(device)
# data_loader
train_dataset = ImageDataset(data_dir=det_args.train_dir, gt_dir=det_args.train_gt_dir, is_training=True, processes=train_processes)
train_dataloader = data.DataLoader(train_dataset, batch_size=det_args.batch_size, num_workers=det_args.num_workers, shuffle=True, drop_last=False)
# initialize dataloader and scheduler
optimizer = torch.optim.SGD(model.parameters(), lr=det_args.lr, momentum=0.9, weight_decay=1e-4)
scheduler = DecayLearningRate(lr=det_args.lr, epochs=det_args.max_epoch)
step = 0
epoch = 0
model.train()
os.makedirs(det_args.save_dir, exist_ok=True)
for epoch in range(det_args.max_epoch):
for batch in train_dataloader:
step += 1
current_lr = scheduler.update_learning_rate(optimizer, epoch) # 学习率调整
optimizer.zero_grad()
pred, loss, metrics = model.forward(batch, training=True)
loss.backward()
optimizer.step()
if step % det_args.print_interval == 0:
line = []
for key, l_val in metrics.items():
line.append('{0}: {1:.4f}'.format(key, l_val.mean()))
line = '\t'.join(line)
info = '\t'.join(['step:{:6d}', 'epoch:{:3d}', 'loss: {:4f}', '{}', 'lr: {:.4f}']).format(step, epoch, loss.item(), line, current_lr)
print(info)
if DEBUG: # DEBUG 这里只跑少量数据
break
# 保存阶段模型
if epoch % det_args.save_interval == 0:
save_name = 'checkpoint_' + str(epoch)
torch.save(model.state_dict(), os.path.join(det_args.save_dir, save_name))
if DEBUG:
break
# 保存最终模型
torch.save(model.state_dict(), det_args.saved_model_path)
# 运行训练代码
det_train()
1.5 模型测试
本小节利用训练完成的模型对测试集图片进行文字检测,并保存结果【如果检测模型训练不好,测试过程会非常慢】。
# 从分割图得到最终文字坐标的后处理方法
class SegDetectorRepresenter():
'''
从 probability map 得到检测框的方法
'''
def __init__(self, thresh=0.3, box_thresh=0.7, max_candidates=100):
self.thresh = thresh
self.box_thresh = box_thresh
self.max_candidates = max_candidates
self.min_size = 3
self.scale_ratio = 0.4
def represent(self, batch, pred):
images = batch['image']
segmentation = pred > self.thresh # 将预测分割图进行二值化
boxes_batch = []
scores_batch = []
for batch_index in range(images.size(0)):
height, width = batch['shape'][batch_index]
boxes, scores = self.polygons_from_bitmap(pred[batch_index], segmentation[batch_index], width, height)
boxes_batch.append(boxes)
scores_batch.append(scores)
return boxes_batch, scores_batch
def polygons_from_bitmap(self, pred, _bitmap, dest_width, dest_height):
assert _bitmap.size(0) == 1
bitmap = _bitmap.cpu().numpy()[0]
pred = pred.cpu().detach().numpy()[0]
height, width = bitmap.shape
boxes = []
scores = []
contours, _ = cv2.findContours((bitmap*255).astype(np.uint8), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE) # 找分割轮廓
for contour in contours[:self.max_candidates]:
epsilon = 0.01 * cv2.arcLength(contour, True)
approx = cv2.approxPolyDP(contour, epsilon, True) # 多边形拟合轮廓曲线
points = approx.reshape((-1, 2))
if points.shape[0] < 4:
continue
score = self.box_score_fast(pred, points.reshape(-1, 2)) # 计算分割区域的整体得分,去除低分候选区域
if self.box_thresh > score:
continue
if points.shape[0] > 2:
box = self.unclip(points, unclip_ratio=2.0) # 因为得到的分割结果是文本收缩区域,因此需要进行一定程度扩张
if len(box) != 1:
continue
else:
continue
box = box.reshape(-1, 2)
mini_box, sside = self.get_mini_boxes(box.reshape((-1, 1, 2))) # 计算最小外接矩形
if sside < self.min_size + 2:
continue
if not isinstance(dest_width, int):
dest_width = dest_width.item()
dest_height = dest_height.item()
mini_box[:, 0] = np.clip(np.round(mini_box[:, 0] / width * dest_width), 0, dest_width) # 尺寸与原图对齐
mini_box[:, 1] = np.clip(np.round(mini_box[:, 1] / height * dest_height), 0, dest_height)
boxes.append(mini_box.tolist())
scores.append(score)
return boxes, scores
def unclip(self, box, unclip_ratio=1.5):
'''
做一定程度的分割区域扩张
'''
poly = Polygon(box)
distance = poly.area * unclip_ratio / poly.length
offset = pyclipper.PyclipperOffset()
offset.AddPath(box, pyclipper.JT_ROUND, pyclipper.ET_CLOSEDPOLYGON)
expanded = np.array(offset.Execute(distance))
return expanded
def get_mini_boxes(self, contour):
bounding_box = cv2.minAreaRect(contour)
points = sorted(list(cv2.boxPoints(bounding_box)), key=lambda x: x[0])
index_1, index_2, index_3, index_4 = 0, 1, 2, 3
if points[1][1] > points[0][1]:
index_1 = 0
index_4 = 1
else:
index_1 = 1
index_4 = 0
if points[3][1] > points[2][1]:
index_2 = 2
index_3 = 3
else:
index_2 = 3
index_3 = 2
box = np.array([points[index_1], points[index_2],
points[index_3], points[index_4]]).reshape(4, 2)
return box, min(bounding_box[1])
def box_score_fast(self, bitmap, _box):
'''
计算多边形检测区域的分数(多边形所包含的像素点预测为前景文本的分数的平均值)
'''
h, w = bitmap.shape[:2]
box = _box.copy()
xmin = np.clip(np.floor(box[:, 0].min()).astype(np.int), 0, w - 1)
xmax = np.clip(np.ceil(box[:, 0].max()).astype(np.int), 0, w - 1)
ymin = np.clip(np.floor(box[:, 1].min()).astype(np.int), 0, h - 1)
ymax = np.clip(np.ceil(box[:, 1].max()).astype(np.int), 0, h - 1)
mask = np.zeros((ymax - ymin + 1, xmax - xmin + 1), dtype=np.uint8)
box[:, 0] = box[:, 0] - xmin
box[:, 1] = box[:, 1] - ymin
cv2.fillPoly(mask, box.reshape(1, -1, 2).astype(np.int32), 1)
return cv2.mean(bitmap[ymin:ymax+1, xmin:xmax+1], mask)[0]
# 测试图片处理
def resize_image(img):
# 图像最短边设定为预设长度,长边根据原图尺寸比例进行缩放
height, width, _ = img.shape
if height < width:
new_height = det_args.test_img_short_side
new_width = int(math.ceil(new_height / height * width / 32) * 32)
else:
new_width = det_args.test_img_short_side
new_height = int(math.ceil(new_width / width * height / 32) * 32)
resized_img = cv2.resize(img, (new_width, new_height))
return resized_img
def load_test_image(image_path):
RGB_MEAN = np.array([122.67891434, 116.66876762, 104.00698793])
img = cv2.imread(image_path, cv2.IMREAD_COLOR).astype('float32')
original_shape = img.shape[:2]
img = resize_image(img)
img -= RGB_MEAN
img /= 255.
img = torch.from_numpy(img).permute(2, 0, 1).float().unsqueeze(0)
return img, original_shape
# 检测结果输出
def format_output(det_res_dir, batch, output):
batch_boxes, batch_scores = output
for index in range(batch['image'].size(0)):
original_shape = batch['shape'][index]
filename = batch['filename'][index]
result_file_name = 'det_res_' + filename.split('/')[-1].split('.')[0] + '.txt'
result_file_path = os.path.join(det_res_dir, result_file_name)
boxes = batch_boxes[index]
scores = batch_scores[index]
with open(result_file_path, 'wt') as res:
for i, box in enumerate(boxes):
box = np.array(box).reshape(-1).tolist()
result = ",".join([str(int(x)) for x in box])
score = scores[i]
res.write(result + ',' + str(score) + "\n")
# 测试
def det_test():
# 模型加载
model = SegDetectorModel(device)
model.load_state_dict(torch.load(det_args.saved_model_path, map_location=device), strict=False)
model.eval()
# 后处理
representer = SegDetectorRepresenter(thresh=det_args.thresh, box_thresh=det_args.box_thresh, max_candidates=det_args.max_candidates)
# 推理
os.makedirs(det_args.det_res_dir, exist_ok=True)
batch = dict()
cnt = 0
with torch.no_grad():
for file in tqdm(os.listdir(det_args.test_dir)):
img_path = os.path.join(det_args.test_dir, file)
image, ori_shape = load_test_image(img_path)
batch['image'] = image
batch['shape'] = [ori_shape]
batch['filename'] = [file]
pred = model.forward(batch, training=False)
output = representer.represent(batch, pred)
format_output(det_args.det_res_dir, batch, output)
if DEBUG and cnt >= 6: # DEBUG
break
cnt += 1
# 运行测试代码
det_test()
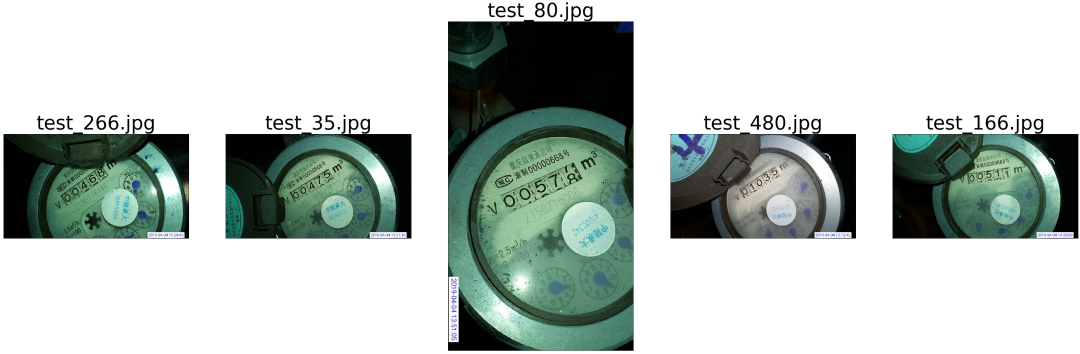
1.6 检测结果可视化
本小节对检测结果进行可视化,并将可视化结果保存到 temp/det_vis_test。
# 检测结果可视化
test_dir = 'datasets/data/test_imgs'
det_dir = 'temp/det_res'
det_vis_dir = 'temp/det_vis_test'
os.makedirs(det_vis_dir, exist_ok=True)
label_files = os.listdir(det_dir)
cnt = 0
plt.figure(figsize=(60,60))
for label_file in tqdm(label_files):
if not label_file.endswith('.txt'):
continue
image = cv2.imread(os.path.join(test_dir, label_file.replace('det_res_', '')[:-4] + '.jpg'))
with open(os.path.join(det_dir, label_file), 'r') as f:
lines = f.readlines()
save_name = label_file.replace('det_res_', '')[:-4]+'.jpg'
if len(lines) == 0:
cv2.imwrite(os.path.join(det_vis_dir, save_name), image)
else:
line = lines[0].strip().split(',')
locs = [float(t) for t in line[:8]]
# draw box
locs = np.array(locs).reshape(1, -1, 2).astype(np.int32)
image = cv2.imread(os.path.join(test_dir, label_file.replace('det_res_', '')[:-4] + '.jpg'))
cv2.polylines(image, locs, True, (255, 255, 0), 8)
# save images
save_name = label_file.replace('det_res_', '')[:-4]+'.jpg'
cv2.imwrite(os.path.join(det_vis_dir, save_name), image)
if cnt < 5: # 只画5张
plt.subplot(151 + cnt)
plt.title(save_name, fontdict={'size': 60})
plt.xticks([])
plt.yticks([])
plt.imshow(image)
cnt += 1
02
识别部分
2.1 参数设置
class RecOptions():
def __init__(self):
self.height = 32 # 图像尺寸
self.width = 100
self.voc_size = 21 # 字符数量 '0123456789ABCDEFGHIJ' + 'PADDING'位
self.decoder_sdim = 512
self.max_len = 5 # 文本长度
self.lr = 1.0
self.milestones = [40, 60] # 在第 40 和 60 个 epoch 训练时降低学习率
self.max_epoch = 80
self.batch_size = 64
self.num_workers = 8
self.print_interval = 25
self.save_interval = 125
self.train_dir = 'temp/rec_datasets/train_imgs'
self.test_dir = 'temp/rec_datasets/test_imgs'
self.save_dir = 'temp/rec_models/'
self.saved_model_path = 'temp/rec_models/checkpoint_final'
self.rec_res_dir = 'temp/rec_res/'
def set_(self, key, value):
if hasattr(self, key):
setattr(self, key, value)
rec_args = RecOptions()
if DEBUG:
rec_args.max_epoch = 1
rec_args.print_interval = 20
rec_args.save_interval = 1
rec_args.batch_size = 10
rec_args.num_workers = 0
2.2 数据处理
本小节代码是完成识别模型输入数据处理,包括:
标签处理:因为原始图像中水表读数显示可能在两个数字之间,这样的“半字符”归到任何一类都会产生比较大的歧义,因此定义新类别来表示这些“半字符”,即使用'A'-'J'类表示'0-1半字符'-‘9-0半字符’;
识别图像数据生成:原始图像数据是整张图,但是识别模型输入图像是文本区域图像,因此需要使用训练数据的文本位置标注裁剪整图中的文本区域。又因为检测得到的文本区域坐标构成的是倾斜四边形,所以需要使用透视变换得到水平文字图像;
数据导入:包括数据增强、识别字典构建(id2char、char2id)等。
'''
标签处理:定义新字符类处理半字符的情况,比如将'0-1半字符'归到'A'类,减小歧义
识别训练数据构造:从完整图像中裁剪出文本图像作为识别模型输入数据
'''
def PreProcess():
EXT_CHARS = {
'01': 'A', '12': 'B', '23': 'C', '34': 'D', '45': 'E',
'56': 'F', '67': 'G', '78': 'H', '89': 'I', '09': 'J'
}
train_dir = 'datasets/data/train_imgs'
train_labels_dir = 'datasets/data/train_gts'
word_save_dir = 'temp/rec_datasets/train_imgs' # 保存识别训练数据集
os.makedirs(word_save_dir, exist_ok=True)
label_files = os.listdir(train_labels_dir)
for label_file in tqdm(label_files):
with open(os.path.join(train_labels_dir, label_file), 'r') as f:
lines = f.readlines()
line = lines[0].strip().split()
locs = line[:8]
words = line[8:]
# 标签处理
if len(words) == 1:
ext_word = words[0]
else:
assert len(words) % 2 == 0
ext_word = ''
for i in range(len(words[0])):
char_i = [word[i] for word in words]
if len(set(char_i)) == 1:
ext_word += char_i[0]
elif len(set(char_i)) == 2:
char_i = list(set(char_i))
char_i.sort()
char_i = ''.join(char_i)
ext_char_i = EXT_CHARS[char_i]
ext_word += ext_char_i
locs = [int(t) for t in line[:8]]
# 将倾斜文字图像调整为水平图像
x1, y1, x2, y2, x3, y3, x4, y4 = locs
w = int(0.5 * (((x2-x1)**2+(y2-y1)**2)**0.5 + ((x4-x3)**2+(y4-y3)**2)**0.5))
h = int(0.5 * (((x2-x3)**2+(y2-y3)**2)**0.5 + ((x4-x1)**2+(y4-y1)**2)**0.5))
src_points = np.array([[x1, y1], [x2, y2], [x3, y3], [x4, y4]], dtype='float32')
dst_points = np.array([[0, 0], [w, 0], [w, h], [0, h]], dtype='float32')
M = cv2.getPerspectiveTransform(src_points, dst_points)
image = cv2.imread(os.path.join(train_dir, label_file.replace('.txt', '.jpg')))
word_image = cv2.warpPerspective(image, M, (w, h))
# save images
cv2.imwrite(os.path.join(word_save_dir, label_file.replace('.txt', '')+'_'+ext_word+'.jpg'), word_image)
# 运行识别训练数据前处理代码
PreProcess()
'''
数据集导入方法
'''
# data
class WMRDataset(data.Dataset):
def __init__(self, data_dir=None, max_len=5, resize_shape=(32, 100), train=True):
super(WMRDataset, self).__init__()
self.data_dir = data_dir
self.max_len = max_len
self.is_train = train
self.targets = [[os.path.join(data_dir, t), t.split('_')[-1][:5]] for t in os.listdir(data_dir) if t.endswith('.jpg')]
self.PADDING, self.char2id, self.id2char = self.gen_labelmap()
# 数据增强
self.transform = transforms.Compose([
transforms.Resize(resize_shape),
transforms.ColorJitter(brightness=0.5, contrast=0.5, saturation=0.5, hue=0.5),
# 可以添加更多的数据增强操作,比如 gaussian blur、shear 等
transforms.ToTensor()
])
def __len__(self):
return len(self.targets)
@staticmethod
def gen_labelmap(charset='0123456789ABCDEFGHIJ'):
# 构造字符和数字标签对应字典
PADDING = 'PADDING'
char2id = {t:idx for t, idx in zip(charset, range(1, 1+len(charset)))}
char2id.update({PADDING:0})
id2char = {v:k for k, v in char2id.items()}
return PADDING, char2id, id2char
def __getitem__(self, index):
assert index <= len(self), 'index range error'
img_path = self.targets[index][0]
word = self.targets[index][1]
img = Image.open(img_path)
label = np.full((self.max_len,), self.char2id[self.PADDING], dtype=np.int)
label_list = []
word = word[:self.max_len]
for char in word:
label_list.append(self.char2id[char])
label_len = len(label_list)
assert len(label_list) <= self.max_len
label[:len(label_list)] = np.array(label_list)
if self.transform is not None and self.is_train:
img = self.transform(img)
img.sub_(0.5).div_(0.5)
label_len = np.array(label_len).astype(np.int32)
label = np.array(label).astype(np.int32)
return img, label, label_len # 输出图像、文本标签、标签长度, 计算 CTC loss 需要后两者信息
可视化完成数据处理后的图像,打印识别标签。
dataset = WMRDataset(rec_args.train_dir, max_len=5, resize_shape=(rec_args.height, rec_args.width), train=True)
train_dataloader = data.DataLoader(dataset, batch_size=2, shuffle=True, pin_memory=True, drop_last=False)
batch = next(iter(train_dataloader))
image, label, label_len = batch
image = ((image[0].permute(1, 2, 0).to('cpu').numpy() * 0.5 + 0.5) * 255).astype(np.uint8)
plt.title('image')
plt.xticks([])
plt.yticks([])
plt.imshow(image)
label_digit = label[0].to('cpu').numpy().tolist()
label_str = ''.join([dataset.id2char[t] for t in label_digit if t > 0])
print('label_digit: ', label_digit)
print('label_str: ', label_str)
2.3 模型构建
本小节代码是识别模块,包括:
类ResNet结构的backbone提取视觉特征
基于双向LSTM的decoder得到字符概率预测
CTC Loss计算损失
# backbone
class _Block(nn.Module):
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(_Block, self).__init__()
self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, stride=stride, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=1, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
residual = self.downsample(x)
out += residual
out = self.relu(out)
return out
class RecBackbone(nn.Module):
def __init__(self):
super(RecBackbone, self).__init__()
in_channels = 3
self.layer0 = nn.Sequential(
nn.Conv2d(in_channels, 32, kernel_size=(3, 3), stride=1, padding=1, bias=False),
nn.BatchNorm2d(32),
nn.ReLU(inplace=True))
self.inplanes = 32
self.layer1 = self._make_layer(32, 3, [2, 2]) # [16, 50]
self.layer2 = self._make_layer(64, 4, [2, 2]) # [8, 25]
self.layer3 = self._make_layer(128, 6, [2, 1]) # [4, 25]
self.layer4 = self._make_layer(256, 6, [2, 1]) # [2, 25]
self.layer5 = self._make_layer(512, 3, [2, 1]) # [1, 25]
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode="fan_out", nonlinearity="relu")
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
def _make_layer(self, planes, blocks, stride):
downsample = None
if stride != [1, 1] or self.inplanes != planes:
downsample = nn.Sequential(
nn.Conv2d(self.inplanes, planes, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(planes))
layers = []
layers.append(_Block(self.inplanes, planes, stride, downsample))
self.inplanes = planes
for _ in range(1, blocks):
layers.append(_Block(self.inplanes, planes))
return nn.Sequential(*layers)
def forward(self, x):
x0 = self.layer0(x)
x1 = self.layer1(x0)
x2 = self.layer2(x1)
x3 = self.layer3(x2)
x4 = self.layer4(x3)
x5 = self.layer5(x4)
cnn_feat = x5.squeeze(2) # [N, c, w]
cnn_feat = cnn_feat.transpose(2, 1)
return cnn_feat
# decoder
class BidirectionalLSTM(nn.Module):
def __init__(self, nIn=512, nHidden=512, nOut=512):
super(BidirectionalLSTM, self).__init__()
self.rnn = nn.LSTM(nIn, nHidden, bidirectional=True)
self.embedding = nn.Linear(nHidden * 2, nOut)
def forward(self, input):
recurrent, _ = self.rnn(input)
T, b, h = recurrent.size()
t_rec = recurrent.view(T * b, h)
output = self.embedding(t_rec) # [T * b, nOut]
output = output.view(T, b, -1)
return output
# basic
class RecModelBuilder(nn.Module):
def __init__(self, rec_num_classes, sDim=512):
super(RecModelBuilder, self).__init__()
self.rec_num_classes = rec_num_classes
self.sDim = sDim
self.encoder = RecBackbone()
self.decoder = nn.Sequential(
BidirectionalLSTM(sDim, sDim, sDim),
BidirectionalLSTM(sDim, sDim, rec_num_classes))
self.rec_crit = nn.CTCLoss(zero_infinity=True)
def forward(self, inputs):
x, rec_targets, rec_lengths = inputs
batch_size = x.shape[0]
encoder_feats = self.encoder(x) # N, T, C
encoder_feats = encoder_feats.transpose(0, 1).contiguous() # T, N, C
rec_pred = self.decoder(encoder_feats)
if self.training:
rec_pred = rec_pred.log_softmax(dim=2)
preds_size = torch.IntTensor([rec_pred.size(0)] * batch_size)
loss_rec = self.rec_crit(rec_pred, rec_targets, preds_size, rec_lengths)
return loss_rec
else:
rec_pred_scores = torch.softmax(rec_pred.transpose(0, 1), dim=2)
return rec_pred_scores
打印模型输入、模型关键模块输出以及损失的数据结构。
'''
模型各阶段数据结构展示
'''
dataset = WMRDataset(rec_args.train_dir, max_len=rec_args.max_len, resize_shape=(rec_args.height, rec_args.width), train=True)
train_dataloader = data.DataLoader(dataset, batch_size=2, num_workers=0, shuffle=True, pin_memory=True, drop_last=False)
batch = next(iter(train_dataloader))
model = RecModelBuilder(rec_num_classes=rec_args.voc_size, sDim=rec_args.decoder_sdim)
model = model.to(device)
model.train()
image, rec_targets, rec_lengths = [v.to(device) for v in batch]
encoder_out = model.encoder(image)
decoder_out = model.decoder(encoder_out.transpose(0, 1).contiguous())
# batch 输入
print('batch 输入 [image, label, label_length]:')
print(batch[0].shape)
print(batch[1].shape)
print(batch[2].shape)
print()
# encoder 输出
print('encoder 输出:')
print(encoder_out.shape)
print()
# decoder 输出
print('decoder 输出:')
print(decoder_out.shape)
2.4 模型训练
本小节完成识别模型训练。
# train
def rec_train():
# dataset
dataset = WMRDataset(rec_args.train_dir, max_len=rec_args.max_len, resize_shape=(rec_args.height, rec_args.width), train=True)
train_dataloader = data.DataLoader(dataset, batch_size=rec_args.batch_size, num_workers=rec_args.num_workers, shuffle=True, pin_memory=True, drop_last=False)
# model
model = RecModelBuilder(rec_num_classes=rec_args.voc_size, sDim=rec_args.decoder_sdim)
model = model.to(device)
model.train()
# Optimizer
param_groups = filter(lambda p: p.requires_grad, model.parameters())
optimizer = torch.optim.Adadelta(param_groups, lr=rec_args.lr)
scheduler = torch.optim.lr_scheduler.MultiStepLR(optimizer, milestones=rec_args.milestones, gamma=0.1)
os.makedirs(rec_args.save_dir, exist_ok=True)
# do train
step = 0
for epoch in range(rec_args.max_epoch):
current_lr = optimizer.param_groups[0]['lr']
for i, batch in enumerate(train_dataloader):
step += 1
batch = [v.to(device) for v in batch]
loss = model(batch)
optimizer.zero_grad()
loss.backward()
optimizer.step()
# print
if step % rec_args.print_interval == 0:
print('step: {:4d}\tepoch: {:4d}\tloss: {:.4f}'.format(step, epoch, loss.item()))
scheduler.step()
# save
if epoch % rec_args.save_interval == 0:
save_name = 'checkpoint_' + str(epoch)
torch.save(model.state_dict(), os.path.join(rec_args.save_dir, save_name))
torch.save(model.state_dict(), rec_args.saved_model_path)
# 运行训练代码
rec_train()
2.5 模型测试
本小节利用训练完成的识别模型对测试图像进行测试,保存识别结果。
'''
根据检测结果生成识别模型测试数据
'''
def rec_test_data_gen():
test_dir = 'datasets/data/test_imgs'
det_dir = 'temp/det_res'
word_save_dir = 'temp/rec_datasets/test_imgs'
os.makedirs(word_save_dir, exist_ok=True)
label_files = os.listdir(det_dir)
for label_file in tqdm(label_files):
if not label_file.endswith('.txt'):
continue
with open(os.path.join(det_dir, label_file), 'r') as f:
lines = f.readlines()
if len(lines) == 0:
continue
line = lines[0].strip().split(',')
locs = [float(t) for t in line[:8]]
# image warp
x1, y1, x2, y2, x3, y3, x4, y4 = locs
w = int(0.5 * (((x2-x1)**2+(y2-y1)**2)**0.5 + ((x4-x3)**2+(y4-y3)**2)**0.5))
h = int(0.5 * (((x2-x3)**2+(y2-y3)**2)**0.5 + ((x4-x1)**2+(y4-y1)**2)**0.5))
src_points = np.array([[x1, y1], [x2, y2], [x3, y3], [x4, y4]], dtype='float32')
dst_points = np.array([[0, 0], [w, 0], [w, h], [0, h]], dtype='float32')
M = cv2.getPerspectiveTransform(src_points, dst_points)
image = cv2.imread(os.path.join(test_dir, label_file.replace('det_res_', '')[:-4] + '.jpg'))
word_image = cv2.warpPerspective(image, M, (w, h))
# save images
cv2.imwrite(os.path.join(word_save_dir, label_file.replace('det_res_', '')[:-4]+'.jpg'), word_image)
# 使用检测模型获取识别测试数据
rec_test_data_gen()
# inference
# 模型输出进行CTC对应解码,去除blank,将连续同字符合并
def rec_decode(rec_prob, labelmap, blank=0):
raw_str = torch.max(rec_prob, dim=-1)[1].data.cpu().numpy()
res_str = []
for b in range(len(raw_str)):
res_b = []
prev = -1
for ch in raw_str[b]:
if ch == prev or ch == blank:
prev = ch
continue
res_b.append(labelmap[ch])
prev = ch
res_str.append(''.join(res_b))
return res_str
def rec_load_test_image(image_path, size=(100, 32)):
img = Image.open(image_path)
img = img.resize(size, Image.BILINEAR)
img = torchvision.transforms.ToTensor()(img)
img.sub_(0.5).div_(0.5)
return img.unsqueeze(0)
# 测试
def rec_test():
model = RecModelBuilder(rec_num_classes=rec_args.voc_size, sDim=rec_args.decoder_sdim)
model.load_state_dict(torch.load(rec_args.saved_model_path, map_location=device))
model.eval()
os.makedirs(rec_args.rec_res_dir, exist_ok=True)
_, _, labelmap = WMRDataset().gen_labelmap() # labelmap是类别和字符对应的字典
with torch.no_grad():
for file in tqdm(os.listdir(rec_args.test_dir)):
img_path = os.path.join(rec_args.test_dir, file)
image = rec_load_test_image(img_path)
batch = [image, None, None]
pred_prob = model.forward(batch)
# todo post precess
rec_str = rec_decode(pred_prob, labelmap)[0]
# write to file
with open(os.path.join(rec_args.rec_res_dir, file.replace('.jpg', '.txt')), 'w') as f:
f.write(rec_str)
# 运行测试代码
rec_test()
2.6 最终结果生成
由于识别训练时进行了半字符类别的转换,因此识别结果需要转换回去,'A'类对应半字符'0-1',可以将其转换成'0'或者'1',这里选择后者。最终结果存储在 work/final_res.txt。
'''
识别结果后处理
'''
def final_postProcess():
SPECIAL_CHARS = {k:v for k, v in zip('ABCDEFGHIJ', '1234567890')}
test_dir = 'datasets/data/test_imgs'
rec_res_dir = 'temp/rec_res'
rec_res_files = os.listdir(rec_res_dir)
final_res = dict()
for file in os.listdir(test_dir):
res_file = file.replace('.jpg', '.txt')
if res_file not in rec_res_files:
final_res[file] = ''
continue
with open(os.path.join(rec_res_dir, res_file), 'r') as f:
rec_res = f.readline().strip()
final_res[file] = ''.join([t if t not in 'ABCDEFGHIJ' else SPECIAL_CHARS[t] for t in rec_res])
with open('work/final_res.txt', 'w') as f:
for key, value in final_res.items():
f.write(key + '\t' + value + '\n')
# 生成最终的测试结果
final_postProcess()
对最终的识别结果进行可视化。
'''
最终结果可视化
'''
%matplotlib inline
import matplotlib
import matplotlib.pyplot as plt
with open('work/final_res.txt', 'r') as f:
lines = f.readlines()
plt.figure(figsize=(60,60))
lines = lines[:5]
for i, line in enumerate(lines):
if len(line.strip().split()) == 1:
image_name = line.strip() # 没有识别出来
word = '###'
else:
image_name, word = line.strip().split()
image = cv2.imread(os.path.join(test_dir, image_name))
plt.subplot(151+i)
plt.title(word, fontdict={'size': 50})
plt.xticks([])
plt.yticks([])
plt.imshow(image)
03
重难点解析
主要是将任务拆解为两个子任务,先使用原始数据完成检测算法优化,利用检测结果生成识别训练数据,再完成识别算法的优化。
04
优化思路和方法
探索数据合成和数据增强
训练其他检测识别模型并进行结果融合,包括设计单字符检测识别模型
利用几何信息对检测结果进行修正,比如根据集合信息或者识别结果判断字符串两端漏检时,可以通过对字符宽度记性估计实现检测补全
05
手撕算法面试
问

文字检测模型DB为什么具备较快的推理速度?DB的监督信息和损失函数是如何设计的?
论文《Real-time Scene Text Detection with Differentiable Binarization》博客 文本检测 DB:Real-time Scene Text Detection with Differentiable Binarization。
答
问
经典文字识别算法CRNN使用的损失函数是什么?具体如何实现?
论文《An End-to-End Trainable Neural Network for Image-based Sequence Recognition and Its Application to Scene Text Recognition》 博客 一文读懂CRNN+CTC文字识别。
答
06
总结
本案例基于主流经典算法DB和CRNN实现真实场景下的水表读数自动识别,帮助读者了解场景文字识别的通用流程,包括数据处理、模型构建、模型训练和测试等,分析了任务难点并提出优化思路,最后举例相关算法面试问题供读者思考。
在我爱计算机视觉公众号后台回复 “水表数据” 即可一键下载本数据集。

备注:OCR

OCR交流群
扫码备注拉你入群。
在看,让更多人看到 

















 672
672

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









